1.概念
线程:一个多线程程序包含两个或多个能并发运行的部分。程序的每一部分都称作一个线程,并且每个线程定义了一个独立的执行路径。
进程:一个进程包括由操作系统分配的内存空间,包含一个或多个线程。一个线程不能独立的存在,它必须是进程的一部分。一个进程一直运行,直到所有的非守候线程都结束运行后才能结束。
2.一个线程的生命周期
3.线程的5种状态
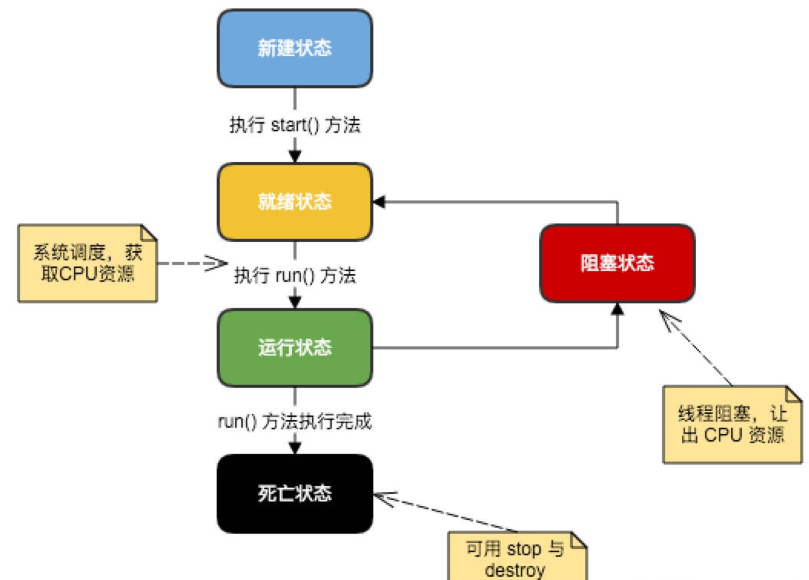
- 新建状态:
使用 new 关键字和 Thread 类或其子类建立一个线程对象后,该线程对象就处于新建状态。它保持这个状态直到程序 start() 这个线程。
- 就绪状态:
当线程对象调用了start()方法之后,该线程就进入就绪状态。就绪状态的线程处于就绪队列中,要等待JVM里线程调度器的调度。
- 运行状态:
如果就绪状态的线程获取 CPU 资源,就可以执行 run(),此时线程便处于运行状态。处于运行状态的线程最为复杂,它可以变为阻塞状态、就绪状态和死亡状态。
- 阻塞状态:
如果一个线程执行了sleep(睡眠)、suspend(挂起)等方法,失去所占用资源之后,该线程就从运行状态进入阻塞状态。在睡眠时间已到或获得设备资源后可以重新进入就绪状态。可以分为三种:
-
等待阻塞:运行状态中的线程执行 wait() 方法,使线程进入到等待阻塞状态。
-
同步阻塞:线程在获取 synchronized 同步锁失败(因为同步锁被其他线程占用)。
-
其他阻塞:通过调用线程的 sleep() 或 join() 发出了 I/O 请求时,线程就会进入到阻塞状态。当sleep() 状态超时,join() 等待线程终止或超时,或者 I/O 处理完毕,线程重新转入就绪状态。
-
- 死亡状态:
一个运行状态的线程完成任务或者其他终止条件发生时,该线程就切换到终止状态
4.Java线程的三种创建方法
- 通过实现 Runnable 接口;
package jsontest; public class RunableDemo implements Runnable { private Thread t ; private String name ; private RunableDemo(String name){ this.name = name ; System.out.println("-----------新建线程"+name); } public Thread getT() { return t; } public void setT(Thread t) { this.t = t; } public String getName() { return name; } public void setName(String name) { this.name = name; } private void start() { if(t==null){ t = new Thread(this,name); t.start(); } } @Override public void run() { System.out.println("-----------线程:"+name+"被调用"); } public static void main(String[] args) { RunableDemo d = new RunableDemo("testThread") ; d.start(); } }
- 通过继承 Thread 类本身
-
package jsontest; public class RunableDemo implements Runnable { @Override public void run() { for(int i=0;i<5;i++){ System.out.println("-----------"+i); } } public static void main(String[] args) { RunableDemo d = new RunableDemo() ; RunableDemo d2 = new RunableDemo() ; Thread t = new Thread(d) ; Thread t2 = new Thread(d2) ; t.start(); t2.start(); } }
- 通过 Callable 和 Future 创建线程。
上述主要讲解了三种常见的线程创建方式,对于线程的启动而言,都是调用线程对象的start()方法,需要特别注意的是:不能对同一线程对象两次调用start()方法。
5.由于实际的业务需要,常常会遇到需要在特定时机终止某一线程的运行,使其进入到死亡状态。目前最通用的做法是设置一boolean型的变量,当条件满足时,使线程执行体快速执行完毕
public class ThreadTest { public static void main(String[] args) { MyRunnable myRunnable = new MyRunnable(); Thread thread = new Thread(myRunnable); for (int i = 0; i < 100; i++) { System.out.println(Thread.currentThread().getName() + " " + i); if (i == 30) { thread.start(); } if(i == 40){ myRunnable.stopThread(); } } } } class MyRunnable implements Runnable { private boolean stop; @Override public void run() { for (int i = 0; i < 100 && !stop; i++) { System.out.println(Thread.currentThread().getName() + " " + i); } } public void stopThread() { this.stop = true; } }
参考:http://www.cnblogs.com/lwbqqyumidi/p/3804883.html