下面接着之前经过简化并调整好视觉效果的模型继续工作流,为了使模型能受控制运动起来必须在合适的位置上添加相应的运动副/关节。一般情况下我们可以查阅手册或根据设计图纸获得这些关节的准确位置和姿态,知道这些信息以后就可以通过[Menu bar --> Add --> Joints --> ...]来添加关节了, 之后可以通过位置和姿态对话框来调整关节位置姿态。在之前写过的V-rep学习笔记:曲柄摇杆机构中就是按照这种方式添加的关节。
如果我们有机器人的DH参数表也可以使用VREP中的工具来生成关节[Model browser-->tools-->Denavit-Hartenberg joint creator]. 以机器人学导论书中简单的三连杆机械手臂为例:

可以很容易写出其DH参数表:

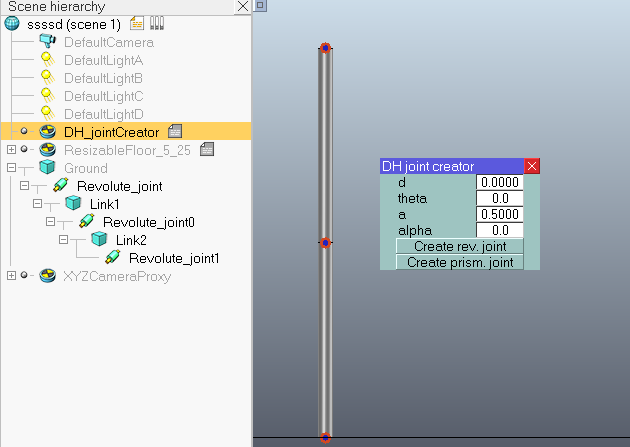
我们将关节创建工具拖入场景中,选择地面作为根节点,然后填入表格中所示的DH参数,点击创建旋转关节。L1、L2杆长均为0.5m,$ heta$为关节变量,这里初始化为0,则三次的参数分别输入为:

有时我们无法知道关节的准确位置,只能通过现有的网格模型去创建关节。以基座的转动关节为例(先将其它部分隐藏,后面会讲到),可以用基座上表面的规则圆面作为参考来定位关节。
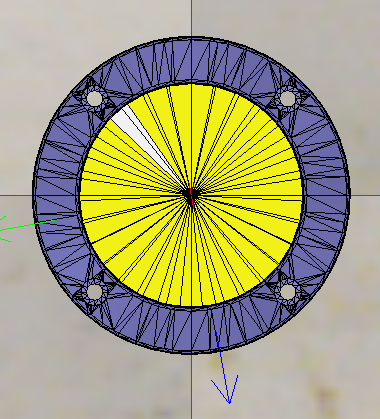
进入Shape edit模式,通过Page selector选择俯视图(如下面左图所示),在Triangle edit模式下通过框选可以很容易选中所有三角面片;或者可以选择正视图,进入顶点编辑模式(Vertex edit mode),选中如下面右图所示的所有顶点,然后切换回面编辑模式,可以发现所有的三角面已经选中。接着点击Extract cylinder在这个位置上生成规则圆柱体。

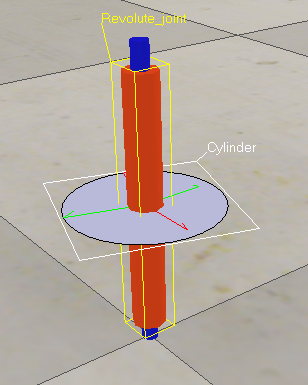
接下来添加转动关节:按Ctrl键先后选中该关节和之前创建的圆柱体,然后打开位置调整对话框,点击Apply to selection,这一操作会使关节的X、Y、Z坐标与圆柱体一致。如果想单独控制X、Y、Z坐标对齐,可以点左侧的Apply X/Y/Z to selection,这样就将关节放到了合适的位置。

剩下的关节也可以按照这种方式创建:

有时为了对特定的部件进行操作需要隐藏其它部分以便观察,可以通过设置物体所在图层来实现这一功能。双击要隐藏物体的图标打开Common属性页,在可见性一栏中可以看到16个图层:物体默认创建在图层1,将其移动到图层9中(默认图层1~8内的物体是可见的,图层9~16内的物体是隐藏的),隐藏后物体名将变灰。

如果要显示图层9~16内的物体可以打开Layer selection对话框:

[Layer selection dialog toolbar button]
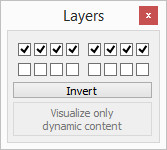
如下图所示,默认只勾选了图层1~8,要显示图层9只需要勾选该图层即可:
参考: