gym环境:FrozenLake-v0:http://gym.openai.com/envs/FrozenLake-v0/
代码来自:周博磊老师的GitHub:https://github.com/cuhkrlcourse/RLexample/tree/master/MDP
环境如下:
SFFF (S: starting point, safe)
FHFH (F: frozen surface, safe)
FFFH (H: hole, fall to your doom)
HFFG (G: goal, where the frisbee is located)
- 环境解释:冰封湖问题,智能体控制角色在网格世界中的移动。网格中的某些冰面是可行走的,而某些冰面会导致主体掉入水中。另外,智能体的移动方向是不确定的,并且仅部分取决于所选方向。(也就是如果你想向上走,你选择的动作是向上走,但是实际不一定向上走,可能会发生偏移,向左,或向右,三个方向的概率是等价的,也就是都是0.3333)代理商因找到通往目标砖的可步行路径而获得奖励。
# env.nA, 表示每个可以选择的动作的个数为4,动作空间
# env.nS, 表示状态的总数为16,状态空间
# env.P[state][a], 表示在状态state下执行动作a,返回的是prob概率, next_state下一个状态,reward奖励, done是否结束
Policy Iteration:
-
目标:寻找一个最后策略:(pi)
-
解决方法:不断的迭代Bellman expectation backup(下面的公式5)
-
Policy Iteration algorithm:
At each iteration t+1
update (v_{t+1}(s)) from (v_t(s')) for all states (s in S) where (s') is a successor states of s
(v_{t+1}(s)=sum_{a in A}pi(a|s)[R(s,a)+gammasum_{s'in S}P(s'|s,a)v_t(s')])
Convergence: (v_1 o v_2 o ... o v^pi)
-
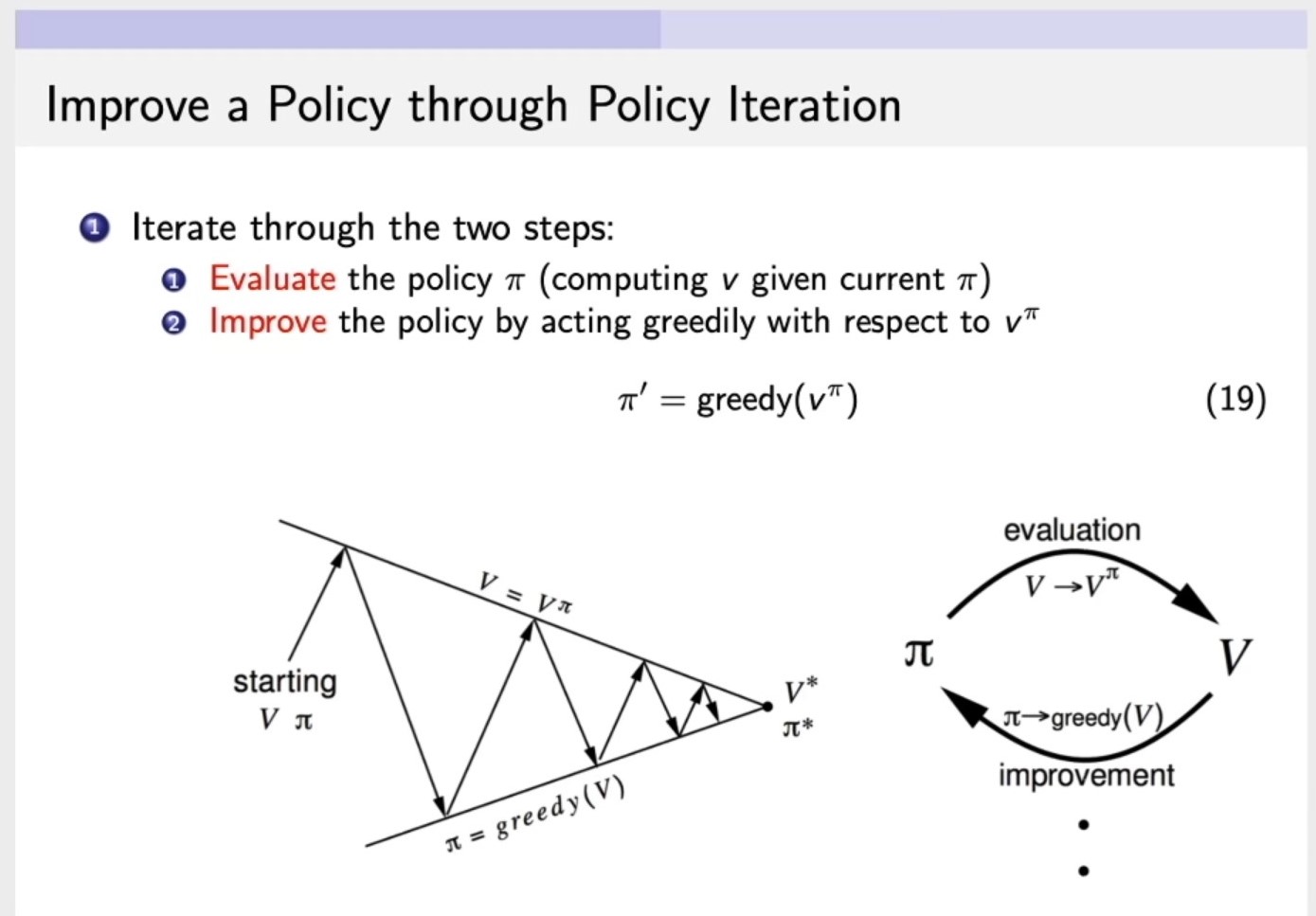
Iterate through the two steps:
Evaluatethe policy (pi) (computing (v) given current (pi)),第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值。Improvethe policy by acting greedily wirh respect to (v^pi),第二步:改进策略policy,通过对 (v^pi) (第一步通过(pi)求解出来的(v))采取贪心的算法,来改进策略policy。
Policy Iteration:
"""
Solving FrozenLake environment using Policy-Iteration.
Adapted by Bolei Zhou for IERG6130. Originally from Moustafa Alzantot (malzantot@ucla.edu)
"""
import numpy as np
import gym
RENDER=False
GAMMA=1.0
# 计算策略policy跑一个回合的奖励:输入环境,策略以及衰减因子,跑一个回合,返回奖励值
def run_episode(env, policy, gamma = GAMMA, render = False):
""" Runs an episode and return the total reward """
obs = env.reset()
# 重置环境
total_reward = 0
step_idx = 0
while True:
if render:
env.render()
# 如果想看环境渲染的话,就设置输入的render为True,render默认为False
obs, reward, done , _ = env.step(int(policy[obs]))
total_reward += (gamma ** step_idx * reward)
step_idx += 1
if done:
break
return total_reward,step_idx
# 计算策略policy的平均奖励
def evaluate_policy(env, policy, gamma = GAMMA, n = 100):
scores = [run_episode(env, policy, gamma, render=RENDER) for _ in range(n)]
return np.mean(scores)
# 第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值
def compute_policy_v(env, policy, gamma=GAMMA):
""" Iteratively evaluate the value-function under policy.
Alternatively, we could formulate a set of linear equations in iterms of v[s]
and solve them to find the value function.
"""
v = np.zeros(env.env.nS)
eps = 1e-10
# 将精度收敛到eps的时候,就停止更新
while True:
prev_v = np.copy(v)
for s in range(env.env.nS):
policy_a = policy[s]
v[s] = sum([p * (r + gamma * prev_v[s_]) for p, s_, r, _ in env.env.P[s][policy_a]])
if (np.sum((np.fabs(prev_v - v))) <= eps):
# value converged
break
return v
# 第二步:改进策略policy,通过对old_policy_v采取贪心的算法,来改进策略policy
def extract_policy(v, gamma = GAMMA):
""" Extract the policy given a value-function """
policy = np.zeros(env.env.nS)
for s in range(env.env.nS):
q_sa = np.zeros(env.env.nA)
for a in range(env.env.nA):
q_sa[a] = sum([p * (r + gamma * v[s_]) for p, s_, r, _ in env.env.P[s][a]])
policy[s] = np.argmax(q_sa)
return policy
# policy_iteration的主要算法
def policy_iteration(env, gamma = GAMMA):
""" Policy-Iteration algorithm """
policy = np.random.choice(env.env.nA, size=(env.env.nS)) # initialize a random policy
max_iterations = 200000
gamma = GAMMA
for i in range(max_iterations):
old_policy_v = compute_policy_v(env, policy, gamma)
# 第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值
new_policy = extract_policy(old_policy_v, gamma)
# 第二步:改进策略policy,通过对old_policy_v采取贪心的算法,来改进策略policy
if (np.all(policy == new_policy)):
# 如果policy已经不在发生改变了,也就是收敛了,无法提升了
print ('Policy-Iteration converged at step %d.' %(i+1))
break
policy = new_policy
return policy
if __name__ == '__main__':
env_name = 'FrozenLake-v0' # 'FrozenLake4x4-v0'
env = gym.make(env_name)
optimal_policy = policy_iteration(env, gamma = GAMMA)
scores = evaluate_policy(env, optimal_policy, gamma = GAMMA)
print('Average scores = ', np.mean(scores))
print(optimal_policy)
total,step=run_episode(env,optimal_policy,GAMMA,True)
print("一共走了:",step)
Value Iteration:
-
目标:寻找一个最后策略:(pi)
-
解决方法:不断的迭代Bellman optimality backup(下面的公式5)
-
Value Iteration algorithm:
initialize (k =1) and (v_0(s)=0) for all states (s)
For (k=1) : (H)
for each state (s)
(q_{k+1}(s,a)=R(s,a)+gammasum_{s' in S}P(s'|s,a)v_k(s'))
(v_{k+1}(s)=max_aq_{k+1}(s,a))
(k leftarrow k+1)
To retrieve the optimal policy after the value iteration:
(pi(s)=argmax_a[R(s,a)+gammasum_{s' in S}P(s'|s,a)v_{k+1}(s')])
Value Iteration:
"""
Solving FrozenLake environment using Value-Itertion.
Updated 17 Aug 2020
"""
import numpy as np
import gym
from gym import wrappers
from gym.envs.registration import register
def run_episode(env, policy, gamma = 1.0, render = False):
""" Evaluates policy by using it to run an episode and finding its
total reward.
args:
env: gym environment.
policy: the policy to be used.
gamma: discount factor.
render: boolean to turn rendering on/off.
returns:
total reward: real value of the total reward recieved by agent under policy.
"""
obs = env.reset()
total_reward = 0
step_idx = 0
while True:
if render:
env.render()
obs, reward, done , _ = env.step(int(policy[obs]))
total_reward += (gamma ** step_idx * reward)
step_idx += 1
if done:
break
return total_reward
def evaluate_policy(env, policy, gamma = 1.0, n = 100):
""" Evaluates a policy by running it n times.
returns:
average total reward
"""
scores = [
run_episode(env, policy, gamma = gamma, render = False)
for _ in range(n)]
return np.mean(scores)
def extract_policy(v, gamma = 1.0):
""" Extract the policy given a value-function """
policy = np.zeros(env.env.nS)
for s in range(env.env.nS):
q_sa = np.zeros(env.action_space.n)
for a in range(env.action_space.n):
for next_sr in env.env.P[s][a]:
# next_sr is a tuple of (probability, next state, reward, done)
p, s_, r, _ = next_sr
q_sa[a] += (p * (r + gamma * v[s_]))
policy[s] = np.argmax(q_sa)
return policy
def value_iteration(env, gamma = 1.0):
""" Value-iteration algorithm """
v = np.zeros(env.env.nS) # initialize value-function
max_iterations = 100000
eps = 1e-20
for i in range(max_iterations):
prev_v = np.copy(v)
q_sa=np.zeros(env.env.nA)
for s in range(env.env.nS):
for a in range(env.env.nA):
q_sa[a] = sum([p*(r + gamma * prev_v[s_]) for p, s_, r, _ in env.env.P[s][a]])
v[s] = max(q_sa)
if (np.sum(np.fabs(prev_v - v)) <= eps):
print ('Value-iteration converged at iteration# %d.' %(i+1))
break
return v
if __name__ == '__main__':
env_name = 'FrozenLake-v0' # 'FrozenLake4x4-v0'
env = gym.make(env_name)
gamma = 1.0
optimal_v = value_iteration(env, gamma);
policy = extract_policy(optimal_v, gamma)
policy_score = evaluate_policy(env, policy, gamma, n=1000)
print('Policy average score = ', policy_score)
print(policy)
Policy Iteration和Value Iteration的区别:
①:Policy iteration主要包括两部分:policy evaluation+policy improvement,这两部分反复迭代,直到收敛。初始化一个策略policy,对策略policy进行价值评估,然后再根据价值,重新制定最优策略,反复迭代。
②:Value iteration主要包括两部分:finding optimal value function+one policy extraction,寻找一个最优的价值函数,然后根据价值函数,指定最优的策略,因为价值函数是最优的,所以策略也是最优的。
③:策略迭代的收敛速度更快一些,在状态空间较小时,最好选用策略迭代方法。当状态空间较大时,值迭代的计算量更小一些。
| Problem | Bellman Equation | Algorithm |
|---|---|---|
| Prediction | Bellman Expectation Equation | Iterative Policy Evaluation |
| Control | Bellman Expectation Equation | Policy Iteration |
| Control | Bellman Optimality Equation | Value Iteration |
Bellman expectation Equation:(当前状态跟未来状态的一个关联,(G_t)展开的首项是(R_{t+1}))
(3)式和(4)式象征着价值函数和q函数之间的关联
(4)式带入到(3)式中得到(象征着当前状态的价值与未来状态的价值之间的一个关联)

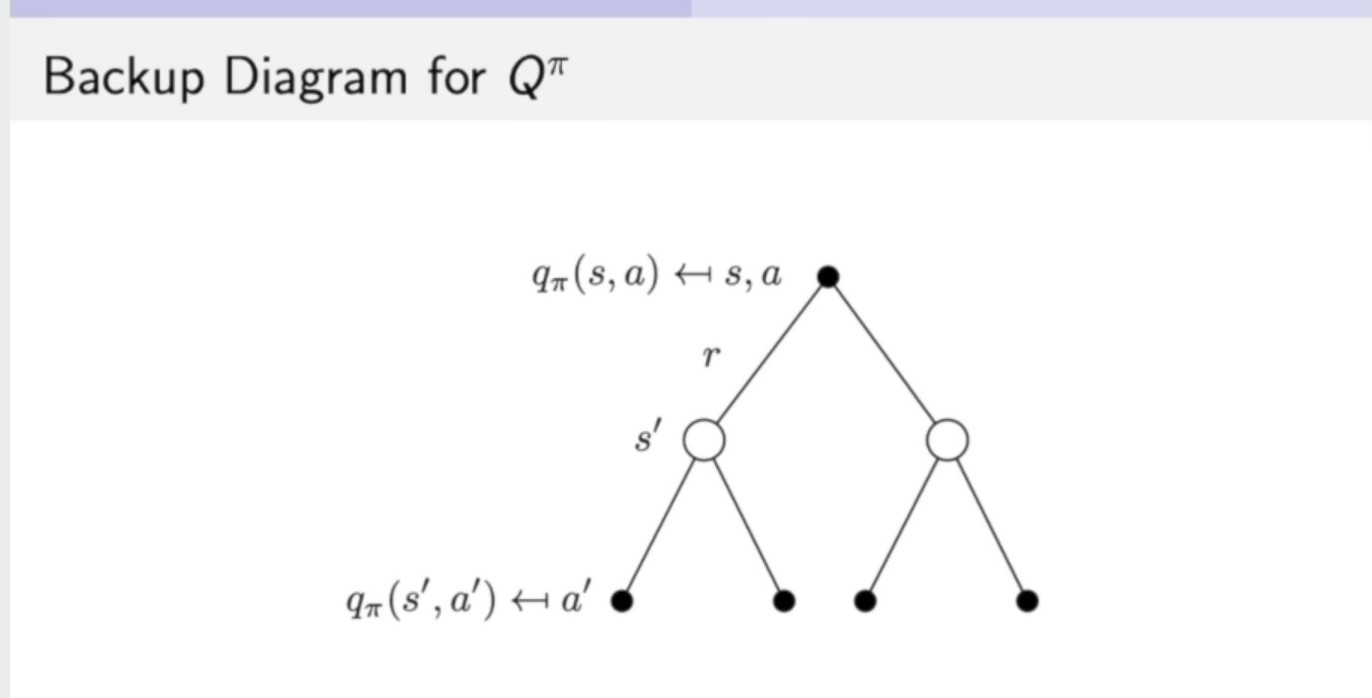
(3)式带入到(4)式中得到(象征着当前时刻的q函数与未来时刻的q函数之间的一个关联):
公式(5)进行backup后得到Bellman expectation backup:
上式转换成马尔可夫奖励过程的形式:
Bellman Optimality Equation:
(10)式带入到(9)式得到:
(9)式带入到(10)式得到:
公式(4)进行backup后得到 Bellman Optimality backup: