第三课:Model-free prediction和Model-free control
-
什么是MDP已知?:
- 马尔可夫决策过程中它的奖励 (R) 以及状态转移概率矩阵 (P) 都是暴露给agent的,就是环境是提前提供给你的,你是已知的。
- 所以我们能够用策略迭代的方法policy iteration和值迭代的方法value iteration来寻找最佳的策略
-
MDP,policy evalution,policy iteration和value iteration用来解决
已知MDP的环境 -
Model-free:就是
未知MDP的情况,agent通过跟环境进行交互,获得观测以及奖励,来调整自身的行为,通过一系列的观测收集到的数据,来调整自己的策略。Model-free并没有直接获取整个环境的转移状态以及奖励函数,而是通过agent跟环境进行交互,采集到了很多的轨迹数据,这些轨迹数据可以表征成({S_1,A_1,R_1,S_2,A_2,R_2,...,S_t,A_t,R_t})
agent就从这些轨迹当中获取信息,改进自己的策略,以达到获得更多奖励的一个目的。因为现实情况下MDP都没有现成的模型可以用,所以只能用model-free的办法(例如围棋,我们很难知道它的奖励 (R) 以及状态转移概率矩阵 (P) )。
-
Model-free prediction:在我们没法获取MDP模型的情况下,如果根据策略来估计它的价值,主要包含下面两种方法:
- 蒙特卡洛采样法(Monte Carlo policy evalution)
- 时序差分学习法(Temporal Difference (TD)learning)
-
Monte Carlo (MC) policy evalution:(只能用在一些有终止的马尔可夫决策过程)
-
算取每个轨迹获取的奖励过后,把很多轨迹的奖励进行一个平均,(例如求某个状态 (s) 的价值 (v(s)) ,计算所有的轨迹中状态 (s) 一共走过多少次,然后计算所有走过状态 (s) 的轨迹的一个奖励,所有的奖励之和来除以走过状态 (s) 的轨迹的条数,来取平均值),来估算每个状态下的价值,有了每个状态下的价值后,那么我们就可以知道在某个策略下它对应的价值了。
-
Monte Carlo (MC) policy evalution伪代码:To evalute state (v(s))
Every time-step (t) that state is visited in an episode
Increment counter (N(s) leftarrow N(s)+1)
Increment total return (S(s) leftarrow S(s)+G_t)
Value is estimated by mean return (v(s)=S(s)/N(s))
By law of large numbers, (v(s) ightarrow v^pi(s);as; N(s) ightarrow infty)
-
还有一个重要的公式:
[v(S_t) leftarrow v(S_t)+alpha [\,G_{i,t}-v(S_t)\,] ag 1 ] -
-
Temporal Difference (TD)learning:(在策略 (pi) 的经验下学习 (v_pi))
-
最简单的一种算法是
TD(0)算法:(estimated return也叫TD target)Update (v(S_t)) toward estimated return (R_{t+1}+gamma v(S_{t+1}))
(v(S_t) leftarrow v(S_t)+alpha(R_{t+1}+gamma v(S_{t+1})-v(S_t)))
-
TD target:(R_{t+1}+gamma v(S_{t+1})) -
TD error:(delta _t=R_{t+1}+gamma v(S_{t+1})-v(S_t))
-
-
蒙特卡洛采样法(MC)和时序差分学习法(TD)的区别:
- 蒙特卡洛采样法中 (G_t) 是一个实际得到的值,因为它把一条轨迹都跑完了,然后回来计算每个状态下的价值函数是多少;但是对于 TD learning 来说是没有等整条轨迹走完,向前走一步过后,就开始利用TD target来更新价值函数。
- TD能够在每一步过后,即时的学习,MC必须等到整个episode结束,才能知道奖励,才能进行学习。
- TD可以从不完整的序列上进行学习,MC只能从完整的序列进行学习。
- TD可以在连续环境(没有终止条件)下面进行学习,MC必须要在有终止的环境下学习。
- TD是假设了一个马尔科夫特征,所以TD在马尔可夫环境下具有更高的学习效率,MC并没有这个假设,并没有说当前状态跟之前状态是没有关系的,MC是用实际采样得到这个价值,来估计中间每个状态的价值。所以MC可能在不是马尔可夫的环境下更加的高效。
-
n-step TD
-
例如3-step TD的话,就是向前走三步,然后走三步过后,最前边那个state,利用3步得到的奖励来更新 (v(s))
(n=1(TD)) (G_t^{(1)}=R_{t+1}+gamma v(S_{t+1}))
(n=2) (G_t^{(2)}=R_{t+1}+gamma R_{t+2}+gamma^2 v(S_{t+2}))
(cdots)
(n=infty (MC)) (G_t^{infty}=R_{t+1}+gamma R_{t+2}+cdots +gamma^{T-t-1}R_T)
-
n-step return定义为如下:
[G_t^n=R_{t+1}+gamma R_{t+2}+ cdots +gamma^{n-1} R_{t+n}+gamma^nv(S_{t+n}) ] -
n-step TD:
[v(S_t) leftarrow v(S_t)+alpha(G_t^n-v(S_t)) ]
-
-
Bootstrapping and Sampling for DP,MC,and TD
- Bootstrapping:update involves an estimate
- MC does not bootstrap
- DP bootstraps
- TD bootstraps
- Sampling:update samples an expectation
- MC samples
- DP does not sample
- TD samples
- TD相当于是MC和DP的结合
- Bootstrapping:update involves an estimate
-
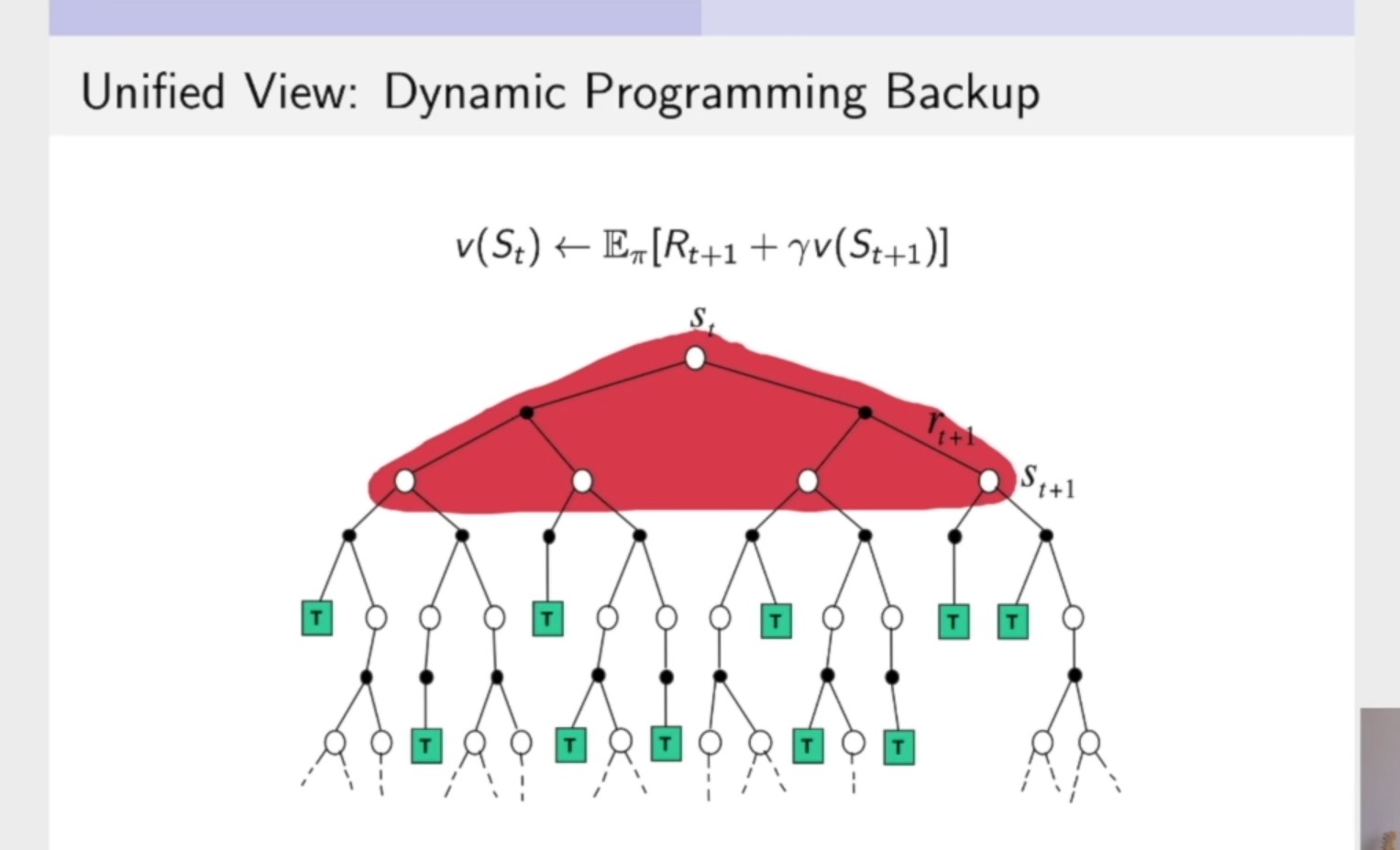
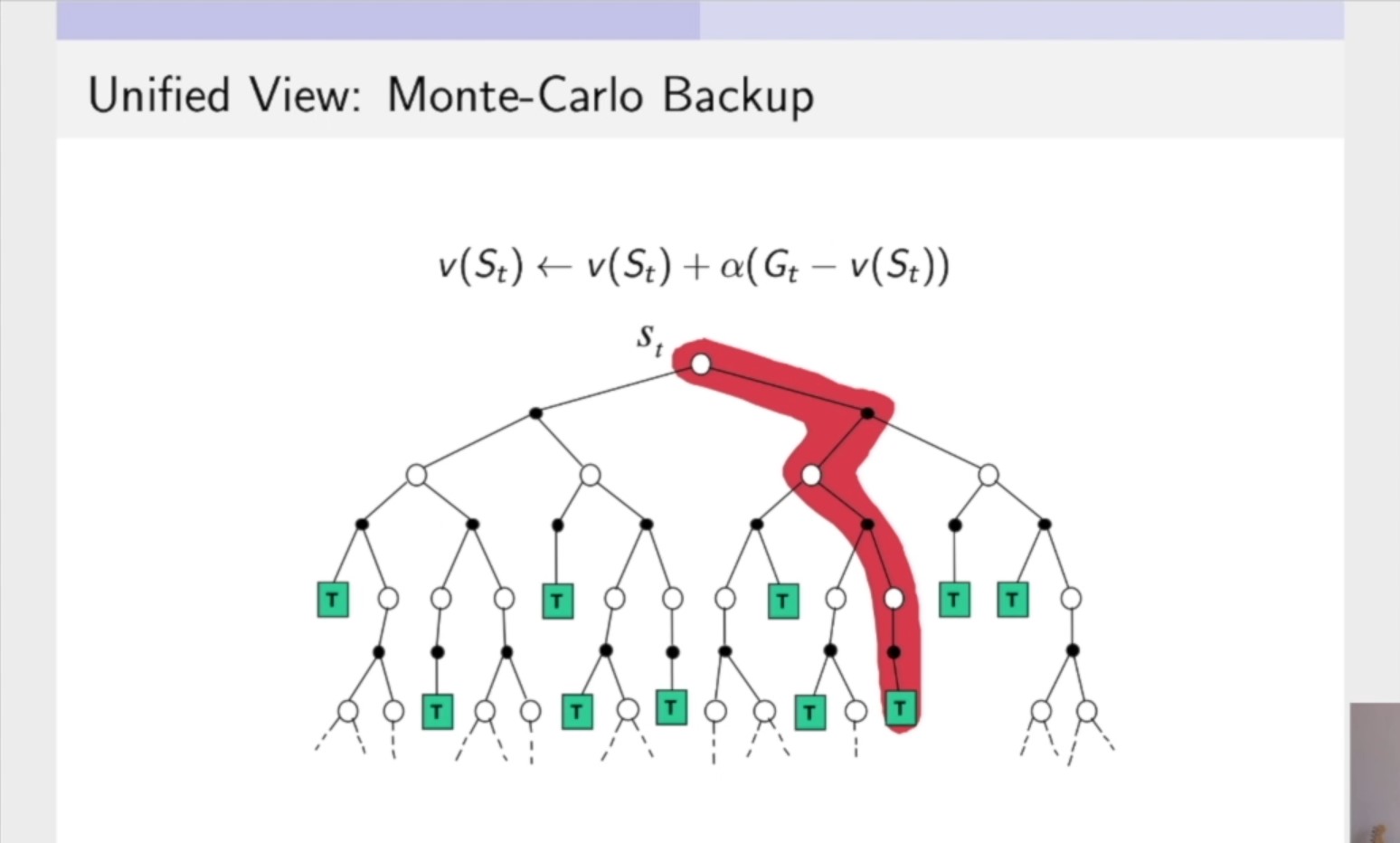
Bootstrapping and Sampling for DP,MC,and TD的可视化(图片来自b站周博磊老师的强化学习纲要教学视频)
- 动态规划,就是把所有的未来与当前状态相关联一步的状态都计算出来,把它加和起来,所以我们求解 (v(S_t)) 就是把红色区域的部分全部求解出来,累加得到值。
- 蒙特卡洛:在一个轨迹上进行更新,更新这个轨迹上的所有状态。
- 时序差分:TD(0)只向前走一步,实际到达的那个状态,在下一个状态然后进行bootstrap,得到 TD error,然后跟它实际得到的奖励进行加和起来。

-
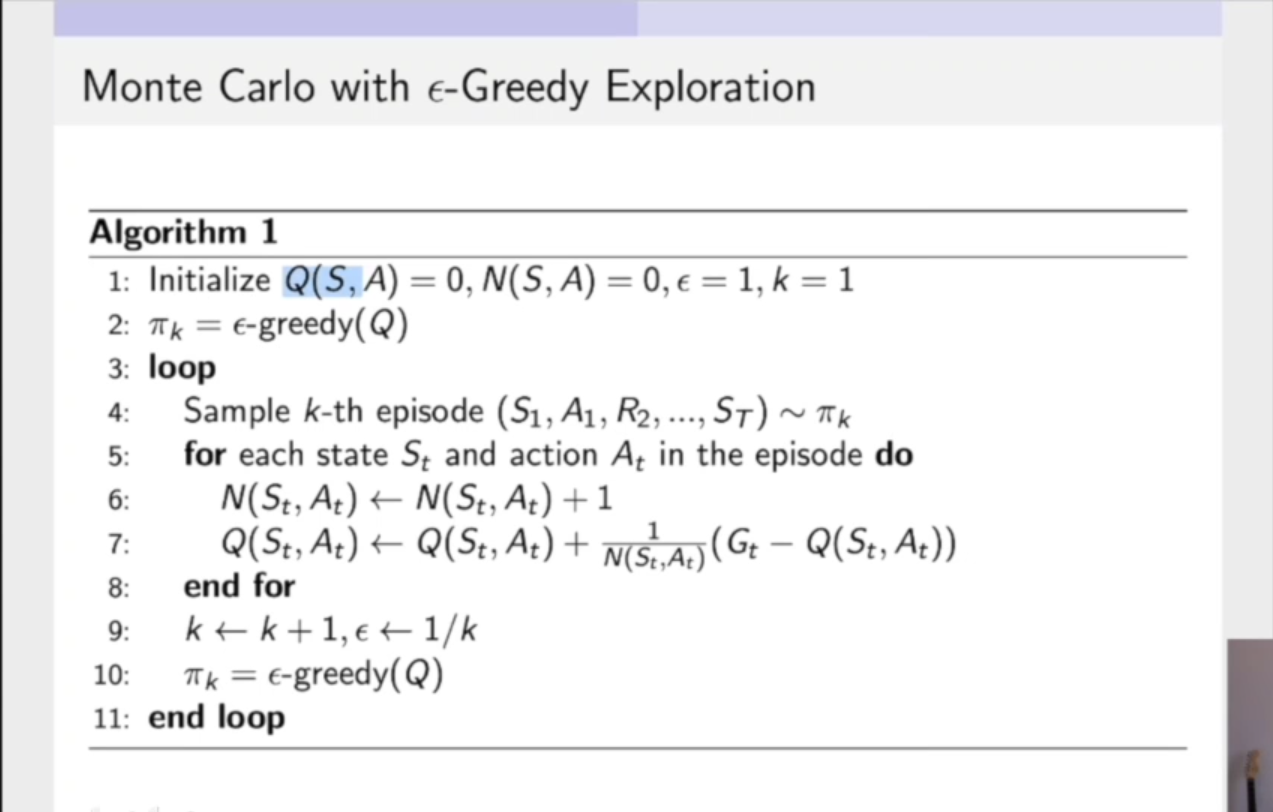
使用 (epsilon-Greedy) 探索的蒙特卡洛方法:
- ①:初始化 (Q(S,A)) 表格,等参数(第一行)。②:利用当前的策略,进行随机探索,得到一些轨迹。(第四行)③:有这些轨迹过后,开始更新 (Q(S,A)) (第七行)④:进一步更新自己的策略,得到下一阶段的策略,再利用下一阶段更好的策略进行数据的采集。(第十行)
-
Sarsa:On-Policy TD Control
- on-policy:我们只有同一个policy,即利用这个policy采集数据,也是对这个policy进行优化。
- 一步 (epsilon-greedy) policy,然后bootstrap动作价值函数。:
[Q(S_t,A_t) leftarrow Q(S_t,A_t)+alpha \,[R_{t+1}+gamma Q(S_{t+1},A_{t+1})-Q(S_t,A_t)\,] ]- Sarsa的伪代码如下
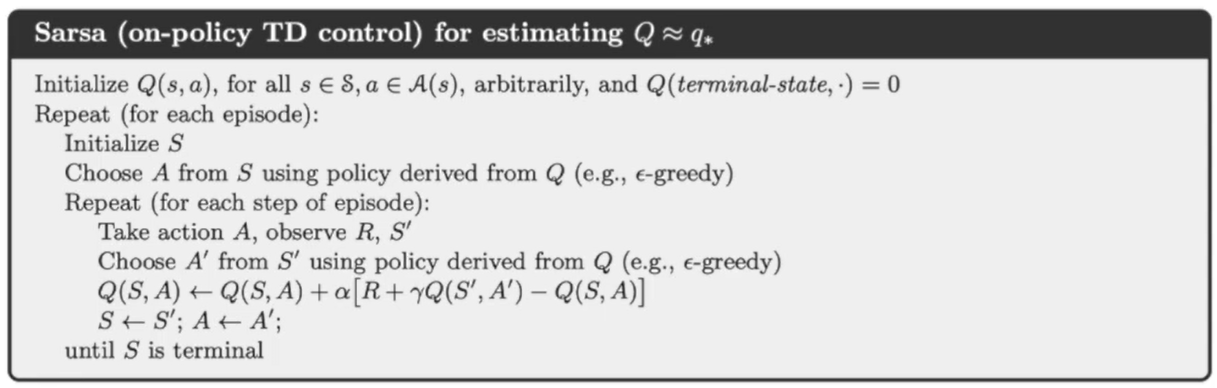
- ①:初始化Q表格 (Q(S,A)) 。②:根据当前的策略进行采样,通过Q表格 (Q(S,A)) 采样一个 (A),就得到了第一个 (A)。③:采取action就会得到奖励 (R) 和下一个状态 (S') 。④:再一次通过 Q表格 (Q(S,A)) 进行采样得到 (A') 。⑤:收集到所有的数据过后,我们就可以用来更新Q表格 (Q(S,A)) 。⑥:更新过后,就会向前走一步,(S leftarrow S';A leftarrow A')。
-
Q-learning:Off-Policy Control
-
我们让target policy和behavior policy一起提升
-
target policy:在Q table上直接greedy(贪婪的,就是直接选取收益最大的action)选取一个action
[pi (S_{t+1})=arg\,max_{a'}Q(S_{t+1},a') ] -
behavior policy可以是一个完全的随机的policy,但是我们采取的是 (epsilon-greedy) ,(刚开始随机性是很高的,然后慢慢的降低)
-
因此Q-learning target:
[R_{t+1}+gamma Q(S_{t+1},A')=R_{t+1}+gamma Q(S_{t+1},arg\,max_{a'}Q(S_{t+1},a'))\ =R_{t+1}+gamma \,max_{a'} Q(S_{t+1,a'}) ] -
因此Q-learning update:
[Q(S_t,A_t) leftarrow Q(S_t,A_t)+alpha\, [R_{t+1}+gamma \,max_{a}Q(S_{t+1},a)-Q(S_t,A_t)] ] -
Q-learning伪代码如下:
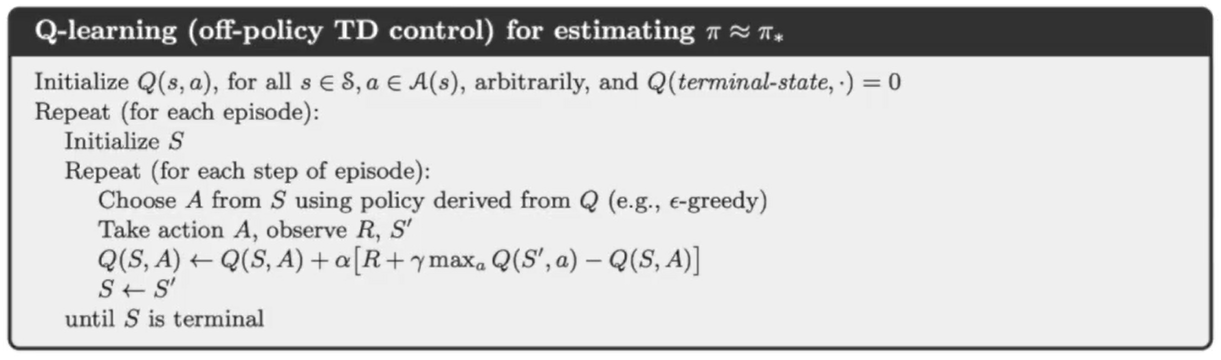
-
这里跟Sarsa算法很大不同的是:对第二个action的采样,在Sarsa中我们要根据target policy进行两次对action的采样。在Q-learning中第一个采样我们是用behavior policy采样出来的,我们并没有采样第二个action,而是在Q table中取一个收益max的action。然后我们对Q table进行更新,然后当前的状态进入到下一个状态。
-
-
On-policy Learning vs. Off-policy Learning
- On-policy Learning就是我们的目的是学到最佳策略,在学习过程中我们只利用一种策略,既利用这个策略进行轨迹的采集,也进一步进行策略的优化,都是用的同一个策略。例子: (epsilon-greedy)
- Off-poilcy Learning就是我们在策略的学习过程中保留两种不同的策略。第一个策略是我们进行优化的策略,是希望学到最佳的策略。另外一个策略是我们用来探索的策略,因为是用来探索的策略,所以我们可以让这个策略更加的激进对环境进行探索。所以我们学习的是
target policy:π,但是我们利用的数据,采集到的轨迹是用第二个策略behavior policy:μ产生。
-
Off-policy Learning的好处
- 因为可以利用一个更加激进的behavior policy,所以我们可以学到一个更加优化的策略。
- 可以从其他的数据中进行学习,因为这些轨迹可能是人,或者其他agent产生的,那么就可以进行一个模仿学习。
- 我们可以反复利用一些老的策略产生的轨迹。因为探索轨迹的过程中,我们要用到很多的计算机资源,如果我们之前产生的轨迹,对于我们现在优化的轨迹不能利用的话,这样就浪费了很多资源。
-
周博磊老师在GitHub上提供的源码:https://github.com/cuhkrlcourse/RLexample