KNN是数据挖掘中一种简单算法常用来分类,此次用来聚类实现对4种花的简单识别。
环境:python2.7+opencv3.0+windows10
原理:在使用KNN函数提取出4种花特征点以后,对需要辨认的图片提取体征点,与图库中4类花进行比较,匹配点最多的一类即视为同类。
代码:
读入图像数据:
1 2 img =cv2.imread(name) 3 4 q_img=[1]*10 5 q_img[0] = cv2.imread("images/qiangwei1.jpg") 6 q_img[1] = cv2.imread("images/qiangwei2.jpg") 7 q_img[2] = cv2.imread("images/qiangwei3.jpg") 8 q_img[3] = cv2.imread("images/qiangwei4.jpg") 9 q_img[4] = cv2.imread("images/qiangwei5.jpg") 10 11 x_img=[1]*10 12 x_img[0] = cv2.imread("images/xinghua1.jpg") 13 x_img[1] = cv2.imread("images/xinghua2.jpg") 14 x_img[2] = cv2.imread("images/xinghua3.jpg") 15 x_img[3] = cv2.imread("images/xinghua4.jpg") 16 x_img[4] = cv2.imread("images/xinghua5.jpg") 17 18 t_img=[1]*10 19 t_img[0] = cv2.imread("images/taohua1.jpg") 20 t_img[1] = cv2.imread("images/taohua2.jpg") 21 t_img[2] = cv2.imread("images/taohua3.jpg") 22 t_img[3] = cv2.imread("images/taohua4.jpg") 23 t_img[4] = cv2.imread("images/taohua5.jpg") 24 25 y_img=[1]*10 26 y_img[0] = cv2.imread("images/yinghua1.jpg") 27 y_img[1] = cv2.imread("images/yinghua2.jpg") 28 y_img[2] = cv2.imread("images/yinghua3.jpg") 29 y_img[3] = cv2.imread("images/yinghua4.jpg") 30 y_img[4] = cv2.imread("images/yinghua5.jpg")
获取灰度图:
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) q_gray=[1]*10 q_gray[0] = cv2.cvtColor(q_img[0],cv2.COLOR_BGR2GRAY) q_gray[1] = cv2.cvtColor(q_img[1],cv2.COLOR_BGR2GRAY) q_gray[2] = cv2.cvtColor(q_img[2],cv2.COLOR_BGR2GRAY) q_gray[3] = cv2.cvtColor(q_img[3],cv2.COLOR_BGR2GRAY) q_gray[4] = cv2.cvtColor(q_img[4],cv2.COLOR_BGR2GRAY) x_gray=[1]*10 x_gray[0] = cv2.cvtColor(x_img[0],cv2.COLOR_BGR2GRAY) x_gray[1] = cv2.cvtColor(x_img[1],cv2.COLOR_BGR2GRAY) x_gray[2] = cv2.cvtColor(x_img[2],cv2.COLOR_BGR2GRAY) x_gray[3] = cv2.cvtColor(x_img[3],cv2.COLOR_BGR2GRAY) x_gray[4] = cv2.cvtColor(x_img[4],cv2.COLOR_BGR2GRAY) t_gray=[1]*10 t_gray[0] = cv2.cvtColor(t_img[0],cv2.COLOR_BGR2GRAY) t_gray[1] = cv2.cvtColor(t_img[1],cv2.COLOR_BGR2GRAY) t_gray[2] = cv2.cvtColor(t_img[2],cv2.COLOR_BGR2GRAY) t_gray[3] = cv2.cvtColor(t_img[3],cv2.COLOR_BGR2GRAY) t_gray[4] = cv2.cvtColor(t_img[4],cv2.COLOR_BGR2GRAY) y_gray=[1]*10 y_gray[0] = cv2.cvtColor(y_img[0],cv2.COLOR_BGR2GRAY) y_gray[1] = cv2.cvtColor(y_img[1],cv2.COLOR_BGR2GRAY) y_gray[2] = cv2.cvtColor(y_img[2],cv2.COLOR_BGR2GRAY) y_gray[3] = cv2.cvtColor(y_img[3],cv2.COLOR_BGR2GRAY) y_gray[4] = cv2.cvtColor(y_img[4],cv2.COLOR_BGR2GRAY)
获取keypoints,descriptor:
detect = cv2.xfeatures2d.SIFT_create(800) kp,des = detect.detectAndCompute(gray,None) q_kp=[1]*10 q_des=[1]*10 q_kp[0],q_des[0] = detect.detectAndCompute(q_gray[0],None) q_kp[1],q_des[1] = detect.detectAndCompute(q_gray[1],None) q_kp[2],q_des[2] = detect.detectAndCompute(q_gray[2],None) q_kp[3],q_des[3] = detect.detectAndCompute(q_gray[3],None) q_kp[4],q_des[4] = detect.detectAndCompute(q_gray[4],None) x_kp=[1]*10 x_des=[1]*10 x_kp[0],x_des[0] = detect.detectAndCompute(x_gray[0],None) x_kp[1],x_des[1] = detect.detectAndCompute(x_gray[1],None) x_kp[2],x_des[2] = detect.detectAndCompute(x_gray[2],None) x_kp[3],x_des[3] = detect.detectAndCompute(x_gray[3],None) x_kp[4],x_des[4] = detect.detectAndCompute(x_gray[4],None) t_kp=[1]*10 t_des=[1]*10 t_kp[0],t_des[0] = detect.detectAndCompute(t_gray[0],None) t_kp[1],t_des[1] = detect.detectAndCompute(t_gray[1],None) t_kp[2],t_des[2] = detect.detectAndCompute(t_gray[2],None) t_kp[3],t_des[3] = detect.detectAndCompute(t_gray[3],None) t_kp[4],t_des[4] = detect.detectAndCompute(t_gray[4],None) y_kp=[1]*10 y_des=[1]*10 y_kp[0],y_des[0] = detect.detectAndCompute(y_gray[0],None) y_kp[1],y_des[1] = detect.detectAndCompute(y_gray[1],None) y_kp[2],y_des[2] = detect.detectAndCompute(y_gray[2],None) y_kp[3],y_des[3] = detect.detectAndCompute(y_gray[3],None) y_kp[3],y_des[4] = detect.detectAndCompute(y_gray[4],None)
使用Knn匹配类进行匹配:
bf = cv2.BFMatcher() q_matches=[1]*10 q_matches[0]= bf.knnMatch(des,q_des[0],k=2) q_matches[1]= bf.knnMatch(des,q_des[1],k=2) q_matches[2]= bf.knnMatch(des,q_des[2],k=2) q_matches[3]= bf.knnMatch(des,q_des[3],k=2) q_matches[4]= bf.knnMatch(des,q_des[4],k=2) x_matches=[1]*10 x_matches[0]= bf.knnMatch(des,x_des[0],k=2) x_matches[1]= bf.knnMatch(des,x_des[1],k=2) x_matches[2]= bf.knnMatch(des,x_des[2],k=2) x_matches[3]= bf.knnMatch(des,x_des[3],k=2) x_matches[4]= bf.knnMatch(des,x_des[4],k=2) t_matches=[1]*10 t_matches[0]= bf.knnMatch(des,t_des[0],k=2) t_matches[1]= bf.knnMatch(des,t_des[1],k=2) t_matches[2]= bf.knnMatch(des,t_des[2],k=2) t_matches[3]= bf.knnMatch(des,t_des[3],k=2) t_matches[4]= bf.knnMatch(des,t_des[4],k=2) y_matches=[1]*10 y_matches[0]= bf.knnMatch(des,y_des[0],k=2) y_matches[1]= bf.knnMatch(des,y_des[1],k=2) y_matches[2]= bf.knnMatch(des,y_des[2],k=2) y_matches[3]= bf.knnMatch(des,y_des[3],k=2) y_matches[4]= bf.knnMatch(des,y_des[4],k=2)
记录并对匹配点进行筛选:
sum1=0 sum2=0 sum3=0 sum4=0 for i in range(5): for m,n in q_matches[i]: if m.distance < 0.55*n.distance: sum1=sum1+1 for i in range(5): for m,n in x_matches[i]: if m.distance < 0.55*n.distance: sum2=sum2+1 for i in range(5): for m,n in t_matches[i]: if m.distance < 0.55*n.distance: sum3=sum3+1 for i in range(5): for m,n in y_matches[i]: if m.distance < 0.55*n.distance: sum4=sum4+1
返回结果:
if max(sum1,sum2,sum3,sum4)==sum1: return "蔷薇" if max(sum1,sum2,sum3,sum4)==sum2: return "杏花" if max(sum1,sum2,sum3,sum4)==sum3: return "桃花" if max(sum1,sum2,sum3,sum4)==sum4: return "樱花"
gui使用利用wxformbuilder+wxpython开发的简单页面
最终文件:
效果图如下:

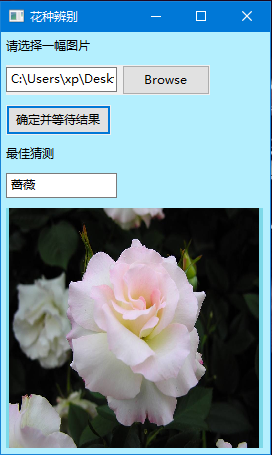
由于图库图片较少且算法较为简单,识别率不会很高。