在下载到开发板之前要选择好板和端口,具体参见:
ZYAR20A 亚克力2驱 蓝牙 298寻迹避障机器人 —— Arduino相关设置
注意
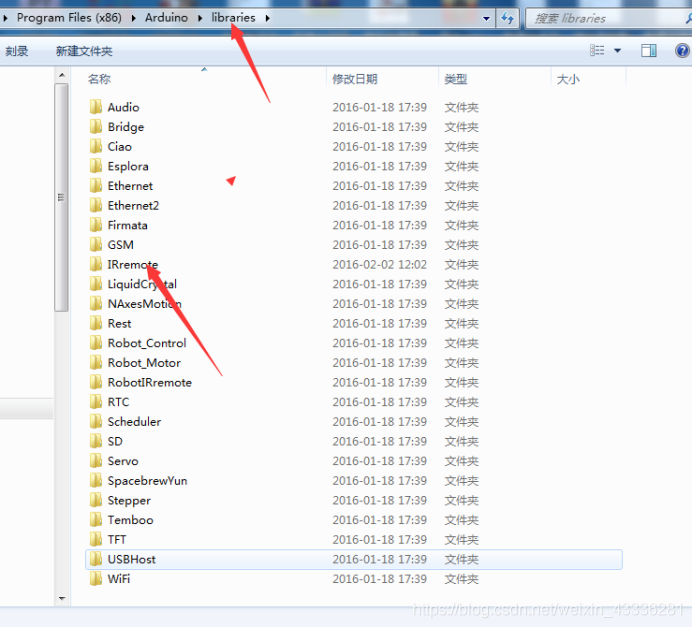
红外遥控程序注意将IRremote 复制到ARDuino安装目录下面,否则编译会出现
链接:https://pan.baidu.com/s/1H7K2hdorQMiAOaZLz13qJw
提取码:ilmt
C:\Program Files (x86)\Arduino\libraries\RobotIRremote\src\IRremoteTools.cpp:5:16: error: ‘TKD2’ was not declared in this scope int RECV_PIN = TKD2; // the pin the IR receiver is connected to ^编译有误。
Arduino遥控器按键表

代码
// 智能小车红外遥控实验
// 实验中所用接收红外信号为配送遥控器的信号,也可打印出信号数值,配合其他红外信号控制
// 本实验不可调节电机速度,调节pwm值会影响红外的信号接收
//=============================================================================
#include <IRremote.h>//包含红外库 关键点
int RECV_PIN = A4;//端口声明
IRrecv irrecv(RECV_PIN);
decode_results results;//结构声明
int on = 0;//标志位
unsigned long last = millis();
long run_car = 0x00FF629D;//按键CH
long back_car = 0x00FFA857;//按键+
long left_car = 0x00FF22DD;//按键<<
long right_car = 0x00FFC23D;//按键>||
long stop_car = 0x00FF02FD;//按键>>|
long left_turn = 0x00ffE01F;//按键-
long right_turn = 0x00FF906F;//按键EQ
//==============================
int Left_motor_go=8; //左电机前进(IN1)
int Left_motor_back=9; //左电机后退(IN2)
int Right_motor_go=10; // 右电机前进(IN3)
int Right_motor_back=11; // 右电机后退(IN4)
void setup()
{
//初始化电机驱动IO为输出方式
pinMode(Left_motor_go,OUTPUT); // PIN 8 (PWM)
pinMode(Left_motor_back,OUTPUT); // PIN 9 (PWM)
pinMode(Right_motor_go,OUTPUT);// PIN 10 (PWM)
pinMode(Right_motor_back,OUTPUT);// PIN 11 (PWM)
pinMode(13, OUTPUT);////端口模式,输出
Serial.begin(9600); //波特率9600
irrecv.enableIRIn(); // Start the receiver
}
void run() // 前进
{
digitalWrite(Right_motor_go,HIGH); // 右电机前进
digitalWrite(Right_motor_back,LOW);
//analogWrite(Right_motor_go,200);//PWM比例0~255调速,左右轮差异略增减
//analogWrite(Right_motor_back,0);
digitalWrite(Left_motor_go,LOW); // 左电机前进
digitalWrite(Left_motor_back,HIGH);
//analogWrite(Left_motor_go,0);//PWM比例0~255调速,左右轮差异略增减
//analogWrite(Left_motor_back,200);
//delay(time * 100); //执行时间,可以调整
}
void brake() //刹车,停车
{
digitalWrite(Right_motor_go,LOW);
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,LOW);
digitalWrite(Left_motor_back,LOW);
//delay(time * 100);//执行时间,可以调整
}
void left() //左转(左轮不动,右轮前进)
{
digitalWrite(Right_motor_go,HIGH); // 右电机前进
digitalWrite(Right_motor_back,LOW);
//analogWrite(Right_motor_go,200);
//analogWrite(Right_motor_back,0);//PWM比例0~255调速
digitalWrite(Left_motor_go,LOW); //左轮后退
digitalWrite(Left_motor_back,LOW);
//analogWrite(Left_motor_go,0);
//analogWrite(Left_motor_back,0);//PWM比例0~255调速
//delay(time * 100); //执行时间,可以调整
}
void spin_left() //左转(左轮后退,右轮前进)
{
digitalWrite(Right_motor_go,HIGH); // 右电机前进
digitalWrite(Right_motor_back,LOW);
//analogWrite(Right_motor_go,200);
//analogWrite(Right_motor_back,0);//PWM比例0~255调速
digitalWrite(Left_motor_go,HIGH); //左轮后退
digitalWrite(Left_motor_back,LOW);
//analogWrite(Left_motor_go,200);
//analogWrite(Left_motor_back,0);//PWM比例0~255调速
//delay(time * 100); //执行时间,可以调整
}
void right() //右转(右轮不动,左轮前进)
{
digitalWrite(Right_motor_go,LOW); //右电机后退
digitalWrite(Right_motor_back,LOW);
//analogWrite(Right_motor_go,0);
//analogWrite(Right_motor_back,0);//PWM比例0~255调速
digitalWrite(Left_motor_go,LOW);//左电机前进
digitalWrite(Left_motor_back,HIGH);
//analogWrite(Left_motor_go,0);
// analogWrite(Left_motor_back,200);//PWM比例0~255调速
// delay(time * 100); //执行时间,可以调整
}
void spin_right() //右转(右轮后退,左轮前进)
{
digitalWrite(Right_motor_go,LOW); //右电机后退
digitalWrite(Right_motor_back,HIGH);
//analogWrite(Right_motor_go,0);
//analogWrite(Right_motor_back,200);//PWM比例0~255调速
digitalWrite(Left_motor_go,LOW);//左电机前进
digitalWrite(Left_motor_back,HIGH);
//analogWrite(Left_motor_go,0);
//analogWrite(Left_motor_back,200);//PWM比例0~255调速
//delay(time * 100); //执行时间,可以调整
}
void back() //后退
{
digitalWrite(Right_motor_go,LOW); //右轮后退
digitalWrite(Right_motor_back,HIGH);
//analogWrite(Right_motor_go,0);
//analogWrite(Right_motor_back,150);//PWM比例0~255调速
digitalWrite(Left_motor_go,HIGH); //左轮后退
digitalWrite(Left_motor_back,LOW);
//analogWrite(Left_motor_go,150);
//analogWrite(Left_motor_back,0);//PWM比例0~255调速
//delay(time * 100); //执行时间,可以调整
}
void dump(decode_results *results)
{
int count = results->rawlen;
if (results->decode_type == UNKNOWN)
{
//Serial.println("Could not decode message");
brake();
}
//串口打印,调试时可以打开,实际运行中会影响反应速度,建议屏蔽
/*
else
{
if (results->decode_type == NEC)
{
Serial.print("Decoded NEC: ");
}
else if (results->decode_type == SONY)
{
Serial.print("Decoded SONY: ");
}
else if (results->decode_type == RC5)
{
Serial.print("Decoded RC5: ");
}
else if (results->decode_type == RC6)
{
Serial.print("Decoded RC6: ");
}
Serial.print(results->value, HEX);
Serial.print(" (");
Serial.print(results->bits, DEC);
Serial.println(" bits)");
}
Serial.print("Raw (");
Serial.print(count, DEC);
Serial.print("): ");
for (int i = 0; i < count; i++)
{
if ((i % 2) == 1)
{
Serial.print(results->rawbuf[i]*USECPERTICK, DEC);
}
else
{
Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC);
}
Serial.print(" ");
}
Serial.println("");
*/
}
void loop()
{
if (irrecv.decode(&results)) //调用库函数:解码
{
// If it's been at least 1/4 second since the last
// IR received, toggle the relay
if (millis() - last > 250) //确定接收到信号
{
on = !on;//标志位置反
digitalWrite(13, on ? HIGH : LOW);//板子上接收到信号闪烁一下led
dump(&results);//解码红外信号
}
if (results.value == run_car )//按键CH
run();//前进
if (results.value == back_car )//按键+
back();//后退
if (results.value == left_car )//按键<<
left();//左转
if (results.value == right_car )//按键>||
right();//右转
if (results.value == stop_car )//按键>>|
brake();//停车
if (results.value == left_turn )//按键-
spin_left();//左旋转
if (results.value == right_turn )//按键EQ
spin_right();//右旋转
last = millis();
irrecv.resume(); // Receive the next value
}
}