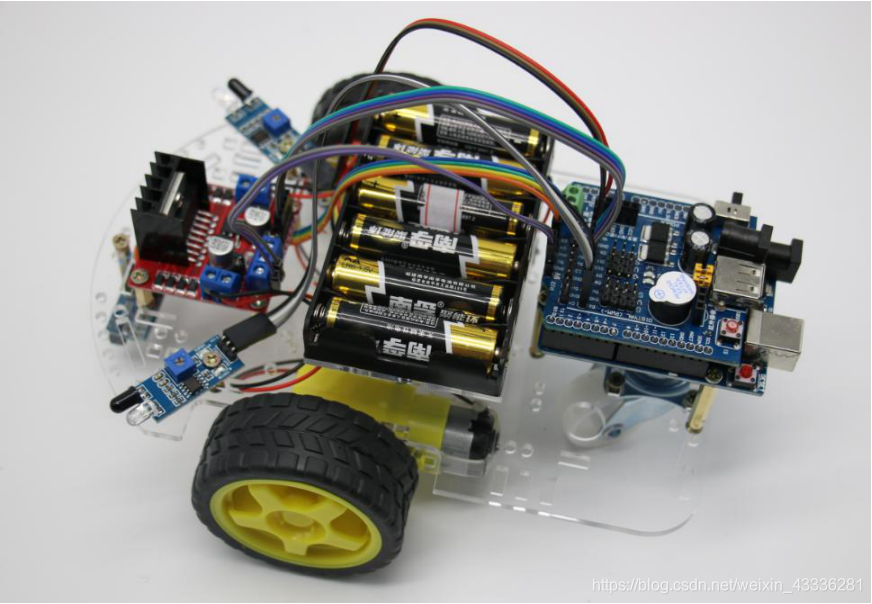
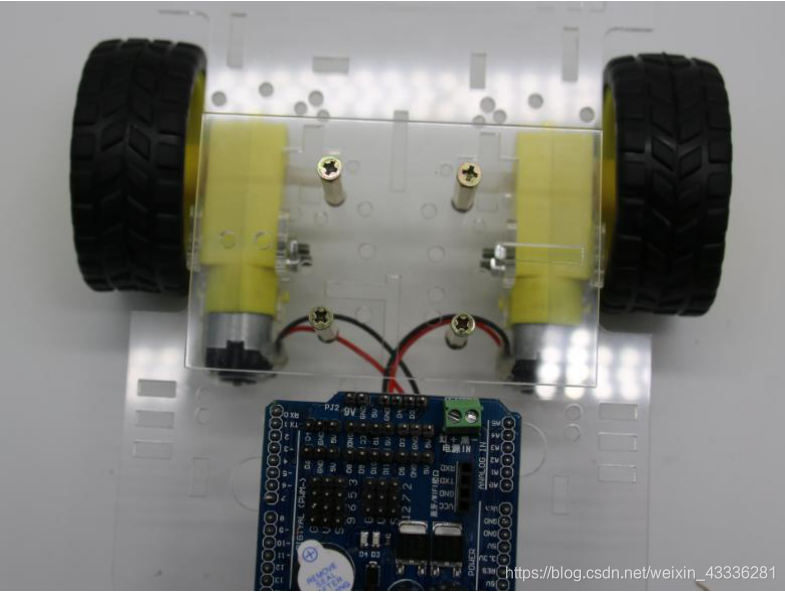
整体效果图
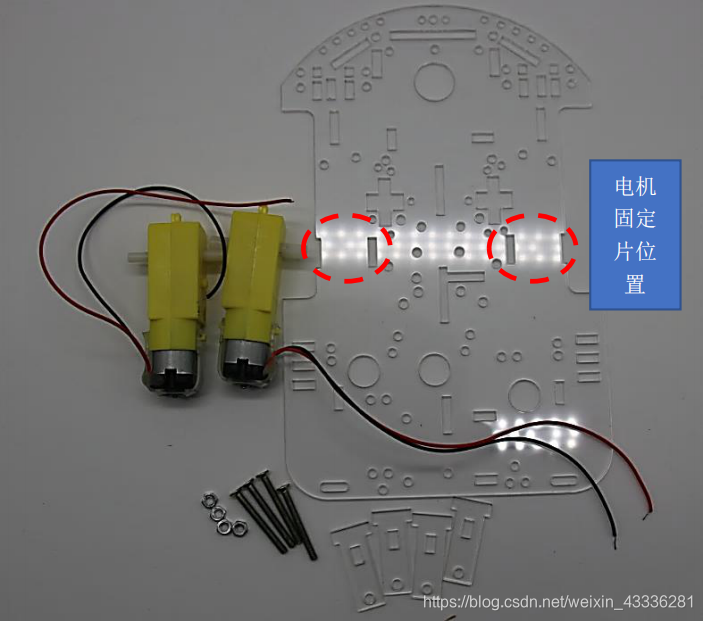
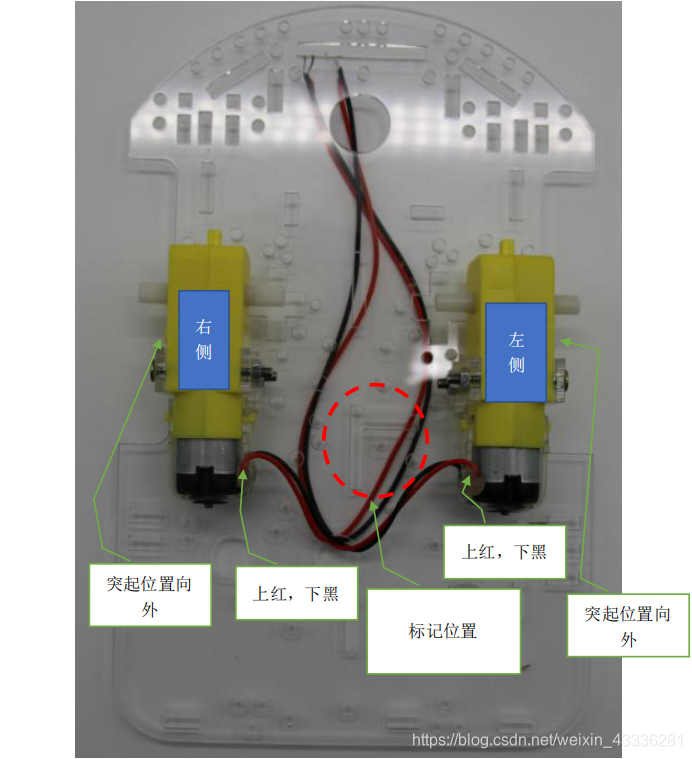
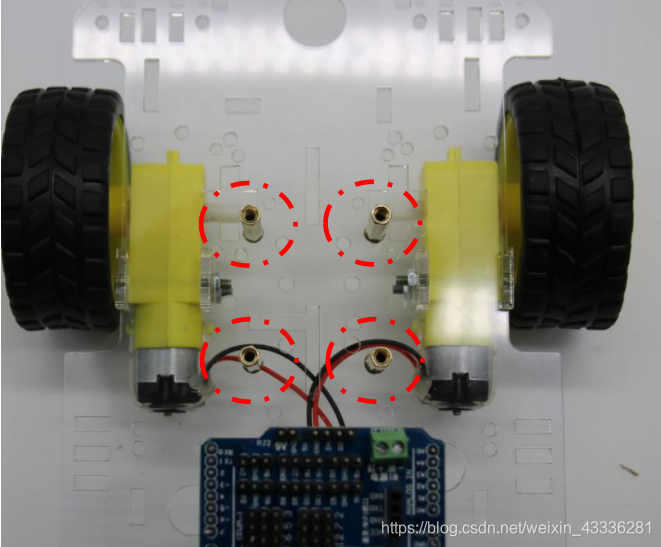
底盘的安装
零件
(1)智能机器人底盘 颜色可选 1 块
(2)亚克力电机固定片 4 片
(3)双轴直流减速电机 2 个
(4)65MM 橡胶轮子 2 个
(5)M3×30 螺丝 4 个
(6)M3 螺帽 10 个
(7)M3×8 螺丝 4 个
(8)支撑万向轮 1 个
(7)工具:螺丝刀 1 把
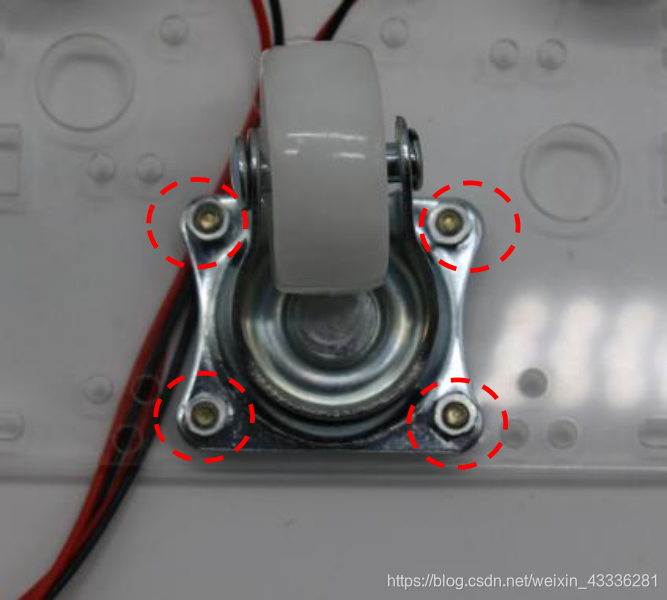
安装支撑轮
零件
M3×8 螺丝
M3 螺帽固定支撑轮

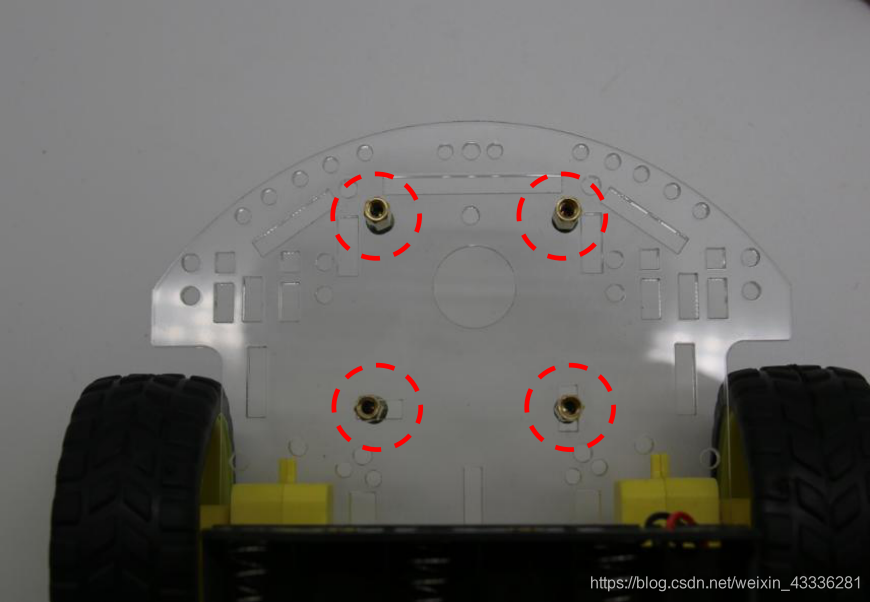
安装 arduino Uno 主控板
零件
(1)智能机器人底盘 颜色可选 1 块
(2)arduino Uno 1 块
(3)M3×8 螺丝 8 个
(4)M3×25 通孔铜柱 4 个
(5)工具:螺丝刀 1


安装功能转接板
零件
(1)智能机器人 1 台
(2)arduino Uno 功能转接板 1 块
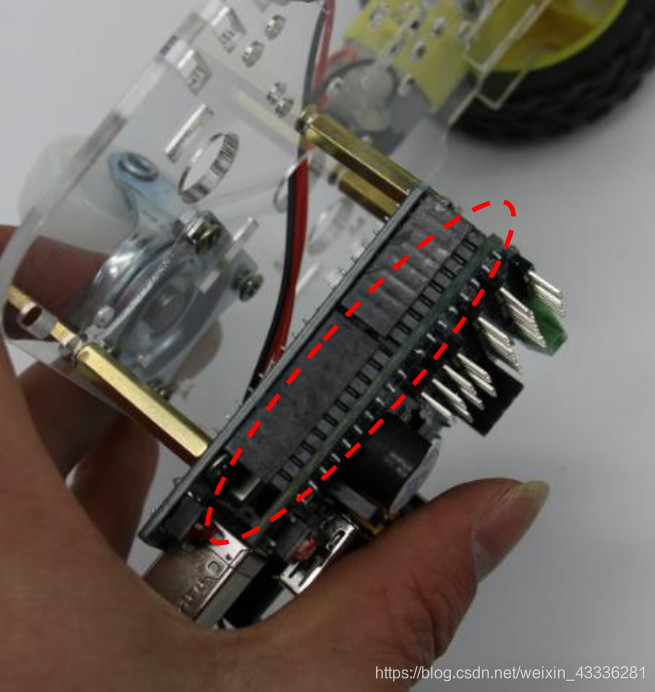
注意功能转接板和主控板安装方向:
1、 仔细检查功能转接板和主控板的安装方向是否一致。
2、 注意检查所有针脚是否和主控板上的排孔一一对齐。
这两点必须反复检查,不然等上电测试会造成电路短路,带来不必要的后果
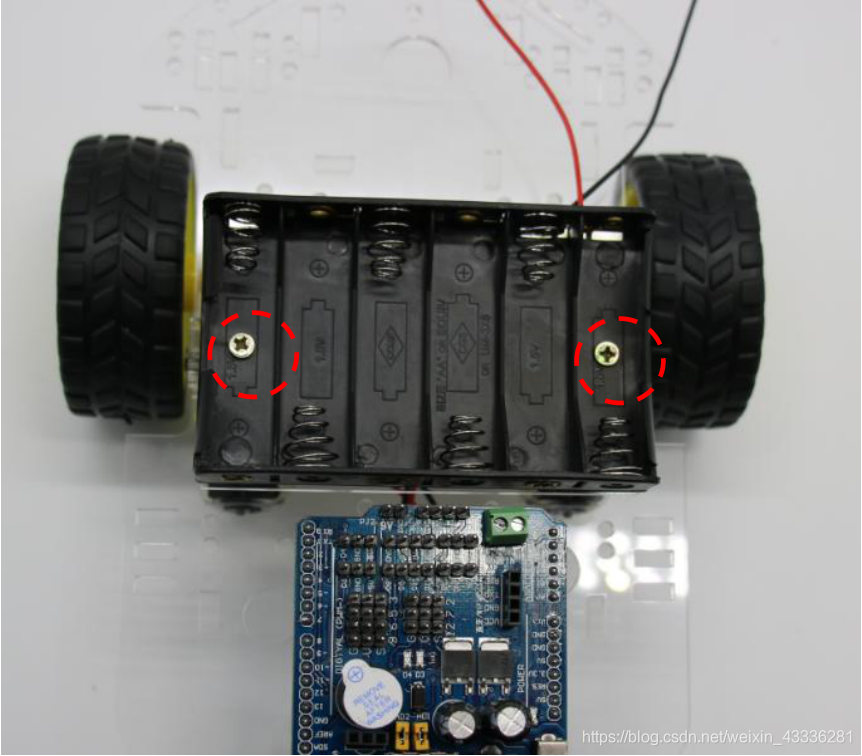
安装电池盒
零件
(1)智能机器人 1 台
(2)6 节电池盒 1 块
(3)M3×25 通孔铜柱 4 个
(4)M3×10 螺丝 10 个
(5)电池盒转接板 1 个
(6)M3 螺母 2 个
(6)工具:螺丝刀 1 把
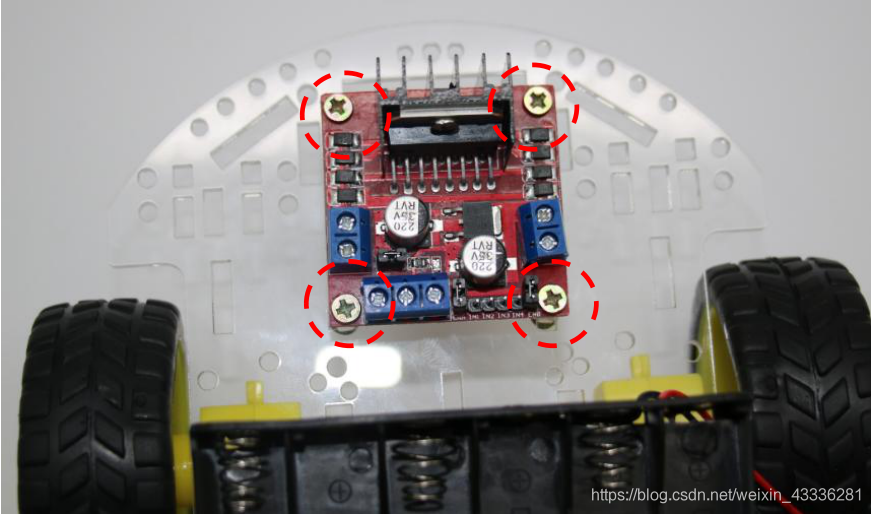
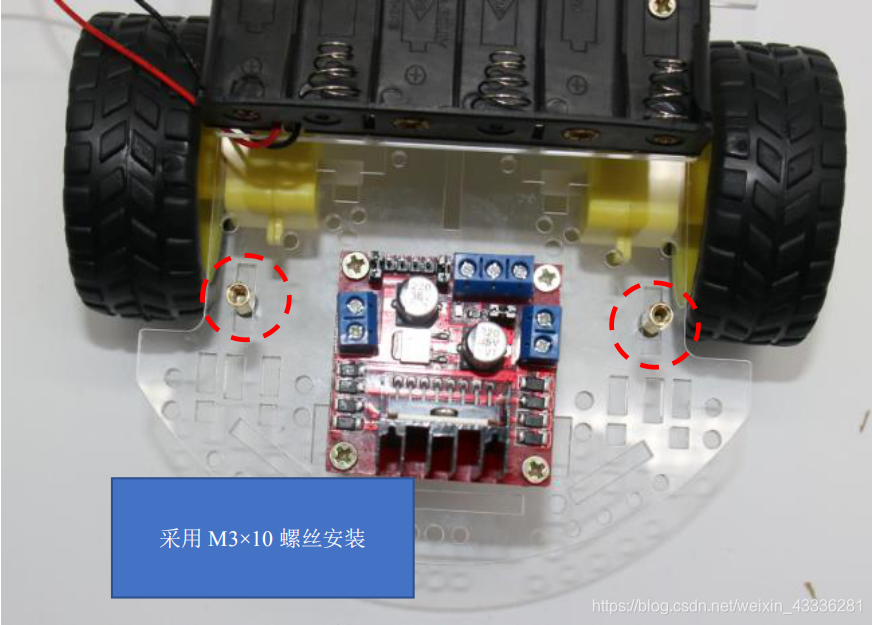
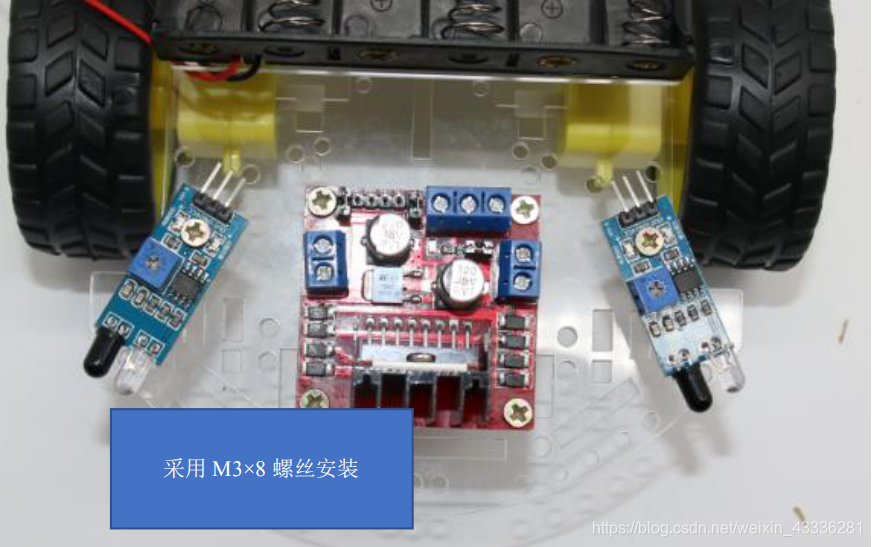
固定电机驱动模块
零件
(1)智能机器人 1 台
(2)电机驱动模块 1 个
(3)M3×10 通孔铜柱 4 个
(4)M3×10 螺丝 4 个
(5)M3×8 螺丝 4 个
(6)工具:螺丝刀 1
安装避障模块
零件
(1)智能机器人 1 台
(2)避障模块 2 个
(3)M3×10 通孔铜柱 2 个
(4)M3×10 螺丝 2 个
(5)M3×8 螺丝 2 个
(6)工具:螺丝刀 1
安装循迹模块
零件
(1)智能机器人 1 台
(2)循迹模块 1 个
(3)M3×25 通孔铜柱 1 个
(4)M3×10 螺丝 2 个
(5)工具:螺丝刀 1