作业描述
我为你准备了一个轨迹文件(code/trajectory.txt)。该文件的每一行由若干个数据组成,格式为
[t, t x , t y , t z , q x , q y , q z , q w ],
其中 t 为时间,t x , t y , t z 为 T W C 的平移部分,q x , q y , q z , q w 是四元数表示的 T W C 的旋转部分,q w
为四元数实部。同时,我为你提供了画图程序 draw_trajectory.cpp 文件。该文件提供了画图部分
的代码,请你完成数据读取部分的代码,然后书写 CMakeLists.txt 以让此程序运行起来。注意我
们需要用到 Pangolin 库来画图,所以你需要事先安装 Pangolin(如果你做了第一次作业,那么现
在已经安装了)。CMakeLists.txt 可以参照 ORB-SLAM2 部分。
遇到的坑:
代码文件放进clion编译不出来,include后也发现各种未定义引用,后来发现要改Cmakelist.txt才行
照着ORB-SLAM2的Cmake写法,把eigen3和Pangolin库都target_link进来,报的未定义引用只剩了Sophus库,再用find_package时候发现不行,网上查到是因为Sophus的lib文件在find_package时候不能引入路径。于是手动
set(Sophus_LIBRARIES "/usr/local/lib/libSophus.so")即可
在绘图时候发现轨迹的一端经常拉出一条长直线,推测是vector最后一项的值有问题,把绘图循环里的末尾值减少一个,轨迹正常。
Cmakelist.txt如下:
1 cmake_minimum_required(VERSION 2.8) 2 project(useEigen) 3 find_package(Pangolin REQUIRED) 4 find_package(Eigen3 3.1.0 REQUIRED) 5 6 set(Sophus_LIBRARIES "/usr/local/lib/libSophus.so") 7 set(CMAKE_BUILD_TYPE "Release") 8 SET( CMAKE_CXX_FLAGS "-std=c++11 -O3") 9 10 include_directories( 11 ${Pangolin_INCLUDE_DIRS} 12 ${EIGEN3_INCLUDE_DIR} 13 ) 14 15 add_executable(eigenMatrix eigenMatrix.cpp) 16 17 add_executable(tra trajectory.cpp) 18 19 target_link_libraries(tra 20 ${EIGEN3_LIBS} 21 ${Pangolin_LIBRARIES} 22 ${Sophus_LIBRARIES} 23 )
源码如下:
#include <sophus/se3.h> #include <string> #include <iostream> #include <fstream> #include <unistd.h> // need pangolin for plotting trajectory #include <pangolin/pangolin.h> #include <Eigen/Core> // 稠密矩阵的代数运算(逆,特征值等) #include <Eigen/Dense> using namespace std; using namespace Eigen; // path to trajectory file string trajectory_file = "/home/steve/L3/code/groundtruth.txt"; string estimated_file = "/home/steve/L3/code/estimated.txt"; // function for plotting trajectory, don't edit this code // start point is red and end point is blue void DrawTrajectory(vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3> > ,vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3> > ); int main(int argc, char **argv) { vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3> > poses1; vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3> > poses2; /// implement pose reading code // start your code here (5~10 lines) ifstream f(trajectory_file); string s0; while(!f.eof()) { Vector3d t_tmp; double db1, db2, db3,db4; f>> db1 >> db1 >> db2 >> db3; t_tmp << db1, db2, db3; f >> db1 >> db2 >> db3>>db4; Quaterniond q(db4,db1,db2,db3); //cout<<q<<endl; poses1.emplace_back(Sophus::SE3(q,t_tmp)); } ifstream g(estimated_file); while(!g.eof()) { Vector3d t_tmp; double db1, db2, db3,db4; g>> db1 >> db1 >> db2 >> db3; t_tmp << db1, db2, db3; g >> db1 >> db2 >> db3>>db4; Quaterniond q(db4,db1,db2,db3); //cout<<q<<endl; poses2.emplace_back(Sophus::SE3(q,t_tmp)); } // end your code here // draw trajectory in pangolin DrawTrajectory(poses1,poses2); return 0; } /*******************************************************************************************/ void DrawTrajectory(vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3> > poses1,vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3> > poses2){ if (poses1.empty()&&poses1.empty() ){ cerr << "Trajectory is empty!" << endl; return; } // create pangolin window and plot the trajectory pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768); glEnable(GL_DEPTH_TEST); glEnable(GL_BLEND); glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA); pangolin::OpenGlRenderState s_cam( pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000), pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0) ); pangolin::View &d_cam = pangolin::CreateDisplay() .SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f) .SetHandler(new pangolin::Handler3D(s_cam)); while (pangolin::ShouldQuit() == false) { glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); d_cam.Activate(s_cam); glClearColor(1.0f, 1.0f, 1.0f, 1.0f); glLineWidth(2); for (size_t i = 0; i < poses1.size() - 2; i++) { glColor3f(1 - (float) i / poses1.size(), 0.0f, (float) i / poses1.size()); glBegin(GL_LINES); auto p1 = poses1[i], p2 = poses1[i + 1]; glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]); glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]); glEnd(); } for (size_t i = 0; i < poses2.size() - 2; i++) { glColor3f(1 - (float) i / poses2.size(), 0.0f, (float) i / poses2.size()); glBegin(GL_LINES); auto p3 = poses2[i], p4 = poses2[i + 1]; glVertex3d(p3.translation()[0], p3.translation()[1], p3.translation()[2]); glVertex3d(p4.translation()[0], p4.translation()[1], p4.translation()[2]); glEnd(); } pangolin::FinishFrame(); usleep(5000); // sleep 5 ms } }
学习另一博客把绘图部分输入改为两个使得可以绘出两条轨迹比较。对estimated和groundtruth做了对比,绘图如下:
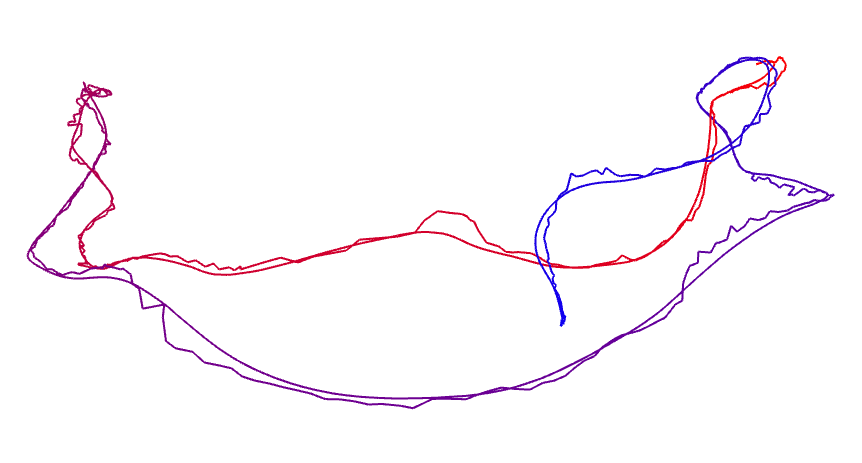
一开始以为是3条线后来发现是根据长度变颜色。。。
光滑的是基准,粗糙的是估计值(应该还没有做后端优化)
下一题:计算误差值
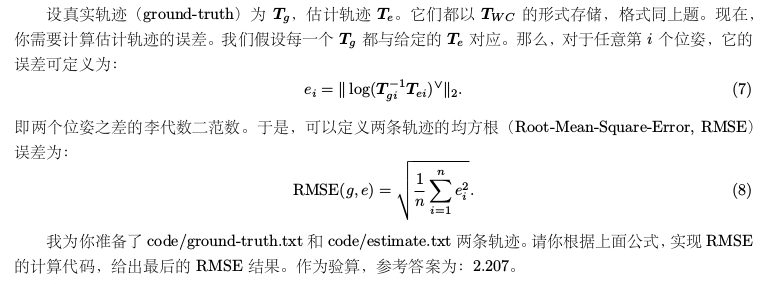
阅读se3各接口后调用代码如下
double error_s=0; for(int i=0;i<poses1.size()-1;i++){//也是要-1不然结果不对 error_s+= Sophus::SE3::log(poses1[i].inverse()*poses2[i]).squaredNorm(); } error_s=sqrt(error_s/(poses1.size()-1)); cout<<error_s<<endl;
hat是把6维李代数变成4×4李群矩阵,vee是相反,这里log是对数映射,自动就变成了6维李代数,不需要调用vee或者hat
调用结果:
PS:
Eigen::Isometry3d T; 是SE(3)的eigen写法
初始化为调用T.pretranslate(t)可以输入t
T.prerotate(R)输入R
或者用Isometry3d T(q)用四元数初始化R
使用时用T.matrix()