文档标识符:Bad_Dog_Go_A_Way_T-D-P2
作者:DLHC
最后修改日期:2020.6.30
本文链接:https://www.cnblogs.com/DLHC-TECH/p/Bad_Dog_Go_A_Way_T-D-P2.html
前言
有些时候,你会发现有的狗看见你就会不停的叫,这很烦。大多数时候,这不是狗的问题,而是狗主人的问题。如何让狗停止大叫,这是本文要讨论的问题。
超声波驱狗器是一种让狗停止大叫的装置,可以分为两类:
1.主动式。主动式需要使用者主动操作装置以发出超声波;
2.被动式。被动式是装置通过麦克风检测狗叫,当检测到了狗叫,装置发出超声波。本文讨论主动式驱狗器
。
你也可以在网上买到超声波驱狗器,价格在30--230元。
本文参考地址:
NE555和LM386数据手册、驱狗器原理图下载地址
链接 :https://pan.baidu.com/s/1-sBi6mq2uLmPSu1WLibqRQ
提取码:ufwu
你需要具备的技能
1.基本的焊接技巧和电路学知识
2.辨别二极管方向
3.辨别IC引脚
4.操作示波器,观察NE555和LM386输出的波形
5.一定的胆量,测试你的驱狗器
原理
人耳可以听见的声波频率范围为20--20,000Hz,狗可以听见的范围为15--50,000Hz。我们将以非常大的功率发出一个具有特定频率的声波,该声波应该满足以下条件:
1.处在狗可听见范围并且处在人耳可听范围外。
2.该声波具有特殊的频率,在这个频率下狗应该感到烦躁或恐惧。就好像你用粉笔刮黑板所产生的声音。
电路主要由NE555定时器、LM386音频放大器、超声波扬声器和电源组成。NE555输出20--27KHz的方波,方波被LM386放大,最后LM386推动扬声器产生超声波。我对原电路图做了以下改动:
1.在12V输入端串接一个拨动开关。
2.用1N4007替代1N4935。
3.将R1替换为3K9电阻串联2K双联可变电阻器的其中一联;将R2替换为3K9电阻串联2K双联可变电阻器的另外一联。用于改变信号频率。
D1(1N4935)是一个是整流二极管,使用1N4007替代。
C4是NE555输出信号的耦合电容。
电路图中X1-1和X1-2分别接+12V和地,是电源电压输入端;X2-1和X2-2是超声波扬声器1的信号输入端和地;X3-1和X3-2是超声波扬声器2的信号输入端和地。原作者设计了两个扬声器。扬声器的数量应该根据实际情况调整,笔者只使用了一个。
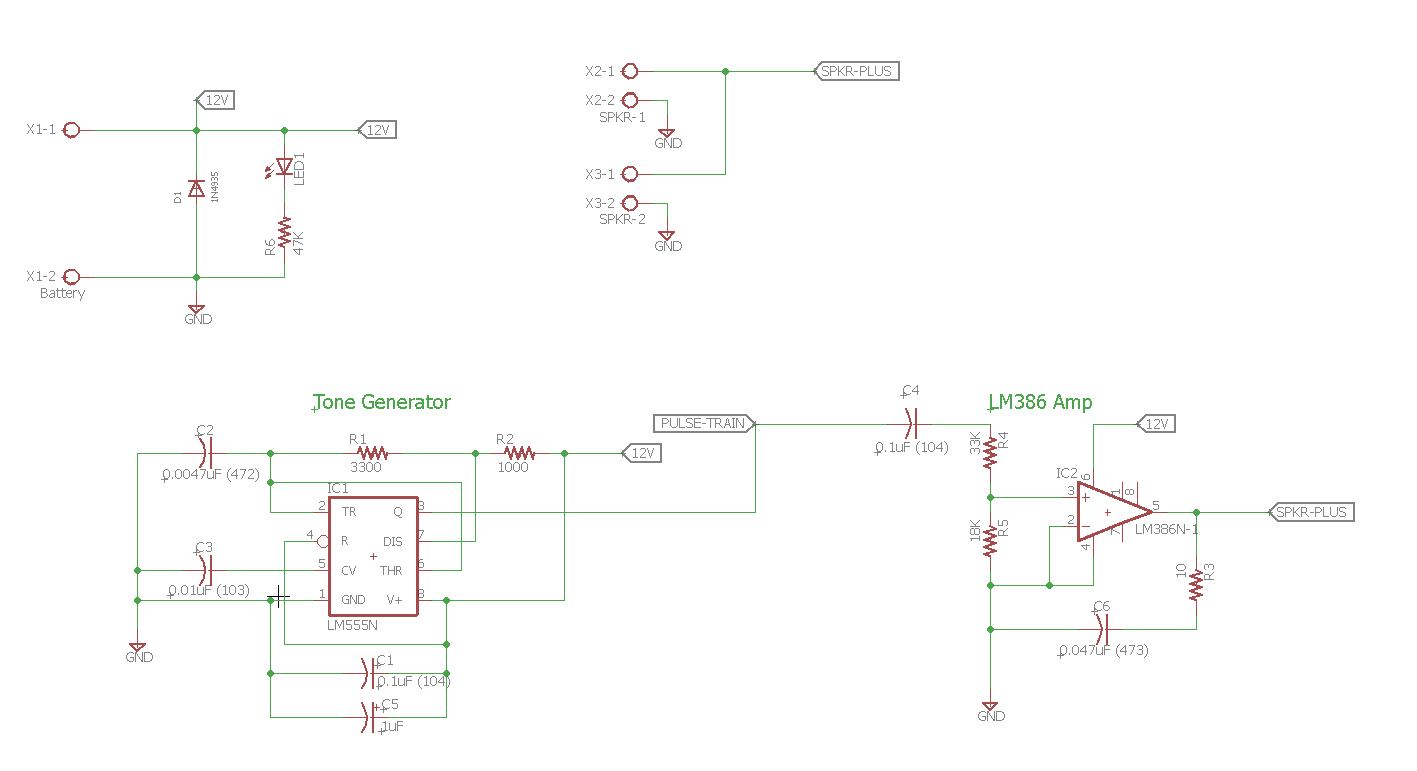
原理图(版权归原作者所有,改动未标识在原理图上)
元件清单
洞洞板 *1
NE555 *1
LM386 *1
DIP8芯片座 *2(可选)
323x7型超声波扬声器 *1(最好两个)
1N4007整流二极管 *1
LED红 *1
常开按键开关 *1(可选)
拨动开关 *1
2K双联可变电阻器 *1
3K9电阻 *2(对功率没有特殊要求,下同)
47K电阻 *1
33K电阻 *1
18K电阻 *1
10R电阻 *1
4.7nF(472)瓷片电容 *1
10nF(103)瓷片电容 *1
0.1uF(104)瓷片电容 *1
47nF(473)瓷片电容 *1
0.1uF铝电解电容 *1
1uF铝电解电容 *1
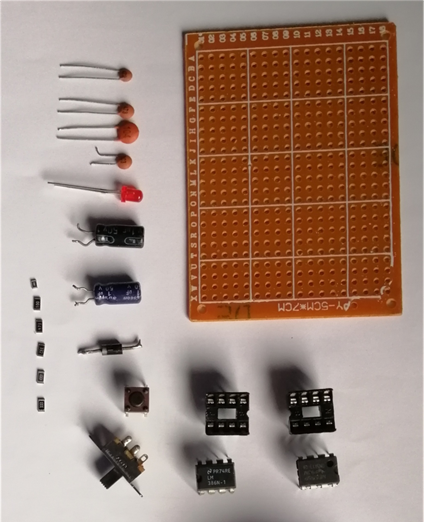
所有元件合照(图中不包含扬声器和双联可变电阻器)
部分元件介绍
NE555:NE555是一种常见的定时器,最大供电电压为18V,笔者使用9V。其工作在多谐振荡器模式,3号引脚输出20--27KHz的方波(方波的参数计算公式见下面,输出信号频率可通过双联电阻器调节)。

NE555P-DIP8
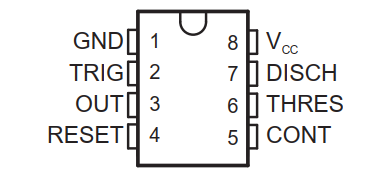
NE555引脚定义
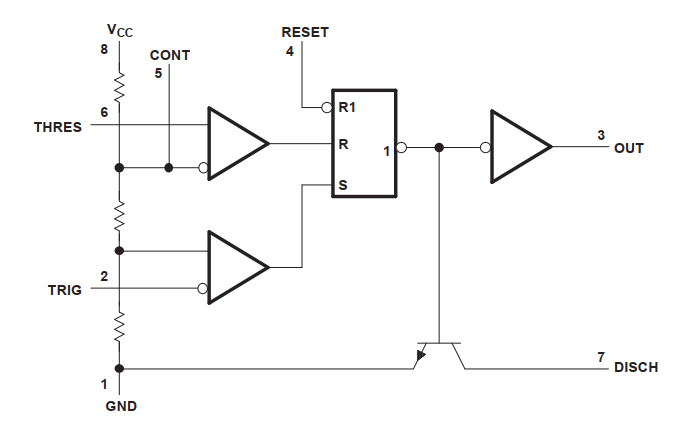
NE555内部框图
Tw1=0.7(R2+R1)C2------输出高电平宽度
Tw2=0.7R1C2--------------输出低电平宽度
f=1.44/[(R2+2R1)C]----------输出方波频率
q=(R1+R2)/(2R1+R2)----输出信号占空比
(所有参数的单位应该按照国际标准单位配置)

NE555输出方波示例(f=19.7KHz,Vpp=6V)
LM386:一款常见的低电压音频放大器。LM386 N-1供电电压最大为12V,笔者使用9V。本原理图中的LM386增益为20dB(100倍),如果需要改变增益,参考数据手册。

LM386实物

LM386引脚定义

LM386等效电路图
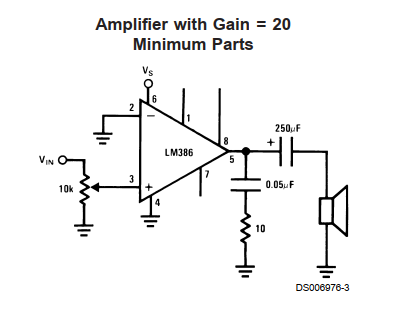
典型应用
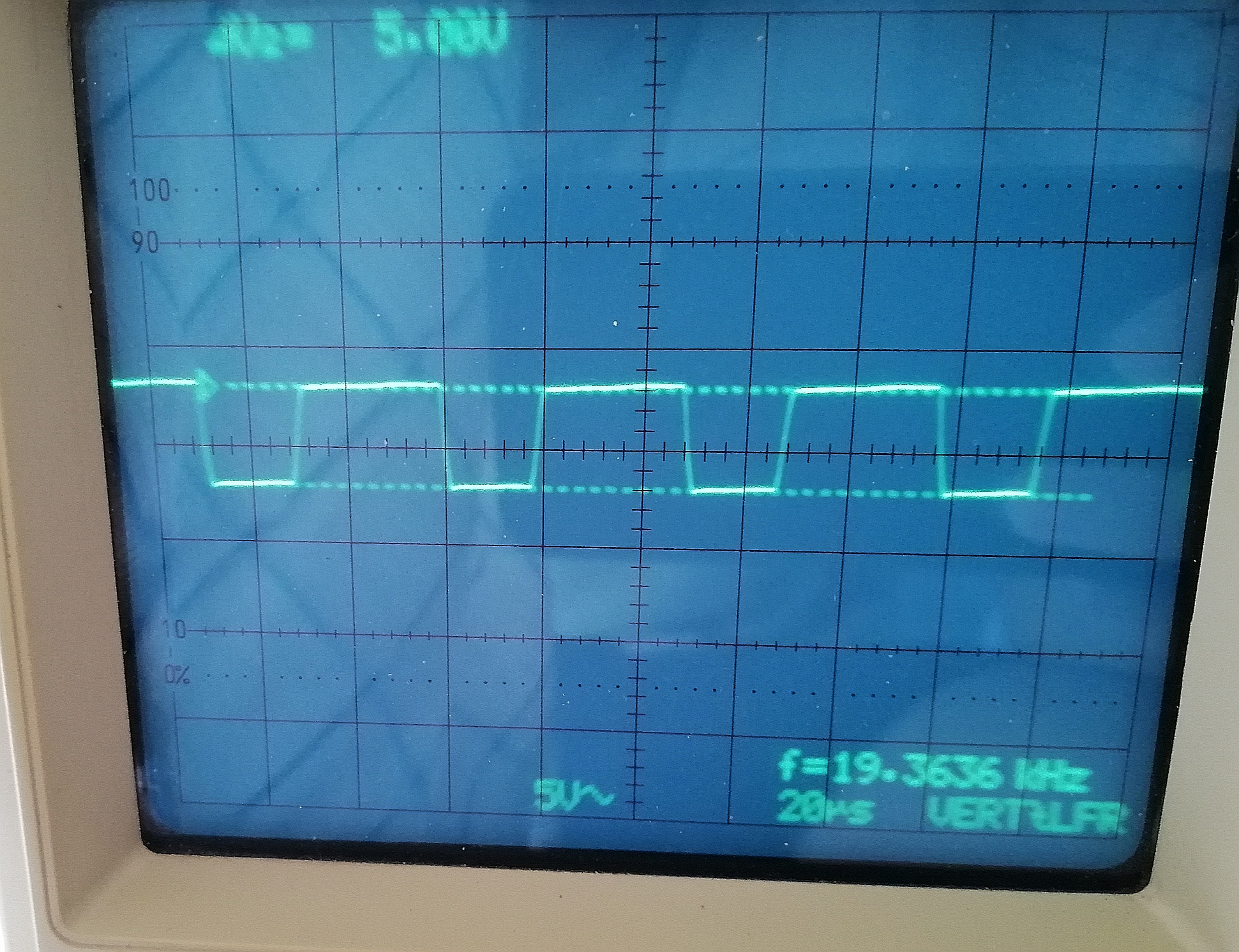
LM386放大NE555方波后的波形(f=19.3KHz,Vpp=5V)
超声波扬声器(高音喇叭):一种输出声波频率比一般的扬声器更宽的扬声器,型号为323x7的压电喇叭,频响范围2--27KHz,阻抗4--8欧,使用万用表测量两端电阻均为无穷大。可以用它发出人类无法听到的声波。
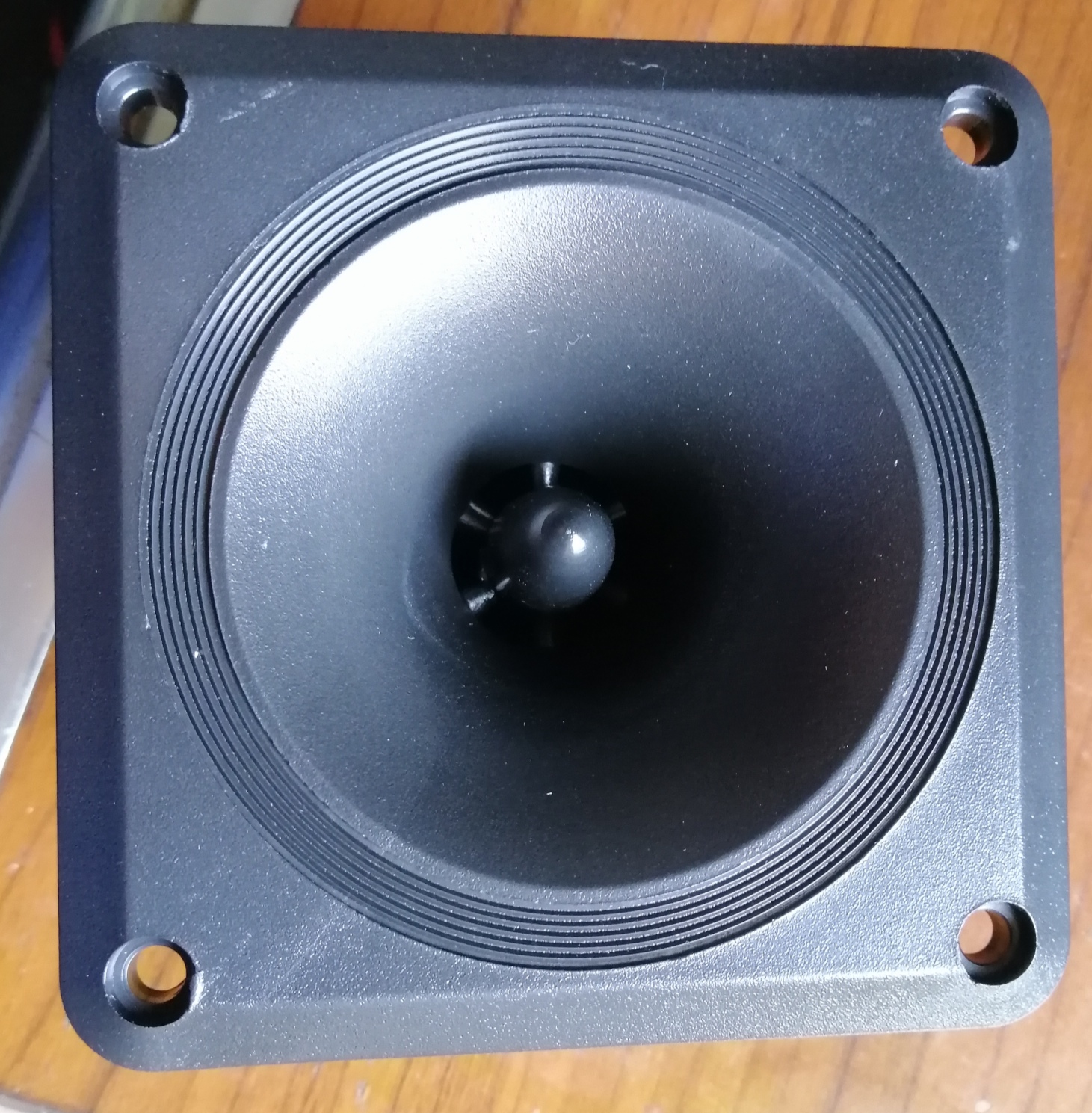
实物(正)

实物(反)
可变电阻器:用于改变输出信号的频率,其中R1和R2大小相等且同时变化。输出信号为20KHz时R1=R2且对应于5K1,为27KHz时R1=R2且对应于3K8。信号输出的占空比恒为66%。注意,双联电阻器的两联不同步将导致信号频率偏移。
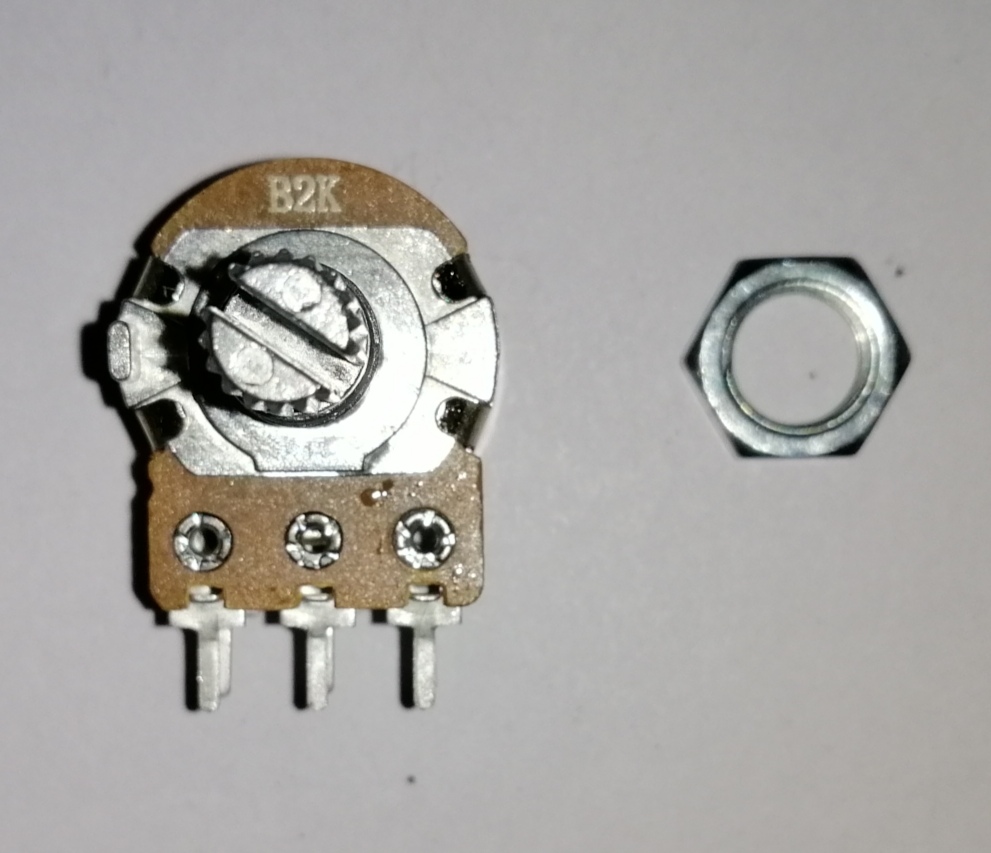
实物
1N4007整流二极管:一种常见的整流二极管,在此电路中用于防止电源接反。
1N400X二极管参数
完成后
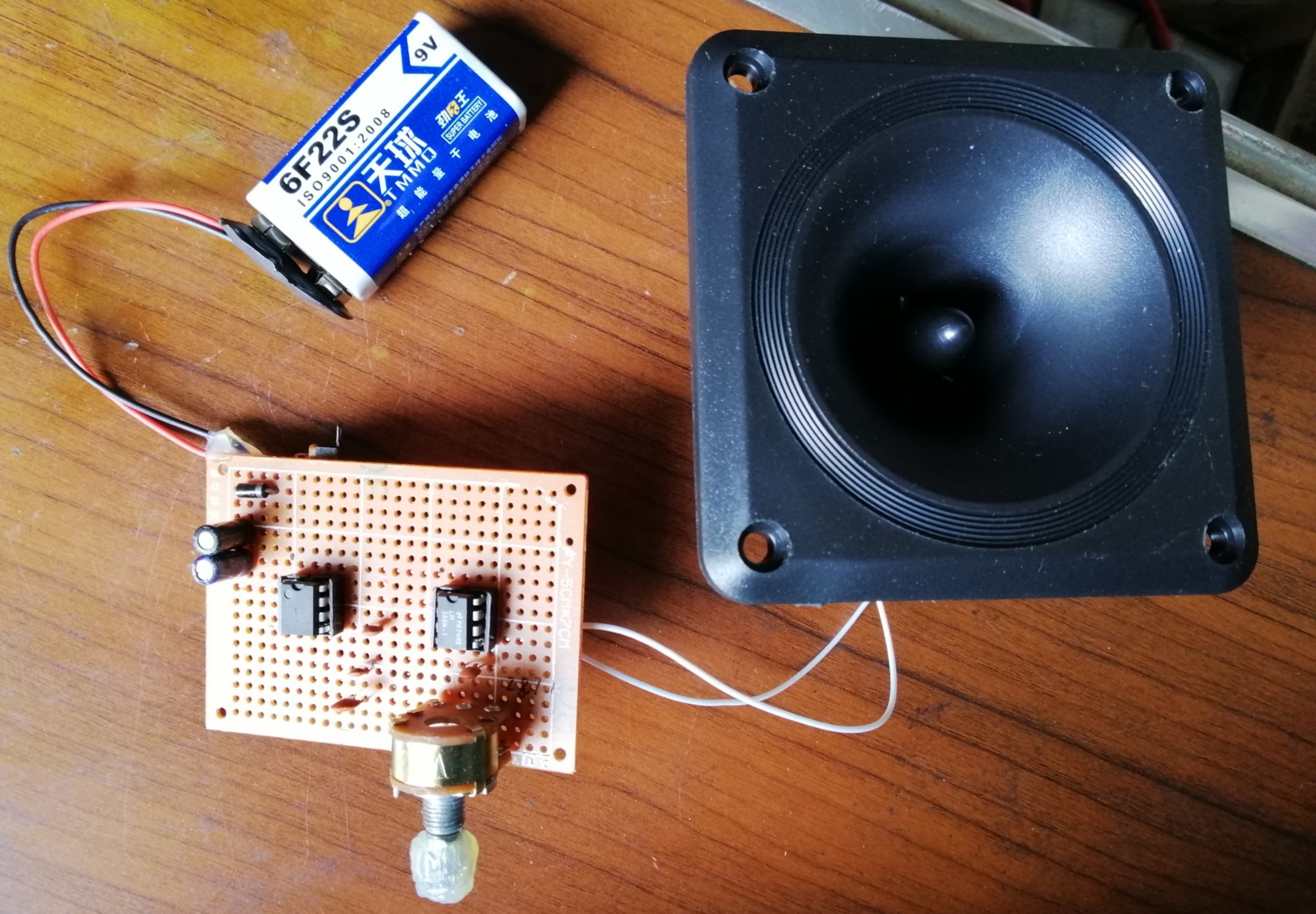
正面(图中未添加LED和按键开关,下同)
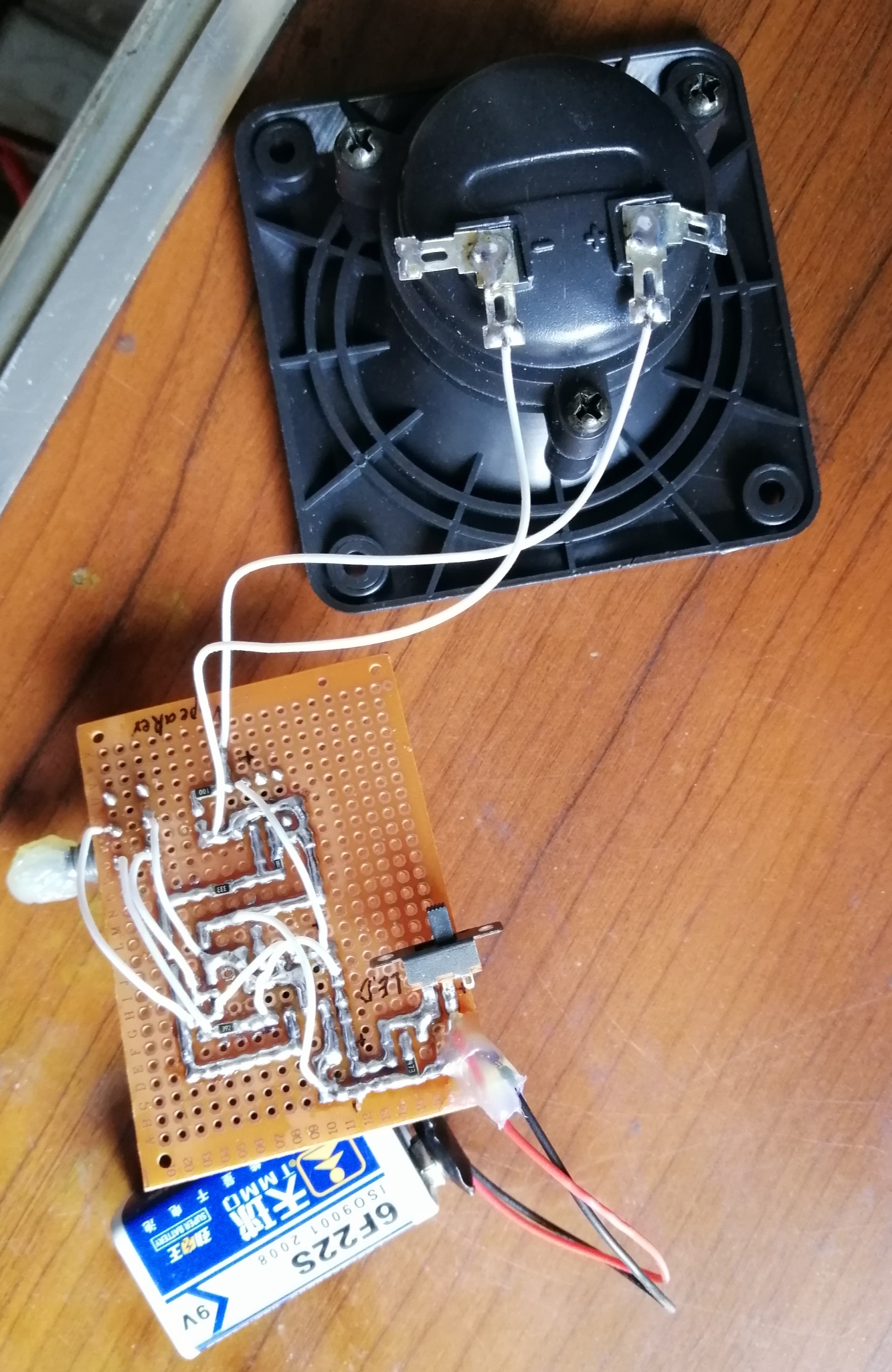
反面
测试结果
1.使用可变电阻器进行频率调节时,频率不是按预期的单调变化,频率变化有如下规律:7KHz-->28.7KHz-->19.8KHz。原因是双联可变电阻器的两联不是严格的同步变化,两联之间存在一些误差。
2.尝试用耳朵听时,发现声音十分刺耳,刺耳不是指声音大,而是令人感到恶心。应该避免长时间听此声音,其对听觉系统有影响。
3.找了一条狗进行测试,当我走进它时,它开始狂叫。这时我打开驱狗器,它好像听到了什么,就不叫了,很神奇,但是狗没有逃跑。
4.功耗如下: 45--88mA @12V
38--68mA @9V
改进措施
1.可以尝试使用精度更高的双联可变电阻器,用以消除频率误差。
2.在上述拨动开关处再并联一个按键开关(可以更方便地控制驱狗器)。
3.如果你要训练你的狗,那么你需要为这个电路添上一个麦克风和其他一些电路,也就是被动式驱狗器。可以参考此书:《玩转电子制作DIY:33例》科学出版社。
4.当使用此装置时,人耳可听见喇叭发出刺耳的声音,可以想办法滤除该声音。
后续
1.如果想要增大输出功率,可以尝试并联多个超声波扬声器或使用其他的运算放大器。
2.有条件的话,我会再找一些狗,测试我的驱狗器。感谢反馈。目前,测试了一只狗(就是那只烦人的狗)。
3.后面我可能会开发一个开源、便携的真正意义上的驱狗器,本次仅仅验证了原理。
声明
原理图版权归原作者所有。此教程未经DLHC允许,禁止转载。DLHC保留所有权利。