实现思路步骤:
1.对原图像gamma校正,img=sqrt(img);
2.求图像竖直边缘,水平边缘,边缘强度,边缘斜率。
3.将图像每16*16(取其他也可以)个像素分到一个cell中。对于256*256的lena来说,就分成了16*16个cell了。
4.对于每个cell求其梯度方向直方图。通常取9(取其他也可以)个方向(特征),也就是每360/9=40度分到一个方向,方向大小按像素边缘强度加权。
5.每2*2(取其他也可以)个cell合成一个block,所以这里就有(16-1)*(16-1)=225个block。最后归一化直方图。
6.所以每个block中都有2*2*9个特征,一共有225个block,所以总的特征有225*36个。
当然一般HOG特征都不是对整幅图像取的,而是对图像中的一个滑动窗口取的。
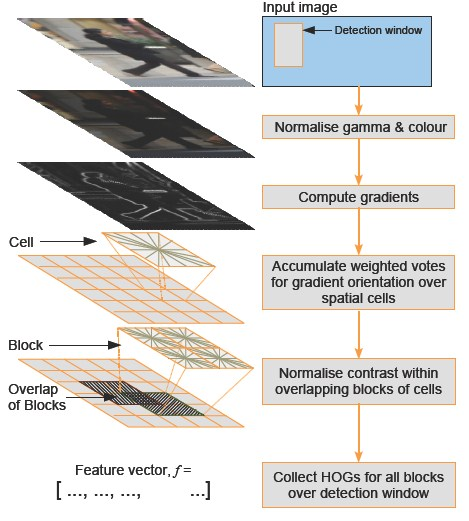
形象化的用一个流程图显示:

matlab实现代码:参考别人的修改的
clear;clc; img=imread('E:matlena.jpg');%图片位置 %获取图像,尺寸,并将图像resize成step的最近整数倍 img=double(img); figure;imshow(img,[]);%显示图像 step=8; %step*step个像素作为一个cell [m1 ,n1]=size(img);%获取图像尺寸 img=imresize(img,[floor(m1/step)*step,floor(n1/step)*step],'nearest'); [m,n]=size(img); %伽马校正 img=sqrt(img); figure; imshow(img,[]);%显示图像 %滤波,求梯度 fy=[-1 0 1]; %定义竖直模板 fx=fy'; %定义水平模板 Iy=imfilter(img,fy,'replicate'); %竖直边缘 Ix=imfilter(img,fx,'replicate'); %水平边缘 Ied=sqrt(Ix.^2+Iy.^2); %边缘强度 求梯度的长度 Iphase=Iy./Ix; %边缘斜率,有些为inf,-inf,nan,其中nan需要再处理一下 figure; imshow(Ied,[]); %显示梯度提取后的值 %求cell orient=9; %方向直方图的方向个数 angular=360/orient; %每个方向包含的角度数,划分角度区间,0到40度一个区间... Cell=cell(1,1); %所有的角度直方图,cell是可以动态增加的,先设了一个 %% 开始获取orient个方向的特征向量 ii=1; jj=1; for i=1:step:m-step %如果处理的m/step不是整数,最好是i=1:step:m-step ii=1; for j=1:step:n tmpx=Ix(i:i+step-1,j:j+step-1); %水平 tmped=Ied(i:i+step-1,j:j+step-1); %边缘强度 tmped=tmped/sum(sum(tmped)); %% 局部边缘强度归一化 tmpphase=Iphase(i:i+step-1,j:j+step-1);%% 边缘斜率局部提取 Hist=zeros(1,orient); %% 创建直方图 %当前step*step像素块统计角度直方图,就是cell %% 统计一个cell里面的梯度信息 for p=1:step for q=1:step %% 判断是不是一个数字True for Not-a-Number.如果不是一个数字,就归零 if isnan(tmpphase(p,q))==1 %因为会遇到0/0的情况 tmpphase(p,q)=0; end %% 进行区间的划分 ang=atan(tmpphase(p,q)); %atan求的是[-90 90]度之间 ang=mod(ang*180/pi,360); %全部变正,-90变270 if tmpx(p,q)<0 %根据x方向确定真正的角度 if ang<90 %如果是第一象限 ang=ang+180; %移到第三象限 end if ang>270 %如果是第四象限 ang=ang-180; %移到第二象限 end end ang=ang+0.0000001; %防止ang为0 Hist(ceil(ang/angular)) = Hist(ceil(ang/angular))+tmped(p,q); %ceil向上取整,使用边缘强度加权 end end %% 方向直方图归一化 Hist=Hist/sum(Hist); Cell{ii,jj}=Hist; %放入Cell中 ii=ii+1; %针对Cell的y坐标循环变量 end jj=jj+1; %针对Cell的x坐标循环变量 end %% 下面是求feature,2*2个cell合成一个block,没有显式的求block [m2, n2]=size(Cell); feature=cell(1,(m2-1)*(n2-1)); for i=1:m2-1 for j=1:n2-1 f=[]; f=[f Cell{i,j}(:)' Cell{i,j+1}(:)' Cell{i+1,j}(:)' Cell{i+1,j+1}(:)']; feature{(i-1)*(n2-1)+j}=f; end end %以上就可以得到我们需要的所有的HOG特征了,以下部分主要是为了显示 l=length(feature); f=[]; for i=1:l f=[f;feature{i}(:)']; end figure mesh(f)
当然看文献发现我们还可以对得到的HOG特征进行PCA降维处理来提高计算速率的同时,降低噪声的影响。----有点矛盾吧,HOG我感觉实际上是采用不断划分cell和block的过程增加描述图像的特征,而PCA则是降低图像特征描述的维数。
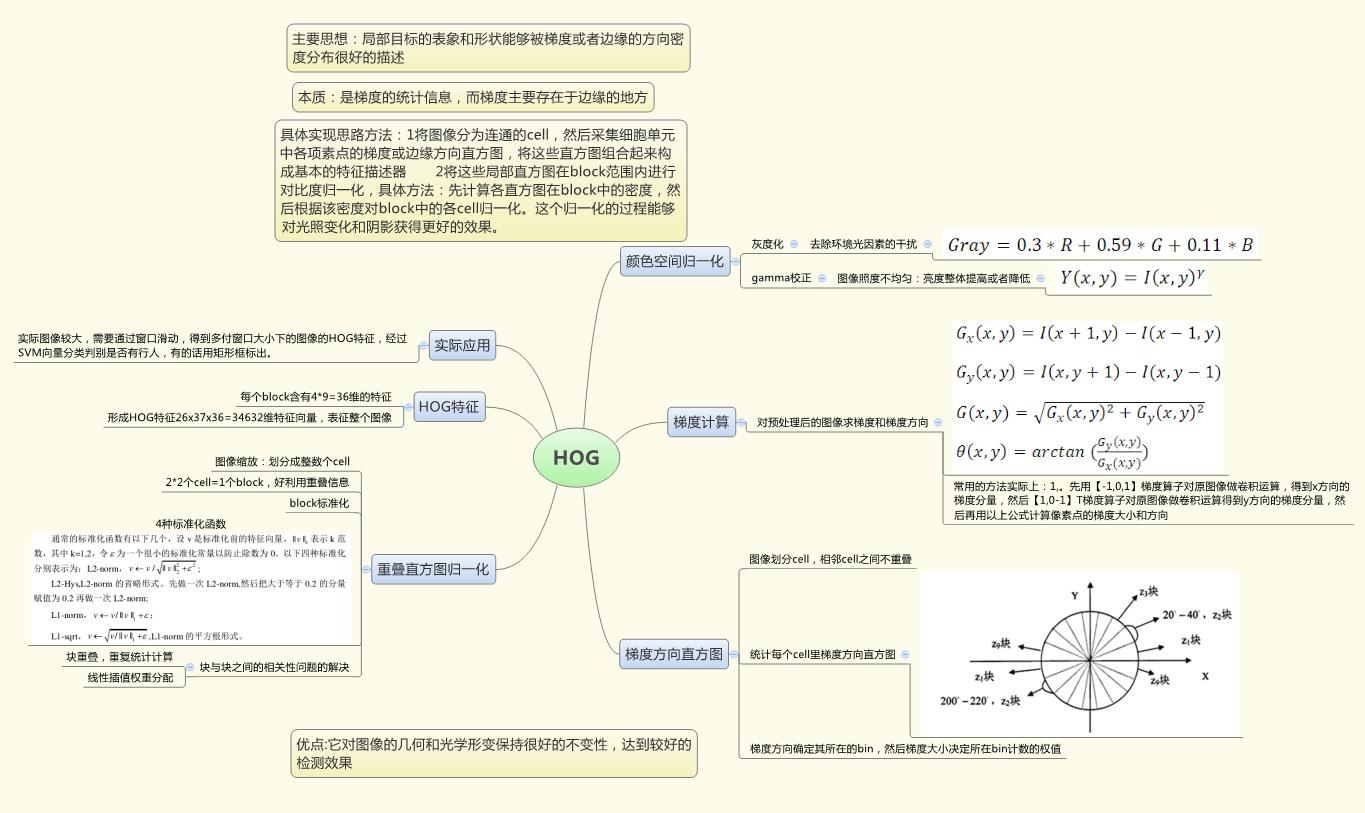
附一个基础整理的mind图:
亲测可用的程序
clear all; close all; clc; %img=double(imread('lena.jpg')); %img=imread('man.png'); img=imread('C:UsersdingDesktopTest.jpg'); img=rgb2gray(img); %简单起见,彩图转灰度图。后续可以改进。 img=imresize(img, [128 64]); img=double(img); [h, w, ~] = size(img); %下面是求cell cell_size=8; %step*step个像素作为一个cell. cell_size=pixels_per_cell orient=9; %方向直方图包含的方向数 angle_range=180/orient; %每个方向包含的角度数 h=round(h/cell_size)*cell_size; w=round(w/cell_size)*cell_size; img=img(1:h,1:w,:); img = sqrt(img); %伽马校正。J=AI^r 此处取A=1,r=0.5 % 下面是求边缘 fy=[-1 0 1]; %定义竖直模版 fx=fy'; %定义水平模版 Gy=imfilter(img, fy, 'replicate'); %竖直梯度 Gx=imfilter(img, fx, 'replicate'); %水平梯度 Gmag=sqrt(Gx.^2+Gy.^2); %梯度幅值 %为每个cell计算其decriptor(梯度方向直方图,即一个1*orient规格的向量) cell_descriptors=zeros(orient, h/cell_size, w/cell_size); idx_y=1; for y=1:cell_size:h idx_x=1; for x=1:cell_size:w tmpx=Gx(y:y+cell_size-1, x:x+cell_size-1); tmpy=Gy(y:y+cell_size-1, x:x+cell_size-1); tmped=Gmag(y:y+cell_size-1,x:x+cell_size-1); tmped=tmped/sum(sum(tmped)); %每个cell的局部边缘强度归一化 cell_hist=zeros(1, orient); %当前cell_size*cell_size像素统计角度直方图,就是cell for p=1:cell_size for q=1:cell_size ang=atan2(tmpy(p,q), tmpx(p,q)); %atan2返回的是[-pi,pi]之间的弧度值 ang=mod(ang*180/pi, 180); %先转角度,再划归到[0,180)之间。因为mod的参数现在不是整数,因此会大于179. ang=ang+0.0000001; %防止ang为0 bin_id = ceil(ang/angle_range);%得到的bin_id in [1,9] cell_hist(bin_id)=cell_hist(bin_id)+tmped(p,q); %ceil向上取整,使用边缘强度加权。此处根据梯度方向进行vote,权值为梯度幅值 end end cell_descriptors(:,idx_y,idx_x) = cell_hist; idx_x = idx_x + 1; end idx_y = idx_y + 1; end %下面是计算feature,block_size*block_size个cell合成一个block %比如block_size取2 [sw, h, w]=size(cell_descriptors); block_size=2; %cells_per_block=2,即每个block_size=2*8=16像素 %d得到横竖方向数分别有几个block,用于计算总的特征数量 stride=1; h_max=floor((h-block_size)/stride)+1; w_max=floor((w-block_size)/stride)+1; block_descriptors=zeros(block_size*block_size*orient, h_max, w_max); for i=1:h_max for j=1:w_max blk_mat=cell_descriptors(:,i:i+block_size-1, j:j+block_size-1);%得到每个block的特征值 %%L2范数归一化就是向量中每个元素除以向量的L2范数 for k=1:9 A=reshape(blk_mat(k,:,:),2,2); normed_blk_mat(k)=norm(A,2); % blk_mat1= end normed_blk_mat1=norm(normed_blk_mat,2); normed_blk_mat2=blk_mat/normed_blk_mat1; reshaped_blk_mat=reshape(normed_blk_mat2, [1 block_size*block_size*orient]); block_descriptors(:,i,j)=reshaped_blk_mat; end end %将block_descriptors进行拼接,得到final_descriptor [d1,d2,d3]=size(block_descriptors); dimensions=d1*d2*d3; final_descriptor=zeros(1, dimensions); k=1; for i=1:d2 for j=1:d3 final_descriptor(k:k+d1-1)=block_descriptors(:,i,j); k=k+d1; end end