
激光点云数据是通过一定的测量手段直接或间接采集符合测量规则,且能够刻画目标表现特性的密集点集合,是继矢量、影像后的第三类空间数据,为刻画三维现实世界提供了最直接和有效的表达方式。目前四维益友已使用激光点云技术在古建筑三维重建、街景建模等方面
一起进入平台看EasyEarth如何进行点云处理
目前仅支持投影坐标的*las.数据的点云数据处理
【点云处理】
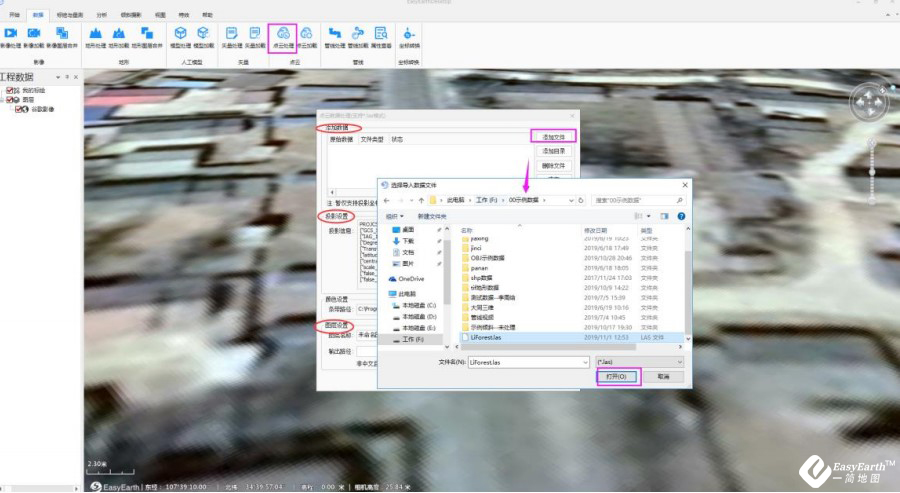
1、添加数据
点击 “添加文件”,选择需处理的* .las点云数据文件(试用版数据量最大为100M)
添加完成数据后,可选中文件删除,或清空已添加的文件。
 添加数据
添加数据
2、投影设置
默认获取影像数据自带投影,若影像不带投影信息,可直接用系统自带默认投影,也可自己设置投影信息,步骤如下:(若不自己设置,可直接进行图层设置) 点击“新建”,设置坐标系,如图,分别设置参考坐标系,及X,Y偏移值,设置完成后,点击“保存”,保存*.config 格式的坐标文件。
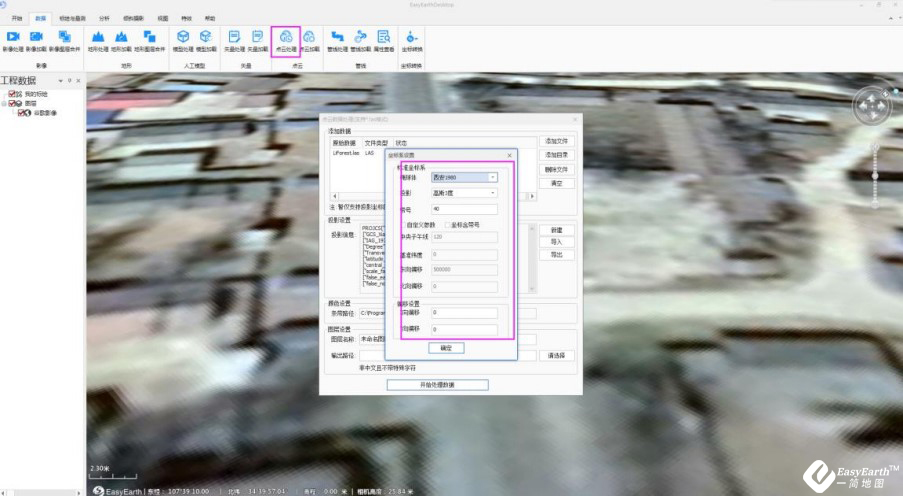
新建投影
若已设置好投影坐标,可直接点击“导入”,快速引用坐标文件
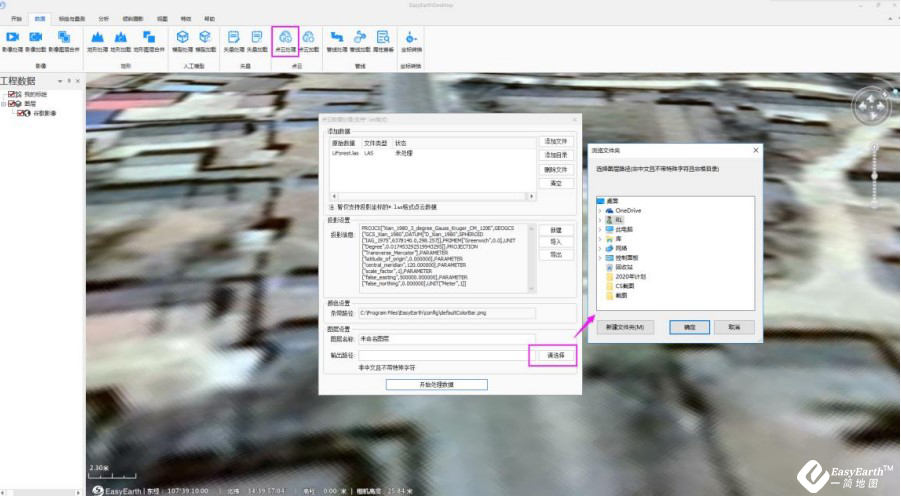
3、图层设置
输入图层名称,选择处理数据的输出路径(仅支持非中文且不带特殊字符的目录,请严、
格按照格式输出,否则可能会导致数据处理失败) 。
图层设置
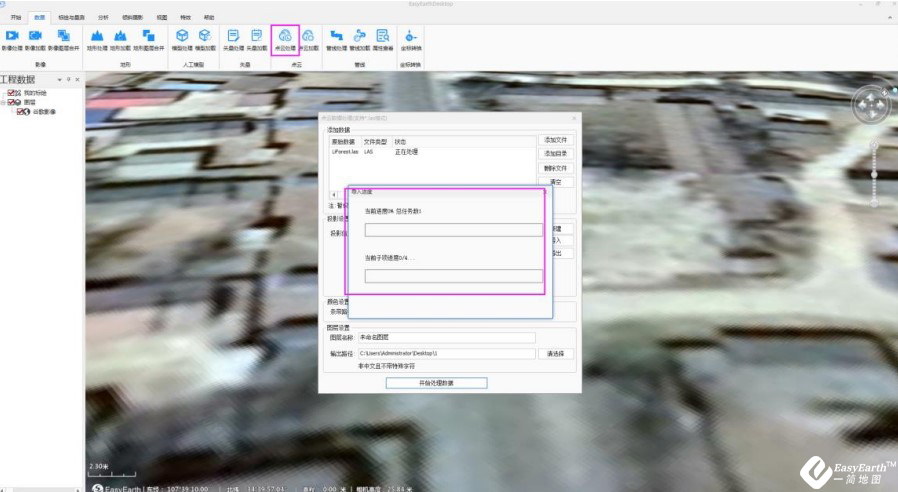
处理数据
浏览数据
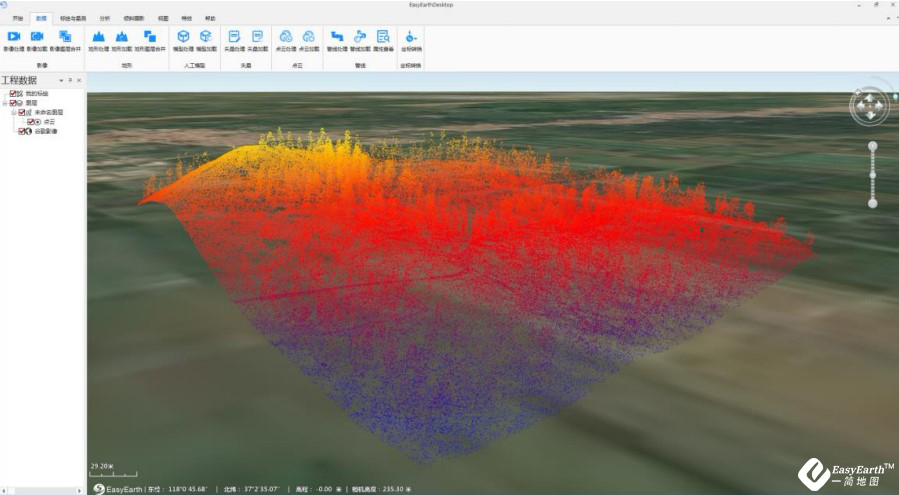
【点云加载】
点击“点云加载”,选择已处理完成的*.config 文件,加载查看。