一.前提
Games101 lecture4-lecture5
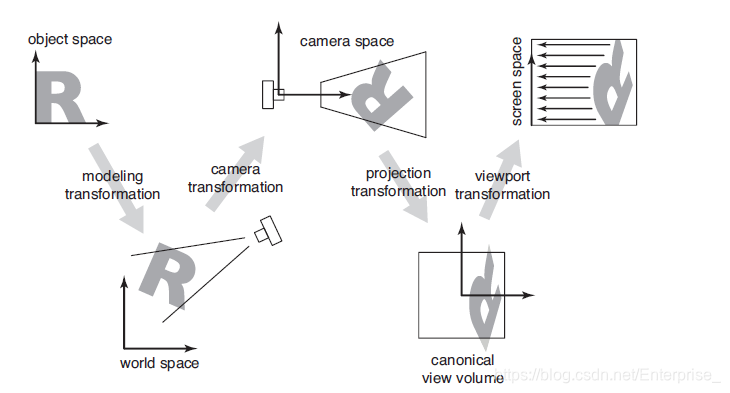
考虑将三位物体转换二维图像需要的步骤,我们需要以下变换来达成目的,
model transformation(模型(基础)变换--Object就位)
view/camera transformation(视图变换--调整相机)
projection transformation(投影变换--变换到([-1,1]^3),忽略深度信息(z),变成([-1,1]^2))
viewport transformation(视口变换--投影到屏幕空间)
如下图所示(Fundamentals of Computer Graphics (3rd Edition) 7.1 Viewing Transformations Figure 7.2):
二.视图变换
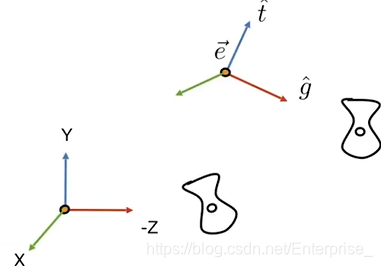
首先需要定义一个相机,一个相机有三个属性,位置(Positon)(pmb{e}),观测方向(Look-at/ gaze direction)(pmb{g})和向上方向(Up direction)(pmb{t})。
同时只要相机和物体之间没有相对运动,观测结果就不会改变,则可以让相机固定在原点,向上方向为(Y)方向,看向(-Z)方向,而这就需要通过变换矩阵(M_{view})来自达成(需要注意的是物体也会随着相机移动而移动,因为要保证两者之间没有相对运动),该矩阵需要完成如下操作:
- 将原来在任意点(pmb{e})的相机平移到原点
- 将观测方向(pmb{g})旋转到(-Z)方向
- 将向上方向(pmb{t})旋转到(Y)方向
- 将{(pmb{g})X(pmb{t})}方向旋转到(X)方向(当前两个方向旋转完成之后,(X)方向自然对齐)
如下图所示:
(M_{view})先平移在旋转(和仿射变换不同),即(M_{view}=R_{view}T_{view})。
最后结果如下:
1.推导过程
首先是平移到原点,可以很自然的写出其平移矩阵(T_{view})如下:
接着考虑旋转,将任意方向旋转到(X,Y,-Z)方向上不容易写出,但是可以考虑其逆变换,写出将(X(1,0,0),Y(0,1,0),Z(0,0,1))旋转到{(pmb{g})X(pmb{t})},(pmb{t}),(pmb{-g})的旋转矩阵(R_{view}^{-1}),并且由于旋转矩阵是正交矩阵,所以只要写出(R_{view}^{-1}),其转置矩阵即为所求,如下所示:
可以通过将上述矩阵应用与三轴来检验其正确性。(R_{view})如下所示:
所以最终的(M_{view})如开头所示。
三.投影变换
投影变换目的就是将物体变换到([-1,1]^3)。想要得到二维图像,可以去掉(z),变成([-1,1]^2)。变换分为两种,正交(orthographic)投影和透视(prespective)投影。透视投影存在近大远小的现象,而正交投影则不会,这是两者的本质区别,两者分别如下图所示:
图片来源:https://stackoverflow.com/questions/36573283/from-perspective-picture-to-orthographic-picture
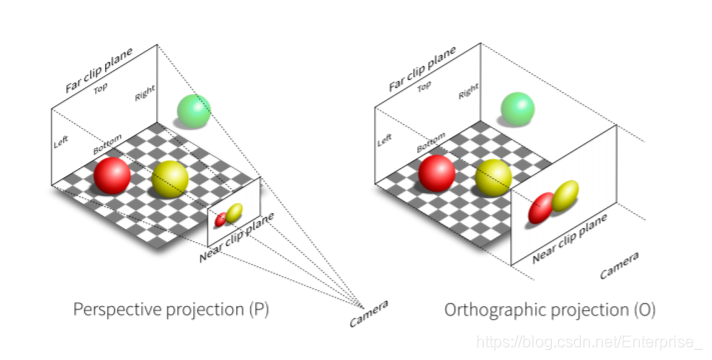
上图中透视投影围成一个视锥(四棱锥),而视锥中从某一个深度到另一个深度之间的区域叫做(frustum),而透视投影就是将(frustum)中的东西显示到近平面((Near) (clip) (plane))上。
1.正交投影(右手系)
首先定义一个空间中的立方体(只需定义6个面,左右上下前后),([l,r])x([b,t])x([f,n]),需要注意的是远平面((f))和近平面((n)),有(pmb{n}>pmb{f})因为看向(-Z)(右手系),所以物体越远则其对应的(Z)的值越小,反之越大。如果是左手系则越远(Z)越大,因为看向的(+Z)方向。然后将立方体中心平移到原点,并将其缩放成(canonical)(正则规范标准立方体) (cube [-1,1]^3),忽略(z),则变为([-1,1]^2)。
如下图所示:
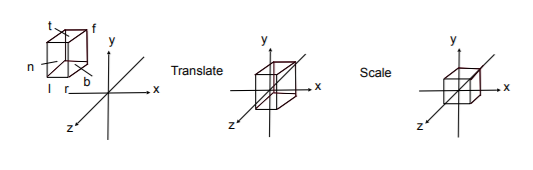
先将立方体中心((frac{r+l}{2},frac{t+b}{2},frac{n+f}{2}))平移到原点,然后缩放到([-1,1]^3)(长宽高为(2)),这里的缩放其实就是将立方体的长宽高缩放为(2),其变换矩阵(M_{ortho})如下:
2.透视投影
(1)视锥定义
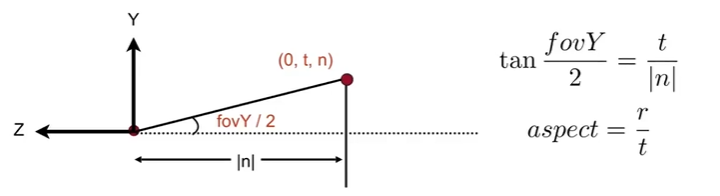
透视投影的视锥定义只要定义两个东西1.垂直可视角度(Y) 2.宽高比(aspect),如下图所示:

从侧面观察,则近平面距离相机距离为(|n|),如下图所示:
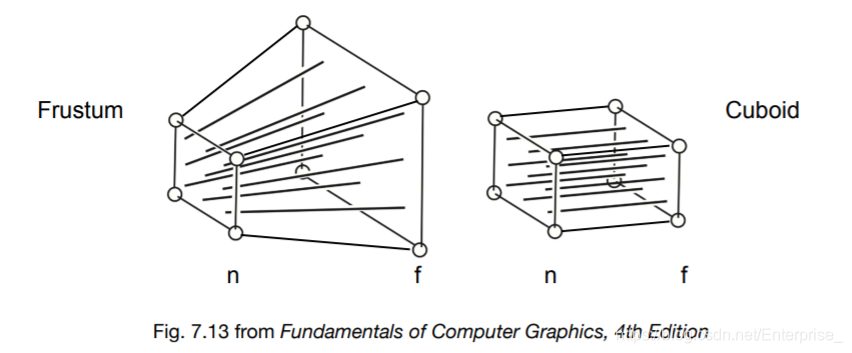
(2)怎么做透视投影(M_{persp}=M_{ortho}M_{persp->ortho})
- 首先将(frustum)挤压成一个长方体((M_{persp->ortho}))(([l,r])x([b,t])x([f,n]),);
- 然后再做一次正交投影((M_{ortho}),已知)。即可完成投影到近平面的任务。
如下图所示:
(3)前提规定
-
在挤压过程(第一步)中(frustum)的近平面(n)上点不变;
-
(f)平面的(Z)值不变,因为只是在收缩;
-
(f)平面的中心点是不会改变的(挤压完还是中心点)。
(4)推导过程
先单独考虑挤压过程,我们需要找到一个矩阵来完成变换。
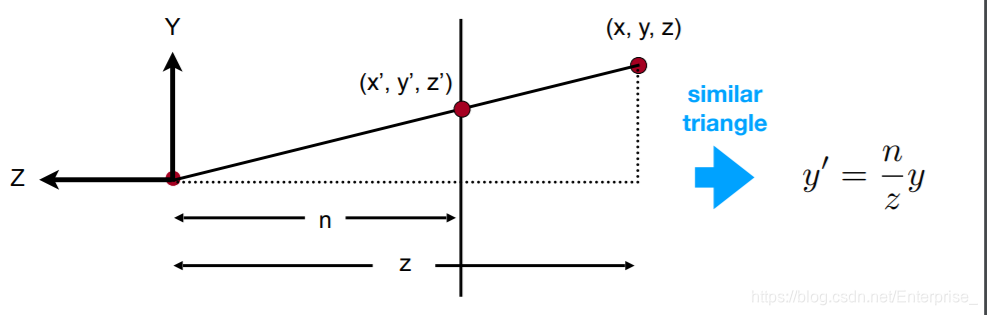
考虑下图,从视锥的侧面看,我们需要将((x,y,z))挤压到和近平面上点((x',y',z'))一样的高度,考虑相似三角形,则有(y'=frac{n}{z}y);同理(从上面看),对于(x)而言有(x'=frac{n}{z}x)。
需要注意的是,这里(pmb{n},pmb{z})在图上表示的是距离原点的距离(负(Z)方向),所以是个负数。
至此,已知挤压过程(x,y)的变换,(z)未知,将上述变换用齐次坐标,同时在基础变换中我们提到过对于齐次坐标而言,((x,y,z,w)^T(w!=0))表示的点即为((frac{x}{w},frac{y}{w},frac{z}{w},1)^T)。 所以有如下关系:
从中可以反推出(M_{persp->ortho})如下:
同时因为挤压过程中近平面点不变,远平面点(Z)值不变。则对于一个近平面上点((x,y,n,1)^T)(假设近平面上的(z)的值为(n))。考虑齐次坐标中一个点可以有很多不同的表示,同理则有((x,y,n,1)^Tstackrel{同乘n}{=}(nx,ny,n^2,n)^T)变换后是不变的。所以有如下关系:
则可以推出变换矩阵的第三行为((0,0,A,B)),即有式子((1))如下:
再考虑(f)平面中(z)不变,且中心点不变,则对于其中心点((0,0,f,1))(假设远平面上(z)值为(f))。则有如下关系式子((2)):
由((1)(2))可得,如下结果
则有
所以透视投影变换矩阵计算如下:
(5)Question:frustum中间的点的变化
在(frustum)中间任何一个位置,比如点((x,y,frac{n+f}{2},1)^T),经过挤压之后(不做第二步正交)更加靠近远平面还是近平面?(远平面)
推导过程
先将(M_{persp->ortho})应用到该点上,如下:
比较变换前后两点的(Z)值大小,如下:
前面提到此时的(n,f)是个负数,所以有((n-f)^2>0),((n+f)<0),即更加靠近远平面。