基本思想:
弗洛伊德算法定义了两个二维矩阵:
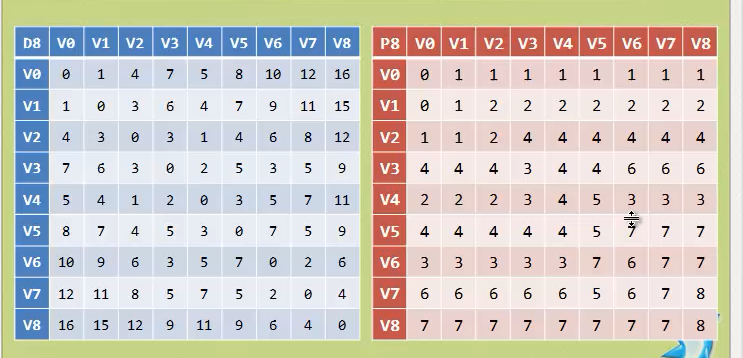
- 矩阵D记录顶点间的最小路径
例如D[0][3]= 10,说明顶点0 到 3 的最短路径为10; - 矩阵P记录顶点间最小路径中的中转点
例如P[0][3]= 1 说明,0 到 3的最短路径轨迹为:0 -> 1 -> 3。
它通过3重循环,k为中转点,v为起点,w为终点,循环比较D[v][w] 和 D[v][k] + D[k][w] 最小值,如果D[v][k] + D[k][w] 为更小值,则把D[v][k] + D[k][w] 覆盖保存在D[v][w]中。
如下图:

对应的邻接矩阵

最终结果
代码:
#include <iostream> #include <cstring> #define MAX 9 #define INF 0xFFFF int floyd(int matrix[][MAX], int prevPoint[][MAX], int finalP2V[][MAX]) { int i,j,k; for (i=0; i<MAX; i++) for (j=0; j<MAX; j++) { finalP2V[i][j] = matrix[i][j]; prevPoint[i][j] = j; } for (k=0; k<MAX; k++) for (i=0; i<MAX; i++) for(j=0; j<MAX; j++) { if (finalP2V[i][j] > (finalP2V[i][k]+finalP2V[k][j])) { finalP2V[i][j] = finalP2V[i][k]+finalP2V[k][j]; prevPoint[i][j] = prevPoint[i][k]; } } } int main(int argc, char *argv[]) { int matrix[][MAX] = {{0, 1, 5, INF, INF, INF, INF, INF, INF}, {1, 0, 3, 7, 5, INF, INF, INF, INF}, {5, 3, 0, INF, 1, 7, INF, INF, INF }, {INF, 7,INF, 0, 2, INF, 3, INF, INF}, {INF, 5, 1, 2, 0, 3, 6, 9, INF}, {INF, INF, 7, INF, 3, 0, INF, 5, INF}, {INF, INF, INF, 3, 6, INF, 0, 2, 7}, {INF, INF, INF, INF, 9, 5, 2, 0, 4}, {INF, INF, INF, INF, INF, INF, 7, 4, 0}}; int prevPoint[MAX][MAX] = {0}; int finalP2V[MAX][MAX] = {0}; floyd(matrix, prevPoint, finalP2V); for (int i=0; i<MAX; i++) { for (int j=0; j<MAX; j++) { std::cout << finalP2V[i][j] << " "; } std::cout << std::endl; } }