参考文献:数字图像处理(第三版) 何东健 西安电子科技大学出版社
二值形态学中的运算对象是集合, 但实际运算中, 当涉及两个集合时并不把它们看作是互相对等的。 一般设A为图像集合, S为结构元素, 数学形态学运算是用S对A进行操作。 结构元素本身也是一个图像集合, 不过通常其尺寸要比目标图像小得多。 对结构元素可指定一个原点, 将其作为结构元素参与形态学运算的参考点。 原点可包含在结构元素中, 也可不包含在结构元素中, 但运算的结果常不相同。 以下用黑点代表值为1的区域, 白点代表值为0的区域, 运算对于值为1的区域进行。
1.腐蚀
腐蚀是一种最基本的数学形态学运算。 对给定的目标图像X和结构元素S, 将S在图像上移动, 则在每一个当前位置x, S+x只有3种可能的状态, 如下图所示:

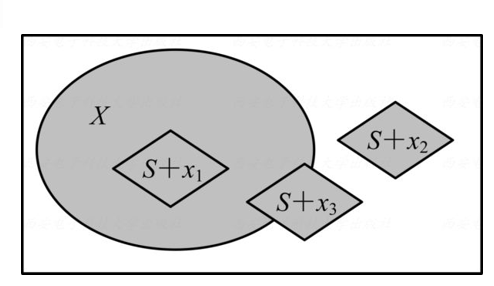
第(1)种情形说明S+x与X相关;
第(2)种情形说明S+x与X不相关;
第(3)种情形说明S+x与X只是部分相关。
因而满足(1)式的点x的全体元素,称该点集为S对X的腐蚀(简称腐蚀, 也称X用S腐蚀),记为![]() 。
。
腐蚀也可以用集合的方式定义:![]()
该式表明, X用S腐蚀的结果是所有使S平移x后仍在X中的x的集合。 换句话说, 用S来腐蚀X得到的集合是S完全包含在X中时S的原点位置的集合。
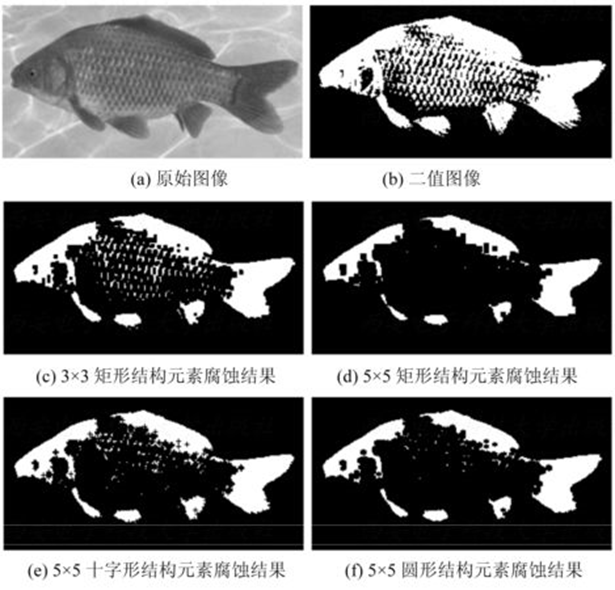
腐蚀在数学形态学运算中的作用是消除物体边界点、 去除小于结构元素的物体、 清除两个物体间的细小连通等。 如果结构元素取3×3的像素块, 腐蚀将使物体的边界沿周边减少1个像素。
“腐蚀”图解:(腐蚀将图像(区域)缩小了)

代码实现:
【注】二值腐蚀基本运算,背景为黑色,目标为白色。


1 //二值腐蚀 2 /*函数参数: 3 a——待腐蚀的图像 4 b——腐蚀后的结果 5 mat[5][5]——结构元素,我这里默认设了5*5的大小 6 */ 7 void Bi_Corrosion(Mat &a, Mat &b, int mat[5][5]) 8 { 9 int i, j, k, o; 10 int rows = a.rows; 11 int cols = a.cols*a.channels(); 12 13 bool flag; 14 15 uchar *dst = b.data; 16 uchar *src = a.data; 17 //针对图像中每一个像素位置,判断是否结构元素能填入目标内部 18 for(i = 2; i < rows-2; i++) { 19 for(j = 2; j < cols-2; j++) { 20 //判断结构元素是否可以在当前点填入目标内部,1为可以,0为不可以 21 flag = 1; 22 for(k = -2; k <= 2 && flag; k++) { 23 for(o = -2; o <= 2; o++) { 24 //如果当前结构元素位置为1,判断与对应图像上的像素点是否为非0 25 if(mat[k+2][o+2]) { 26 //如果图像当前像素为0,则没有击中该点,不是腐蚀的输出 27 if(!*(src+(i+k)*cols+j+o)){ 28 flag = 0; break; 29 } 30 } 31 } 32 } 33 *(dst+i*cols+j) = flag ? 255 : 0; 34 } 35 } 36 }
2.膨胀
腐蚀可以看作是将图像X中每一个与结构元素S全等的子集S+x收缩为点x。 反之, 也可以将X中的每一个点x扩大为S+x, 即膨胀运算, 记为![]() 。用集合语言定义膨胀运算的定义形式为:
。用集合语言定义膨胀运算的定义形式为:![]()
图示:

【注意】来看下特殊情况: 用B膨胀后,结果向左平移了;而用B图像的反射膨胀后位置不变。


对于非对称结构S,膨胀后会使得原图错移,但![]() 膨胀不会,总的位置和形状不变,因此膨胀公式也可以写做:
膨胀不会,总的位置和形状不变,因此膨胀公式也可以写做:
![]()
对集合X的膨胀也可以看做是对集合X补集的腐蚀的补集具有对偶特性:
![]()
腐蚀和膨胀运算与集合运算的关系如下:


代码实现:
【注】二值膨胀基本运算,背景为黑色,目标为白色。
1 //二值膨胀 2 /*函数参数: 3 a——待腐蚀的图像 4 b——腐蚀后的结果 5 mat——结构元素 6 */ 7 void Bi_Expansion(Mat &a, Mat &b, int mat[5][5]) { 8 int i, j, k, o; 9 int rows = a.rows; 10 int cols = a.cols*a.channels(); 11 Mat tmp = a.clone(); 12 uchar* src = tmp.data; 13 //膨胀是对图像中目标补集的腐蚀,因此先求输入图像数据的补集 14 for(i = 0; i < rows; i++) 15 for(j = 0; j < cols; j++) 16 *(src+i*cols+j) = 255 - *(src+i*cols+j); 17 //膨胀是结构元素的对称集对补集的腐蚀,此处求其反射 18 for(i = 0; i < 5; i++) 19 for(j = 0; j <= i; j++) 20 mat[i][j] = mat[j][i]; 21 bool flag; 22 uchar* dst = b.data; 23 //针对图像中每一个像素位置,判断是否结构元素能填入目标内部 24 for(i = 2; i < rows-2; i++) { 25 for(j = 2; j < cols-2; j++) { 26 //判断结构元素是否可以在当前点填入目标内部,1为可以,0为不可以 27 flag = 1; 28 for(k = -2; k <= 2 && flag; k++) { 29 for(o = -2; o <= 2; o++) { 30 //如果当前结构元素位置为1,判断与对应图像上的像素点是否为非0 31 if(mat[k+2][o+2]) { 32 if(!*(src+(i+k)*cols+j+o)){//没击中 33 flag = 0; break; 34 } 35 } 36 } 37 } 38 *(dst+i*cols+j) = flag ? 255 : 0; 39 } 40 } 41 //用结构元素对称集对目标补集腐蚀后,还要对结构再求一次补集,才是膨胀结构输出 42 //赋值结构元素腐蚀漏掉的区域,使原图像恢复为二值图像 43 for(i = 0; i < rows; i++) { 44 for(j = 0; j < cols; j++) { 45 *(dst+i*cols+j) = 255 - *(dst+i*cols+j); 46 if(*(dst+i*cols+j) != 255 && *(dst+i*cols+j) != 0) 47 *(dst+i*cols+j) = 0; 48 } 49 } 50 }