第七章 PWM控制技术
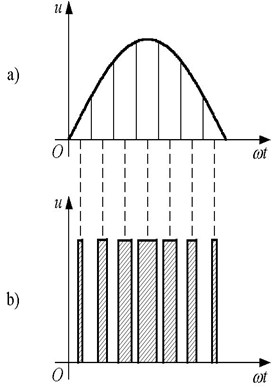
PWM(Pulse Width Modulation)控制就是对脉冲的宽度进行调制的技术,即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。为什么要对脉冲的宽度进行调制呢,这是因为面积等效原理:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。冲量即指窄脉冲的面积。效果基本相同,是指环节的输出响应波形基本相同。如果把各输出波形用傅里叶变换分析,则其低频段非常接近,仅在高频段略有差异。因此我们可以用一系列等幅不等宽的pwm波来代替正弦波(把正弦波看作是N个彼此相连的脉冲宽度为pi/N,但幅值顶部是曲线且大小按正弦规律变化的脉冲序列组成的。如果把上述脉冲列利用相同数量的等幅而不等宽的矩形脉冲代替,使矩形脉冲的中点和相应正弦波部分的中点重合,且使矩形脉冲和相应的正弦波部分面积(冲量)相等,就得到PWM波形。
调制法
把希望输出的波形作为调制信号,把接受调制的信号作为载波,通过信号波的调制得到所期望的PWM波形。 通常采用等腰三角波或锯齿波作为载波,其中等腰三角波应用最多(任一点宽度与高度线性关系,左右对称)。调制法按照载波u在一个ur(调制信号)周期内的极型变化分为单极性和双极型。
单极型 pwm调制方式:
调制信号ur为正弦波,载波uc在ur的正半周为正极性的三角波,在ur的负半周为负极性的三角波。(半个周期单一极性)
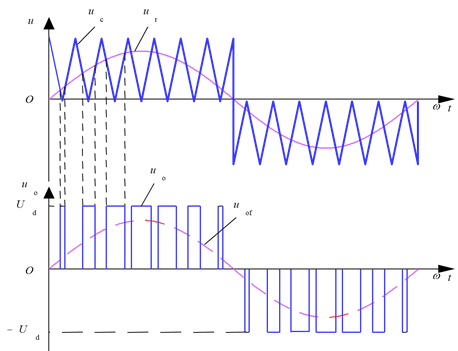
输出的pwm波总是Ur大于Uc的时候才有信号。
双极型:
仍然在调制信号ur和载波信号uc的交点时刻控制各开关器件的通断。 在ur的半个周期内,三角波载波有正有负,所得的PWM波也是有正有负,在ur的一个周期内,输出的PWM波只有±Ud两种电平。在ur的正负半周,对各开关器件的控制规律相同。
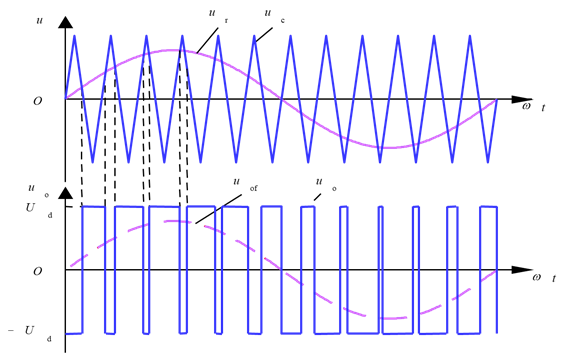
三角波载波在信号波正半周期或负半周期里只有单一的极性,所得的PWM波形在半个周期中也只在单极性范围内变化,称为单极性PWM控制方式。三角波载波始终是有正有负为双极性的,所得的PWM波形在半个周期中有正、有负,则称之为双极性PWM控制方式。
同步调制与异步调制
载波频率fc与调制信号频率fr之比N= fc/fr称为载波比,根据载波和信号波是否同步及载波比的变化情况,PWM调制方式可分为异步调制和同步调制两种。
载波信号和调制信号不保持同步的调制方式称为异步调制。
◆通常保持载波频率fc固定不变,因而当信号波频率fr变化时,载波比N是变化的。
◆在信号波的半个周期内,PWM波的脉冲个数不固定,相位也不固定,正负半周期的脉冲不对称,半周期内前后1/4周期的脉冲也不对称。
◆当fr较低时,N较大,一周期内脉冲数较多,脉冲不对称产生的不利影响都较小,PWM波形接近正弦波。
◆当fr增高时,N减小,一周期内的脉冲数减少,PWM脉冲不对称的影响就变大,输出PWM波和正弦波的差异变大,对于三相PWM型逆变电路来说,三相输出的对称性也变差。
◆在采用异步调制方式时,希望采用较高的载波频率,以使在信号波频率较高时仍能保持较大的载波比。
载波比N等于常数,并在变频时使载波和信号波保持同步的方式称为同步调制。
◆fr变化时载波比N不变,信号波一个周期内输出的脉冲数是固定的,脉冲相位也是固定的。
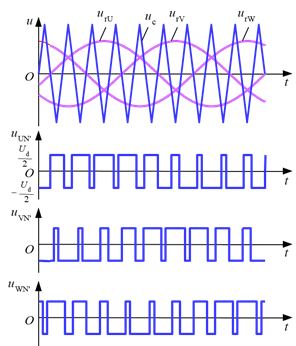
◆在三相PWM逆变电路中,通常公用一个三角波载波,为了使三相输出波形严格对称,一相的PWM波正负半周镜对称,取N为3的整数倍且为奇数。
◆当逆变电路输出频率很低时( fr 低),N不变,故同步调制时的fc也很低。fc过低时由调制带来的谐波不易滤除,当负载为电动机时也会带来较大的转矩脉动和噪声;
当逆变电路输出频率很高时,同步调制时的fc会过高,使开关器件难以承受。 同步调制如下:
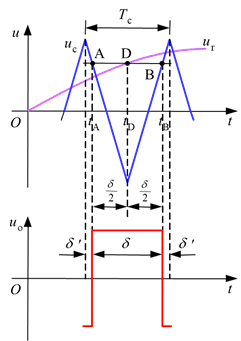
规则采样法
在正弦波和三角波的自然交点时刻控制功率开关器件的通断,这种生成SPWM波形的方法称为自然采样法。
规则采样法 :是一种应用较广的工程实用方法,其效果接近自然采样法,但计算量却比自然采样法小得多。
取三角波两个正峰值之间为一个采样周期Tc,使每个脉冲的中点都以相应的三角波中点(即负峰点)为对称。(比较自然采样)在三角波的负峰时刻tD对正弦信号波采样而得到D点,过D点作一水平直线和三角波分别交于A点和B点,在A点时刻tA和B点时刻tB控制功率开关器件的通断。 可以看出,用这种规则采样法得到的脉冲宽度和用自然采样法得到的脉冲宽度非常接近。 (等腰三角形相似原理)
SVPWM(空间矢量法)
空间矢量SVPWM控制技术广泛运用于变频器中,驱动交流电机时,使电机的磁链成为圆形的旋转磁场(非正弦),从而使电机产生恒定的电磁转矩。
■空间矢量SVPWM控制技术
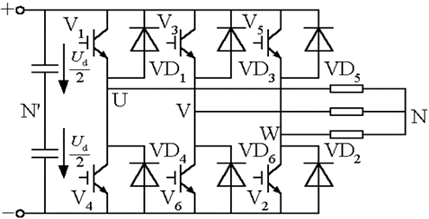
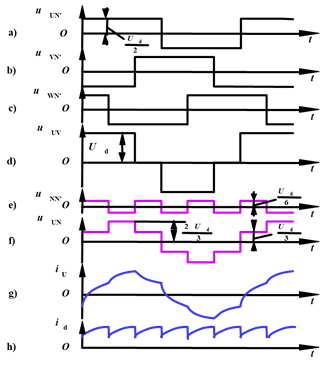
◆图所示的三相电压型桥式逆变电路,采用180°导通方式,共有8种工作状态,即V6、V1、V2通,V1、V2、V3通,V2、V3、V4通,V3、V4、V5通,V4、V5、V6通,V5、V6、V1通,以及V1、V3、V5通和V2、V4、V6通,用"1"表示每相上桥臂开关导通,用"0"表示下桥臂开关导通,则上述8种工作状态可依次表示为100、110、010、011、001、101以及111和000。
◆前6种状态有输出电压,属有效工作状态,而后两种全部是上管通或下管通,没有输出电压,称之为零工作状态,故对于这种基本的逆变器,称之为6拍逆变器。

PWM跟踪控制法
跟踪控制方法:把希望输出的电流或电压波形作为指令信号,把实际电流或电压波形作为反馈信号,通过两者的瞬时值比较来决定逆变电路各功率开关器件的通断,使实际的输出跟踪指令信号变化。
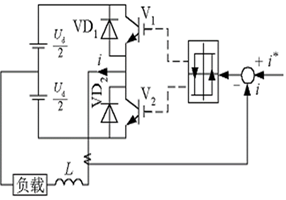
电流跟踪控制中应用最多的是滞环比较方式