按照普通卷积-深度卷积-深度可分离卷积的思路总结。
depthwise_conv2d来源于深度可分离卷积,如下论文:
Xception: Deep Learning with Depthwise Separable Convolutions
函数定义如下:
tf.nn.depthwise_conv2d(input,filter,strides,padding,rate=None,name=None,data_format=None)
除去name参数用以指定该操作的name,data_format指定数据格式,与方法有关的一共五个参数:
input:
指需要做卷积的输入图像,要求是一个4维Tensor,具有[batch, height, width, in_channels]这样的shape,具体含义是[训练时一个batch的图片数量, 图片高度, 图片宽度, 图像通道数]
filter:
相当于CNN中的卷积核,要求是一个4维Tensor,具有[filter_height, filter_width, in_channels, channel_multiplier]这样的shape,具体含义是[卷积核的高度,卷积核的宽度,输入通道数,输出卷积乘子],同理这里第三维in_channels,就是参数value的第四维
strides:
卷积的滑动步长。
padding:
string类型的量,只能是”SAME”,”VALID”其中之一,这个值决定了不同边缘填充方式。
rate:
这个参数的详细解释见【Tensorflow】tf.nn.atrous_conv2d如何实现空洞卷积?
结果返回一个Tensor,shape为[batch, out_height, out_width, in_channels * channel_multiplier],注意这里输出通道变成了in_channels * channel_multiplier
自定义卷积信息做实例:
img1 = tf.constant(value=[[[[1],[2],[3],[4]],[[1],[2],[3],[4]],[[1],[2],[3],[4]],[[1],[2],[3],[4]]]],dtype=tf.float32)
img2 = tf.constant(value=[[[[1],[1],[1],[1]],[[1],[1],[1],[1]],[[1],[1],[1],[1]],[[1],[1],[1],[1]]]],dtype=tf.float32)
img = tf.concat(values=[img1,img2],axis=3)
filter1 = tf.constant(value=0, shape=[3,3,1,1],dtype=tf.float32)
filter2 = tf.constant(value=1, shape=[3,3,1,1],dtype=tf.float32)
filter3 = tf.constant(value=2, shape=[3,3,1,1],dtype=tf.float32)
filter4 = tf.constant(value=3, shape=[3,3,1,1],dtype=tf.float32)
filter_out1 = tf.concat(values=[filter1,filter2],axis=2)
filter_out2 = tf.concat(values=[filter3,filter4],axis=2)
filter = tf.concat(values=[filter_out1,filter_out2],axis=3)
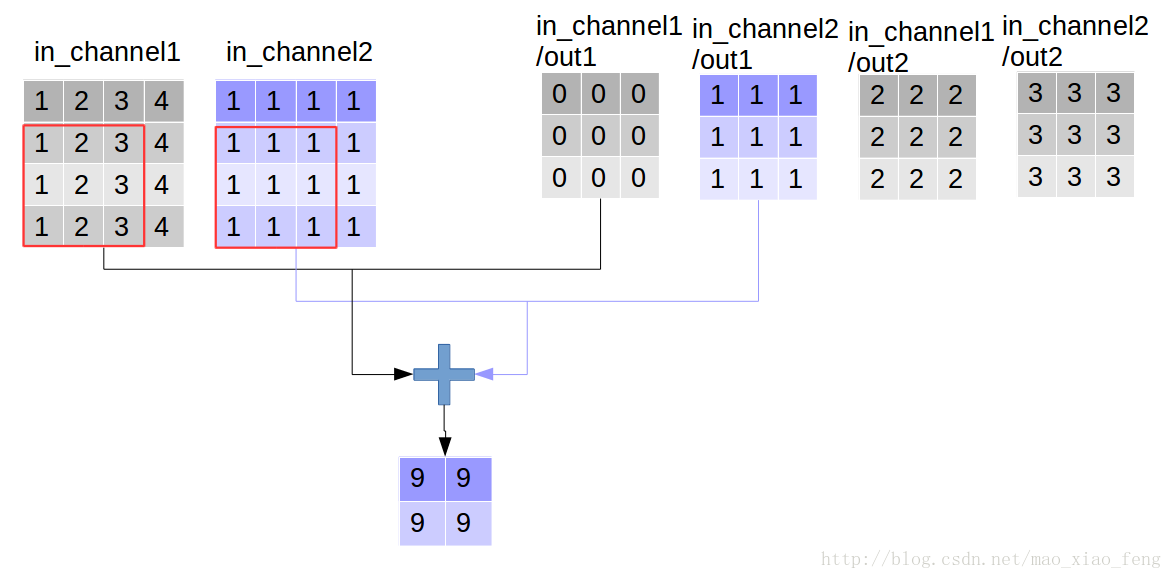
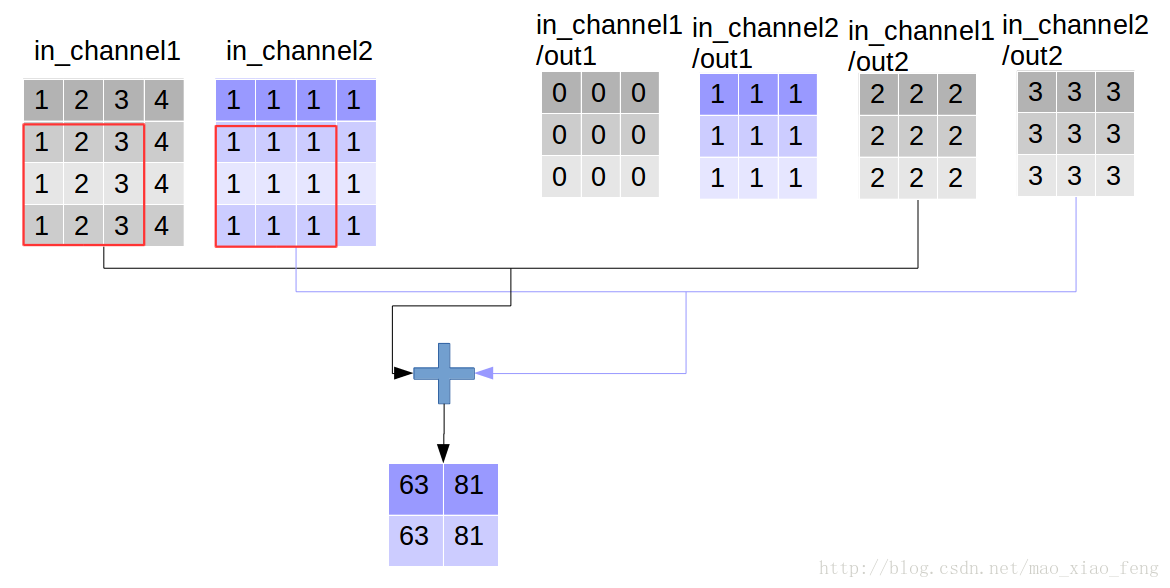
做普通卷积:
out_img = tf.nn.conv2d(input=img, filter=filter, strides=[1,1,1,1], padding='VALID')
普通卷积的实现过程如下系列图:
做深度卷积:
out_img = tf.nn.depthwise_conv2d(input=img, filter=filter, strides=[1,1,1,1], rate=[1,1], padding='VALID')
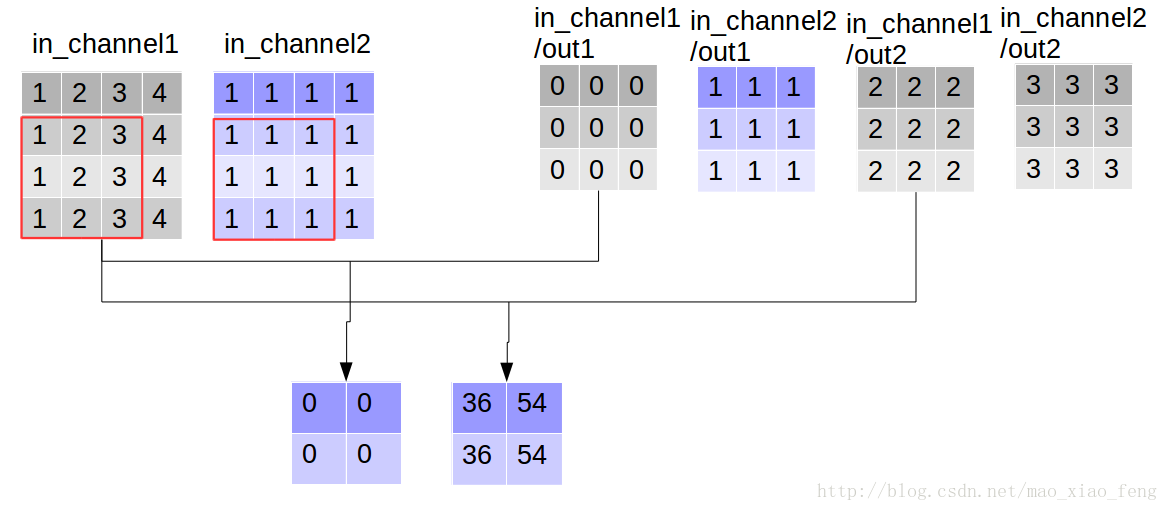

形象的解释一下depthwise_conv2d卷积了。看普通的卷积,我们对卷积核每一个out_channel的两个通道分别和输入的两个通道做卷积相加,得到feature map的一个channel,而depthwise_conv2d卷积,我们对每一个对应的in_channel,分别卷积生成两个out_channel,所以获得的feature map的通道数量可以用in_channel* channel_multiplier来表达,这个channel_multiplier,就可以理解为卷积核的第四维。
做深度可分离卷积:
如下,增加定义了point_filter 核。
import tensorflow as tf
img1 = tf.constant(value=[[[[1],[2],[3],[4]],[[1],[2],[3],[4]],[[1],[2],[3],[4]],[[1],[2],[3],[4]]]],dtype=tf.float32)
img2 = tf.constant(value=[[[[1],[1],[1],[1]],[[1],[1],[1],[1]],[[1],[1],[1],[1]],[[1],[1],[1],[1]]]],dtype=tf.float32)
img = tf.concat(values=[img1,img2],axis=3)
filter1 = tf.constant(value=0, shape=[3,3,1,1],dtype=tf.float32)
filter2 = tf.constant(value=1, shape=[3,3,1,1],dtype=tf.float32)
filter3 = tf.constant(value=2, shape=[3,3,1,1],dtype=tf.float32)
filter4 = tf.constant(value=3, shape=[3,3,1,1],dtype=tf.float32)
filter_out1 = tf.concat(values=[filter1,filter2],axis=2)
filter_out2 = tf.concat(values=[filter3,filter4],axis=2)
filter = tf.concat(values=[filter_out1,filter_out2],axis=3)
point_filter = tf.constant(value=1, shape=[1,1,4,4],dtype=tf.float32)
out_img = tf.nn.depthwise_conv2d(input=img, filter=filter, strides=[1,1,1,1],rate=[1,1], padding='VALID')
做深度分层卷积=做深度卷积,然后做pointwise卷积,因此在上代码添加做pointwise卷积代码即可完成,如下:
out_img = tf.nn.conv2d(input=out_img, filter=point_filter, strides=[1,1,1,1], padding='VALID')
输出:

使用官方函数编码查看结果,即:
out_img = tf.nn.separable_conv2d(input=img, depthwise_filter=filter, pointwise_filter=point_filter,strides=[1,1,1,1], rate=[1,1], padding='VALID')
输出:

ok,愉快地结束。