ROS中阶笔记(七):机器人SLAM与自主导航—SLAM功能包的使用
1 机器人必备条件
1.1 硬件要求
(1)差分轮式机器人,可使用twist速度指令控制
$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear # linear:xyz方向上的线速度,单位是m/s;
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular # angular:xyz方向上的角速度,单位是rad/s。
float64 x
float64 y
float64 z
(2)机器人必须安装激光雷达等测距设备,可以获取环境深度信息。
(3)最好使用正方形和圆形的机器人,其他外形的机器人虽然可以使用但是效果可能不佳。
1.2 深度信息
1.2.1 激光雷达
$ rosmsg show sensor_msgs/LaserScan # 查看激光雷达消息结构
std_msgs/Header header
uint32 seq
time stamp
string frame_id
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
angle_min:可检测范围的起始角度; (—180——180度 )
angle_max:可检测范围的终止角度,与angle_min组成激光雷达的可检测范围;
angle_increment:相邻数据帧之间的角度步长;
time_incremen:采集到相邻数据帧之间的时间步长,当传感器处于相对运动状态时进行补偿使用。
scan_time:采集一帧数据所需要的视觉;
rang_min:最近可检测深度的阈值;
rang_max:最远可检测深度的阈值;
ranges:一帧深度数据的存储数组。
intensities:每个激光点的强度
1.2.2 kinect
Kinect等GRB-D摄像头,也可以通过红外摄像头获取周围环境的深度信息。
depthimage_to_laserscan功能包:将三维点云数据转换为二维激光雷达数据;
<!--depthimage_to_laserscan节点,将点云深度数据转换成激光数据-->
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan" output="screen">
<remap from="image" to="/kinect/depth/image_raw"/>
<remap from="camera_info" to=/kinect/depth/camera_info"/>
<remap froam="scan" to="/scan"/>
<param name="output_frame_id" value="/camera_link"/>
</node>
1.3 里程计信息
$ rosmsg show nav_msgs/odometry
pose:机器人当前位置坐标,包括机器人的XYZ三轴位置与方向参数,以及用于校正误差的方差矩阵
twist:机器人当前的运动状态,包括XYZ三轴的线速度与角速度,以及用于校正误差的方差矩阵。
注意:ROS中所有的坐标系都是右手坐标系。

1.4 仿真环境
在视频中给出了一个仿真环境:
$ roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch # 启动仿真环境
# 使用Building Editor创建仿真环境cloister.world
2 SLAM功能包的使用方法
论文参考:https://openslam-org.github.io/gmapping.html
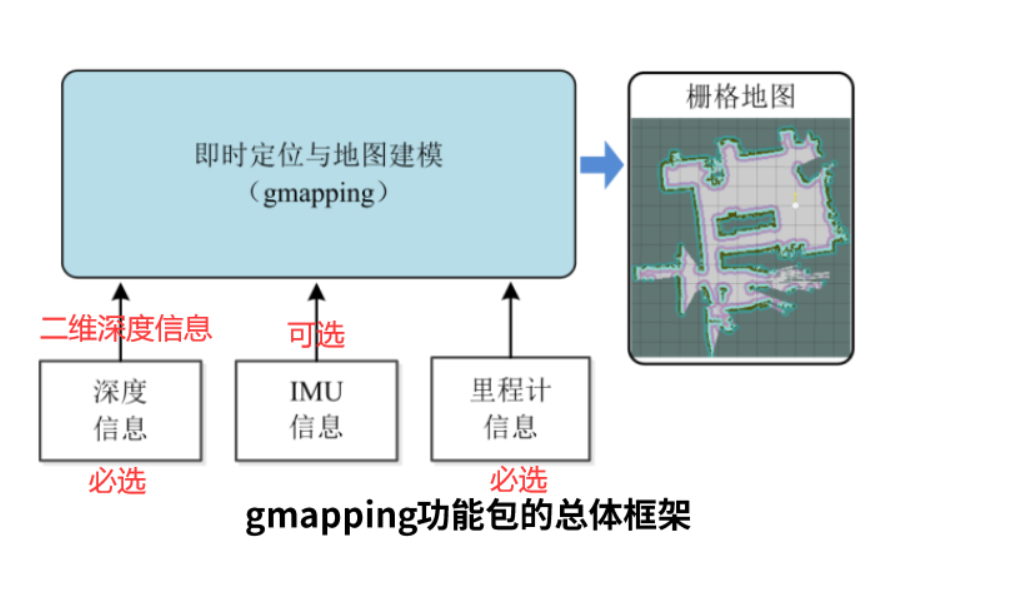
2.1 gmapping
2.1.1 gmapping 功能包
基于激光雷达
Rao-Blackwellized 粒子滤波算法
二维栅格地图
需要机器人提供里程计信息OpenSlam开源算法
输出地图话题:nav_msgs/OccupancyGrid
$ rosmsg show nav_msgs/OccupancyGrid
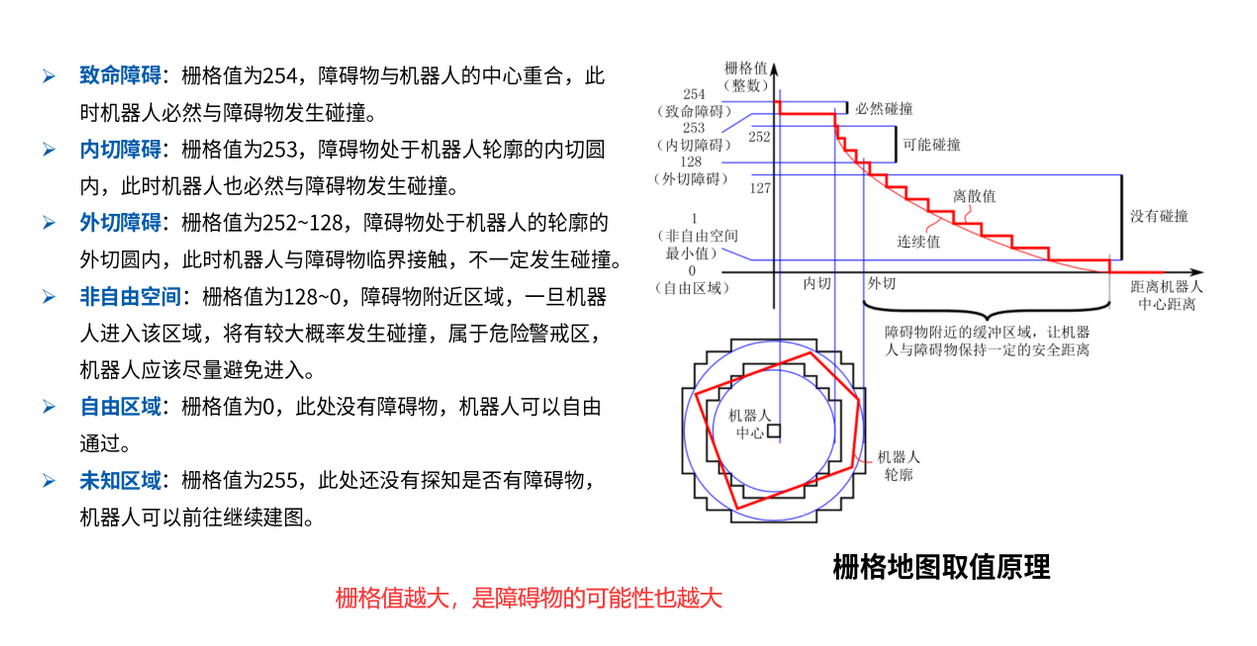
2.1.2 栅格地图取值原理
2.1.3 gmapping安装
$ sudo apt-get install ros-kinetic-gmapping
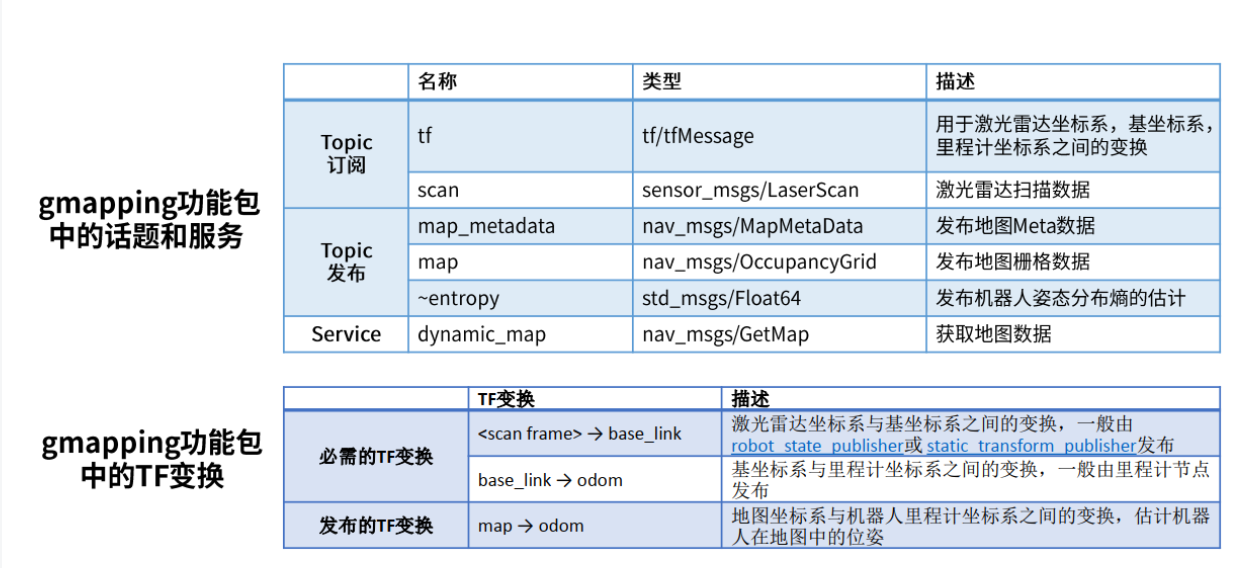
2.1.4 配置gmapping节点
参考: http://wiki.ros.org/gmapping
catkin_ws/src/mbot_navigation/launch/gmapping.launch
<launch>
<arg name="scan_topic" default="scan" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen" clear_params="true">
<param name="odom_frame" value="odom"/>
<param name="map_update_interval" value="5.0"/>
<!-- Set maxUrange < actual maximum range of the Laser -->
<param name="maxRange" value="5.0"/>
<param name="maxUrange" value="4.5"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="80"/>
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
2.1.5 启动gmapping演示(激光雷达)
分别开启三个终端运行以下命令:
$ roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch # 启动仿真环境
$ roslaunch mbot_navigation gmapping_demo.launch # 启动建图节点,灰色地图建成,黑色障碍物
$ roslaunch mbot_teleop mbot_teleop.launch #启动键盘控制节点
建图完毕,保存地图
$ rosrun map_server map_saver -f cloister_gmapping
# cloister_gmapping是文件名的意思,是自己保存文件名的意思
# 保存的路径在当前/home文件夹下,有两个文件.pgm和.yaml
2.1.6 启动gmapping(kinect)
建图效果不佳(不推荐)
$ roslaunch mbot_gazebo mbot_kinect_nav_gazebo.launch
$ roslaunch mbot_navigation gmapping_demo.launch
$ roslaunch mbot_teleop mbot_teleop.launch
2.2 hector_slam
2.2.1 hector_slam功能包
基于激光雷达
高斯牛顿方法
二维栅格地图
不需要里程计数据
输出地图话题:
nav_msgs/OccupancyGrid

2.2.2 安装hector_slam
$ sudo apt-get install ros-kinetic-hector-slam
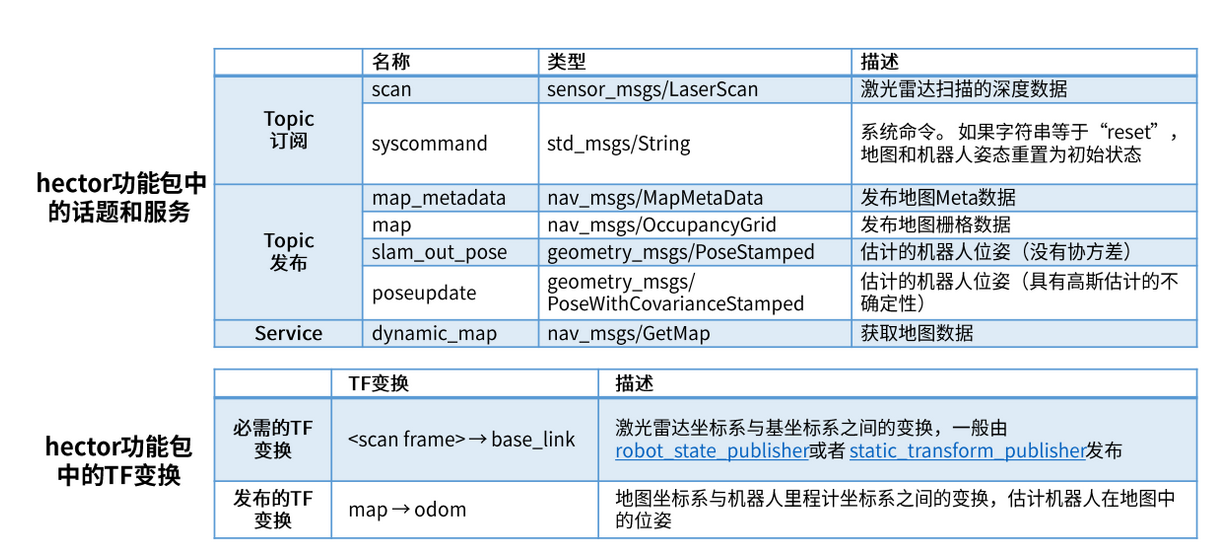
2.2.3 配置hector_mapping节点
参数说明可参考:http://wiki.ros.org/hector_slam
catkin_ws/src/mbot_navigation/launch/hector.launch
<launch>
<node pkg = "hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_footprint" />
<param name="odom_frame" value="odom" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
</launch>
2.2.4 启动hector_slam演示
分别开启三个终端运行以下命令:
$ roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch # 动一个gazebo仿真节点
$ roslaunch mbot_navigation hector_demo.launch # hector建图节点
$ roslaunch mbot_teleop mbot_teleop.launch # 启动一个键盘控制节点
第一个节点启动了gazebo仿真,它使用仿真的雷达给出了一个scan扫描数据;而后下面的节点订阅了这个数据并进行处理,最后得到一个二维栅格地图。
hector这个算法有一个很大的问题,就是在于它的自定位,它利用自身的激光雷达数据进行定位,如果上一次的扫描数据与下一次的扫描数据基本一致的话,它就很难确定自己是否在运动,例如当我给一个足够大的空间,这里有一条没有任何特征点的长廊,长度远远超过激光扫描的最大距离时,hector基本就失去了建图的能力。
2.3 cartographer
2.3.1 cartographer功能包
2016年10月5日,谷歌开源
基于图网络的优化方法
二维或三维条件下的定位及建图功能
设计目的是在计算资源有限的情况下,实时获取相对较高精度的2D地图
主要基于激光雷达
后续会支持更多传感器和机器人平台,同时不断增加新的功能。
2.3.2 cartographer安装
方法一:(新方法)
sudo apt-get update
sudo apt-get install ros-<your ros version>-cartographer* # 安装全部关于cartographer的包
方法二:原来的方法(有好处)
cartographer功能功能包没有集成到ROS的软件源里面,所以需要采用源码编译方式进行安装。为了不与其他安装包冲突,最好为cartographer专门创建一个工作空间,这里我们创建了一个工作空间catkin_google_ws:
1、安装工具:
$ sudo apt-get update
$ sudo apt-get install -y python-wstool python-rosdep ninja-build
2、初始化工作空间:
$ mkdir google_ws # 创建工作空间,名称为google_ws
$ cd google_ws
$ wstool init src
3、设置下载地址(挂VPN最好)
在新建的工作空间下输入下边指令:
# 如果这一步错误,见下面方法一、方法二
$ wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall
$ wstool update -t src
说明:配置Cartographer需要三个包,分别是:Cartographer、Cartographer_ros 和ceres-solver。
方法一:
# 如果无法从google取出代码可以从github提取code:
# 在~/google_ws/src下目录下面ctrl+h打开隐藏文件夹,修改里面第三个包的下载地址:
https://github.com/ceres-solver/ceres-solver.git
方法二:
# 输入完第一个命令后需要改文件的下载地址,另起终端输入:
$ gedit google_ws/src/.rosinstall
# 将最后一个git来源网址由https://ceres-solver.googlesource.com/ceres-solver.git改为https://github.com/ceres-solver/ceres-solver.git 如该果可以挂VPN可以不改。
4、安装功能包依赖
# 安装 proto3.sh
进入protobuf的release版本下载页,link:https://github.com/protocolbuffers/protobuf/releases
# 在google_ws目录下
# protobuf的下载太慢,可以在官网手动下载好,放到cartographer目录下(和src同级,具体操作如下)
$ src/cartographer/scripts/install_proto3.sh
# 安装 deb 依赖,出现错误可以忽略
$ sudo rosdep init
$ rosdep update
$ rosdep install --from-paths src --ignore-src --rosdistro=${kinetic} -y
5、编译功能包
$ catkin_make_isolated --install --use-ninja # 在google_ws目录下,编译
6、在当前终端,设置环境变量
source install_isolated/setup.bash #设置环境变量,在当前终端中设置环境变量,只能在当前终端查找
建议把该句source命令直接写入系统的bashrc环境里
$ vim ./bashrc
source install_isolated/setup.bash # 然后把该句source命令添加到最后一行即可
2.3.3 启动2D、3D 演示
# Download the 2D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
# Launch the 2D backpack demo.
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
# Download the 3D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/with_intensities/b3-2016-04-05-14-14-00.bag
# Launch the 3D backpack demo.
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/b3-2016-04-05-14-14-00.bag
启动Revo LDS demo演示
启动PR2 demo填示
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag
roslaunch cartographer_ros demo_pr2.launch bag_filename:=~/Downloads/2011-09-15-08-32-46.bag
2.3.4 把cartographer功能包运行到自己的机器人上
由于传感器的rostopic不同,我们需要对cartographer订阅的名称进行修改,需要在launch文件中进行修改,但是修改后发现没有任何作用,这是因为修改后需要重新按照上面的流程进行编译安装,这个可能是因为在安装的时候其实已经把launch文件安装到系统中了,所以我们调用的时候还是调用系统中的launch文件
1、配置cartographer节点
mbot_navigation/launch/cartographer_demo_rplidar.launch
2、参数配置
mbot_navigation/config/rplidar.lua
2.3.5 启动cartographer仿真
catkin_make_isolated --install--use-ninja
roslaunch mbot_ gazebo mbot_laser_nav_gazebo.launch
roslaunch cartographer_ros cartographer_demo_rplidar.launch
roslaunch mbot_teleop mbot_teleop.launch
2.4 ORB_SLAM
2.4.1 ORB_SLAM功能包
基于特征点的实时单目SLAM系统
实时解算摄像机的移动轨迹
构建三维点云地图
不仅适用于手持设备获取的一组连续图像,也可以应用于汽车行驶过程中获取的连续图像Raul Mur-Artal,J.M.M.Montiel和Juan D.Tardos于2015年发表在IEEE Transactions on Robotics上
2.4.2 ORB_SLAM2安装
1、安装工具&下载源码:
sudo apt-get install libboost-all-dev libblas-dev liblapack-dev
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2 # 克隆到home下
2、安装eigen3.2.10
去官网下载:http://eigen.tuxfamily.org/index.php?title=Main_Page
解压源码包,并进入目录:
mkdir build
cd build
cmake ..
make
sudo make install
3、编译g2o
cd ~/ORB_SLAM2/Thirdparty/g2o/
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
4、编译DBoW2
cd ~/ORB_SLAM2/Thirdparty/DBoW2/
mkdir build && cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
5、编译Pangolin
sudo apt-get install libglew-dev
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build && cd build
cmake ..
cmake --build .
6、编译ORM_SLAM
cd ~/ORB_SLAM2
mkdir build && cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
7、编译功能包(配置ROS环境)
# 首先修改.bashrc文件
$ cd ~
$ gedit .bashrc
# 打开.bashrc文件在最后一行加入
source ~/ORB_SLAM2/Examples/ROS/ORB_SLAM2/build/devel/setup.bash
$ source ~/.bashrc
$ export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/ggk/ORB_SLAM2/Examples/ROS
$ cd ~/ORB_SLAM2
$ chmod +x build_ros.sh
$ ./build_ros.sh
第7步,编译功能包 出现的问题:
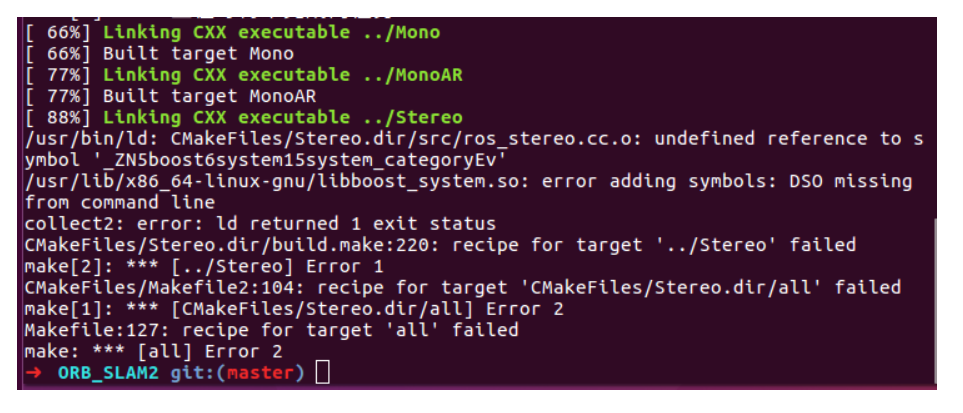
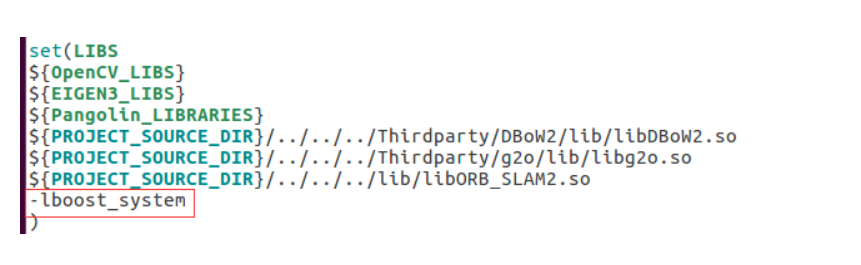
解决方法:
修改 ~/ORB_SLAM2/Examples/ROS/ORB_SLAM2/CMakeLists.txt,添加 -lboost_system
2.4.3 启动单目SLAM示例(基于数据包)
KITTI:http://www.cvlibs.net/datasets/kitti/eval_odometry.php,是室外,双目
1、首先下载数据包TUM:这个主要是室内,单目和RGB-D
https://vision.in.tum.de/data/datasets/rgbd-dataset/download#freiburg1_desk
在ORB-SLAM2下新建文件夹Data,把测试的数据解压在这里。
TUM数据集分为相机fr1,fr2,fr3,对应TUM1-3.yaml;
一般第一次测试用fr1/xyz这个数据集,这个就是x,y,z方向来回动,用来检测一下系统出没出什么问题。
其他的数据看名字就知道,比如desk就是在桌子附近来回转,room就是在房间里面扫来扫去。
值得注意的是,运行其他数据集的时候,单目不一定能追踪成功,在台式机上能成功的在虚拟机上也不一定能成功,这就需要我们进行一些调整,比如调整初始化需求数量等,这个关系到对SLAM系统的理解。
2、分别打开三个终端运行下面的三个命令:
$ roscore
# 进入ORB_SLAM2目录下启动Mono功能节点。
# 看到开启的等待数据的可视化建图界面
$ rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml
# 进入数据包所在目录下,运行命令
# /camera/image_raw表示播放的数据要发布的话题名称,此时可以在界面中看到建图的效果
$ rosbag play rgbd_dataset_freiburg1_desk.bag /camera/rgb/image_color:=/camera/image_raw
PATH_TO_VOCABULARY:算法参数文件,在ORB_SLAM2/Vocabulary中,将其中的压缩包解压即可;
PATH_TO_SETTINGS_FILE:相机参数设置文件,需要对camera进行标定产生,也可以使用ORB_SLAM2/Examples/ROS/ORB_SLAM2中已有的设置文件Asus.yaml。
2.4.4 启动AR示例(基于数据包)
$ roscore
# 进入ORB_SLAM2目录下启动Mono功能节点。
# 看到开启的等待数据的可视化建图界面
$ rosrun ORB_SLAM2 MonoAR Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml
# 进入数据包所在目录下,运行命令
# /camera/image_raw表示播放的数据要发布的话题名称,此时可以在界面中看到建图的效果
$ rosbag play rgbd_dataset_freiburg1_desk.bag /camera/rgb/image_color:=/camera/image_raw
点击界面Insert Cube,看到正方形插入进来,展示AR效果
2.4.5 启动ORB_SLAM示例(真实摄像头)
$ roslaunch mbot_navigation usb_cam_remap.launch
# 进入ORB_SLAM2目录下启动Mono功能节点。
# 看到开启的等待数据的可视化建图界面
$ rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml
2.4.6 启动AR示例(真实摄像头)
摄像头要运动起来,来完成地图构建
$ roslaunch mbot_vision usb_cam_remap.launch
# 进入ORB_SLAM2目录下启动Mono功能节点。
# 看到开启的等待数据的可视化建图界面
$ rosrun ORB_SLAM2 MonoAR Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml
3 参考资料
2.3 参考资料
Compiling Cartographer ROS
https://google-cartographer-ros.readthedocs.io/en/latest/compilation.html#building-installation
ROS slam-google cartographer编译和demo运行
https://blog.csdn.net/x_r_su/article/details/52927564
Google Cartographer安装教程
https://blog.csdn.net/xmy306538517/article/details/81455625
ubuntu18.04配置cartographer
https://blog.csdn.net/SimileciWH/article/details/82939752
微信公众号:喵哥解说
公众号介绍:主要研究机器学习、计算机视觉、深度学习、ROS等相关内容,分享学习过程中的学习笔记和心得!期待您的关注,欢迎一起学习交流进步!同时还有1200G的Python视频和书籍资料等你领取!!!