持续更新ing
关于最新VSLAM进展、语义VSLAM和动态场景下的 VSLAM
https://github.com/1989Ryan/Semantic_SLAM
https://github.com/leggedrobotics/darknet_ros
https://github.com/ros-industrial/industrial_training
https://github.com/yehengchen/Object-Detection-and-Tracking
git clone https://github.com/JotellyBarros/image2rosbag_KITTIodometry cd image2rosbag_KITTIodometry/ python img2bag_kitti_StereoBag.py /home/mate/Downloads/00/ ~/Downloads/00.bag ~/Downloads/00/times.txt
最全知乎专栏合集:编程、python、爬虫、数据分析、挖掘、ML、NLP、DL...
https://www.e-learn.cn/topic/3358044
https://github.com/Ewenwan/Ros
动态场景下的VSLAM
1.
说明:编译ORB_SLAM2和YOLO-DynaSLAM系统时,对依赖进行了适当调整,若是碰到类似问题,可参考我的fork版本ORB_SLAM2、YOLO-DynaSLAM。
使用TUM_RGB-D Dynamic Objects的fr3_walking_xyz数据集进行了实验,并使用TUM
python tools/evaluate_ate.py results/CameraTrajectory_fr3_walking_xyz.txt ~/Downloads/datasets/TUM_RGBD/rgbd_dataset_freiburg3_walking_xyz/groundtruth.txt --plot ORB_SLAM2-fr3_walking_xyz.png 0.730144
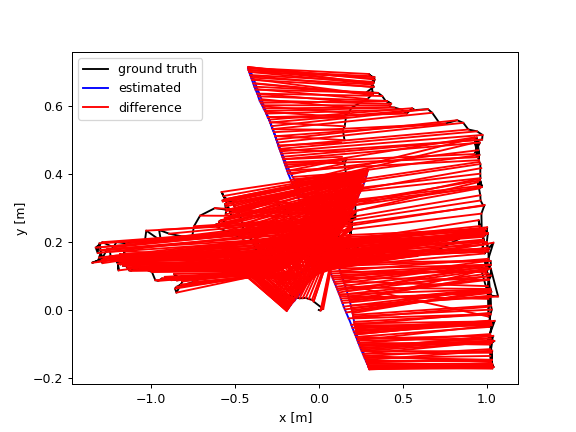
python tools/evaluate_ate.py results/KeyFrameTrajectory_fr3_walking_xyz.txt ~/Downloads/datasets/TUM_RGBD/rgbd_dataset_freiburg3_walking_xyz/groundtruth.txt --plot ORB_SLAM2-Keyframe-fr3_walking_xyz.png 0.654843

python tools/evaluate_ate.py results/CameraTrajectory_fr3_walking_xyz.txt ~/Downloads/datasets/TUM_RGBD/rgbd_dataset_freiburg3_walking_xyz/groundtruth.txt --plot YOLO-DynaSLAM-fr3_walking_xyz.png 0.072051
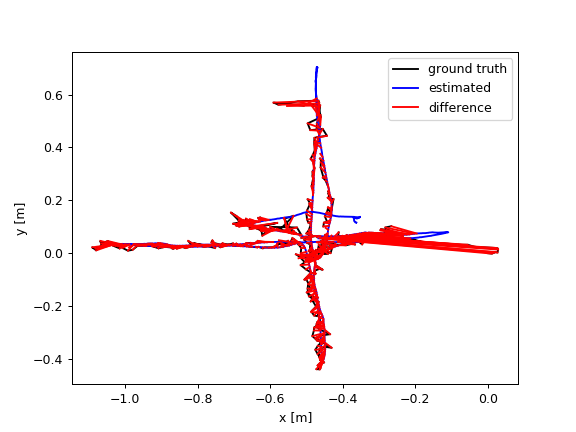
python tools/evaluate_ate.py results/KeyFrameTrajectory_fr3_walking_xyz.txt ~/Downloads/datasets/TUM_RGBD/rgbd_dataset_freiburg3_walking_xyz/groundtruth.txt --plot YOLO-DynaSLAM-Keyframe-fr3_walking_xyz.png 0.093899
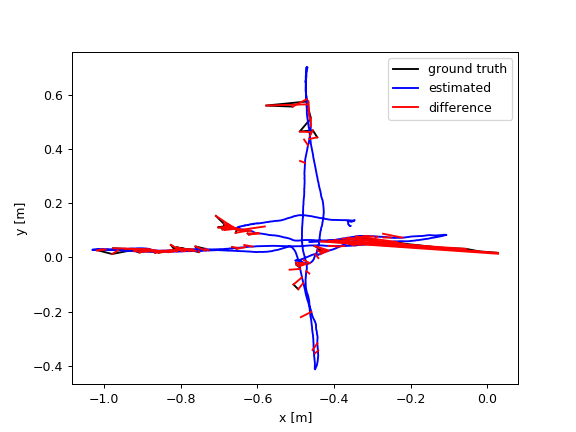
结论:
在动态场景中(以本数据序列为例),
# for melodic sudo apt-get install ros-melodic-geodesy ros-melodic-pcl-ros ros-melodic-nmea-msgs ros-melodic-libg2o cd catkin_ws/src git clone https://github.com/koide3/ndt_omp.git -b melodic git clone https://github.com/SMRT-AIST/fast_gicp.git --recursive git clone https://github.com/koide3/hdl_graph_slam cd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
https://github.com/JimGreenJaguar/hdl_people_tracking/tree/noetic