1.灰度
用黑色为基准色,不同的饱和度的黑色来显示图像。 每个灰度对象都具有从 0%(白色)到100%(黑色)的亮度值。 使用黑白或灰度扫描仪生成的图像通常以灰度显示。
与像素的关系:一般,像素值量化后用一个字节(8b)来表示。如把有黑-灰-白连续变化的灰度值量化为256个灰度级,灰度值的范围为0~255,表示亮度从深到浅,对应图像中的颜色为从黑到白。黑白照片包含了黑白之间的所有的灰度色调,每个像素值都是介于黑色和白色之间的256种灰度中的一种。
2.灰度梯度
把图像看成二维离散函数,灰度梯度其实就是这个二维离散函数的求导,用差分代替微分,求取图像的灰度梯度。常用的一些灰度梯度模板有:Roberts 梯度、Sobel 梯度、Prewitt 梯度、Laplacian 梯度。
对一幅数字图像 f(x,y),其梯度计算公式:
由于数字图像是离散的二维图像,故用差分代替微分

2.1Sobel梯度
计算公式如下:
对应的矩阵如下:

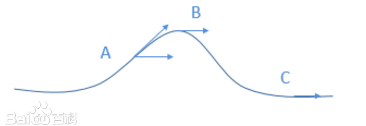
2.2梯度角、梯度方向
|
以Sobel 梯度计算来解释:
首先计算出
|
2.3应用
|
灰度梯度常用于边缘检测。
随着图像检测技术的发展,视觉检测的应用研究在各个领域受到了广泛关注。视觉检测原理是以图像为信息载体并从中提取几何参数。在视觉检测领域中,被测图像边缘的定位精度往往直接影响到整个检测的精度。因此,对图像边缘的精确定位具有很大的实际意义。
传统的边缘检测算法是利用一阶和二阶微分算子考察图像的每个像素在某个区域内的灰度变化,如Canny算子 、Sobel算子 、LOG算子、Laplacian算子等,这些算子大都为整像素级,形式简单,边缘检测的速度快,但容易受到噪声的影响,定位精度较差。随着对边缘检测精度要求的不断提高,传统的边缘检测算法已经很难满足实际需求。因此,定位精度更高的亚像素边缘检测越来越受到人们的关注。
|