(1)用IMU来进行预测
读入一个10/20帧的数据集,通过IMU来初步预测出位姿以及显示其路径。
(2)通过光度差或者什么来作为更新部分,通过相机的观测方程算出增益,随后进行更新。
A. Filter Initialization
误差状态的运动方程
2.1连续时间的IMU系统动态方程
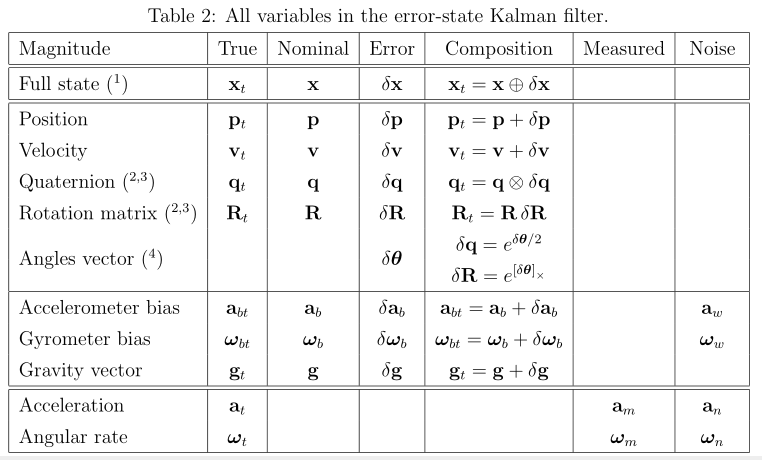
这里涉及到真实值(true-),标称值(nominal-),和误差状态值(error-state)三个量,真实值是有标称值和误差值组合而来。标称值是有非线性方程而来的"大信号",误差值的线性方程而来满足线性高斯滤波的“小信号”。
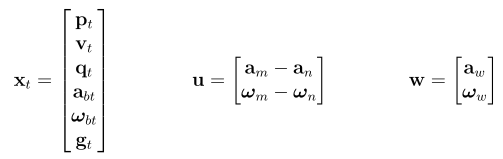
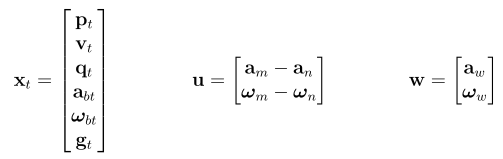
2.1.1相关变量
- 这里的相关变量中,输入值是IMU的测量值,以及当地重力加速度。其他真值值变量的值都是由他们而来。其中normal值是一个抽象变量,表示理想值,是无法估计的,在融合中我们使用估计的真实值做为标称值来预测。
- 标称值是完全理想值,我们把各种因素产生的真实值和标称值的不确定性归于变量表示。
- 这里采用Hamilton 四元数的表述方法
- 这里的角速率使用的是locally的表述,这样可以直接使用机体系b下的传感器测量值
- 这里的角度误差使用的也是locally的表述,这是很多文献和算法采用的经典方式,不过有证明说采用globally的方式定义的角度误差有更好的性质。
- 这里的加速度定义的是globally,我的理解是,方便计算导航系下的速度和位置。
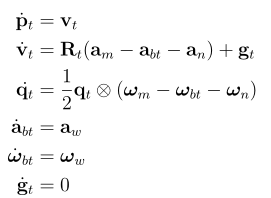
2.1.2真实状态运动方程(true-state kinematics equations )
- true-state 变量表示的运动方程.IMU bias的噪声定义为随机游走。
-
由于初始状态姿态未知,这种不确定即重力加速度向量的不确定,但是实际工程中我们是制定初始状态的,即重力加速度不确定不再存在,这里的方程也认为其为恒定值。
-
.IMU误差来源分为两种,内部bias
-
这里的IMU真实值是没有bias和测量噪声的值,IMU加速度计测量加速度不包含重力加速度,即如果自由落体运动,不考虑噪声加速度计的读数是0。
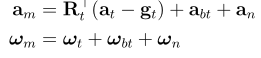
利用IMU测量代替真实值的系统真实状态运动方程,该方程状态为,由IMU的含噪声测量值驱动,并受高斯白噪声干扰.