本节介绍马达的基本概念和参数,简单提及交流异步马达的工作原理及参数。
1.马达是什么?
2.马达的分类
3.生活中有哪些地方会用到马达?
4.异步感应马达
1.马达是什么?
马达是一种提供动能的装置。 涉及电、磁、力、机械的混合。

图(1)交流马达
铭牌:上边标注有马达的各种参数。
1.1供电电压。
供电电压分为交流电和直流电。
交流电又分为单相电(民用)和三相电(工业用)。
不同国家有不同的标准,如中国大陆是220V,香港是230V,日本是100~110V, 美国是120V,韩国部分地区用90V。
为什么不同国家供电电压不同?
一般讲,超高压传输有利于降低损耗,但是发达国家用低压也可以将损耗降到很低。 原因如下:
P = U * I
发电厂功率P一定的情况下,U越高,I越小,像中国,有的高压线为了降低成本是用的铝线,有的则是用的铜线。它们都是有内阻的,
有内阻的话就会发热。 Q = I2R; 可以将损耗降低。
到各个小电站的时候,再通过变压器将超高压转换为民用电压。
做开关电源的话会有这样的经历:很多时候器件上100V电压的话不会有什么问题,但是不注意的情况下,一旦将电压升到交流220V,整个板子就炸掉了。
这就说明,供电电压越高,要求板子承受的抗应力(压力)能力要强。
1.2额定电流。
1.3功率
负载功率越大,要求马达的输出功率越大。比如电动汽车,坐的人越多就要求马达输出的功率越大。
1.4效率
既然有输出功率又有输入功率,必然就会有效率的问题。
Pin/Pout 称为马达的效率。效率越高的话,马达不会发热;效率越高的话,马达越热。
1.5功率因数
功率因数一般是针对交流电谈的,直流电不谈功率因数。
我们希望电流和电压是同相位的。如果完全做到同相位,那么它的功率因数越高; 如果不是同相位,功率因数自然就会降低。
1.6扭力
考虑负载多重,负载越重,要求马达的扭力越大。
1.7转速
除此以外,还要注意马达的体积和安装尺寸孔。
2.马达的分类:
1 |---同步马达 2 | (根据定子和 3 |交流马达--- | 转子是否同步 4 | | 区分) 5 | | 6 | | 7 | | |--- 鼠笼式马达 8 | |---异步马达 ---- | (根据转子的制作方式) 9 | | 10 | |--- 绕线式马达 11 | 12 马达---------| 13 | 14 | 15 |直流马达 16 17 18 19 |---单相交流马达------- 主要研究异步感应马达( 比如洗衣机,电冰箱,水泵 ) 20 | (根据电压角度区分) 21 交流马达---- | 22 | 23 |---三相交流马达
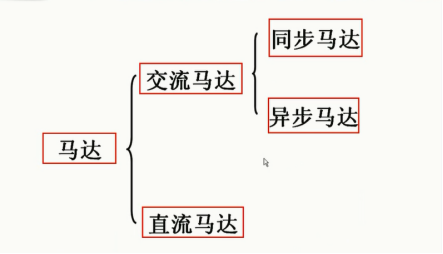
马达分类
从供电电压方面区分,马达分为直流马达和交流马达。其中,交流马达又分为同步马达和异步马达。
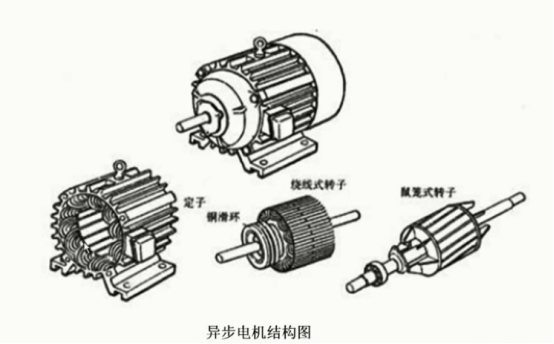
异步电机结构图
实际中用交流马达是主流,但是现在直流马达的应用呈现上升趋势。
2.1AC马达特点:
(缺点)AC马达损耗高,效率低 ===> 这就表明输出功率相同的情况下,它的体积比较大。===> 成本高
(优点)控制简单,结构简单,寿命长。
2.2绕线式马达转子上也是需要绕线圈的,并且转子上绕的是一种漆包线。既然是漆包线,就会存在断裂和损伤的情况。
包括温度上升时,漆包线表面的绝缘等级就会下降。比如在一些高温高湿的情况下,或者在煤炭领域里边,会不适用。
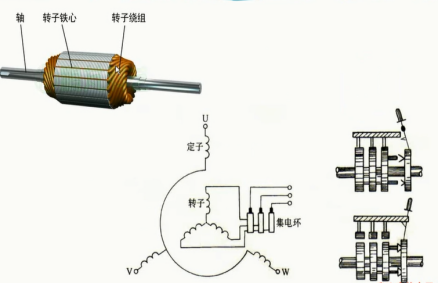
绕线式马达
2.3鼠笼式马达:
转子绕组不是由绝缘导线绕制而成,而是铝条或铜条与短路环焊接而成或铸造而成的三相异步电动机称为鼠笼式电机。
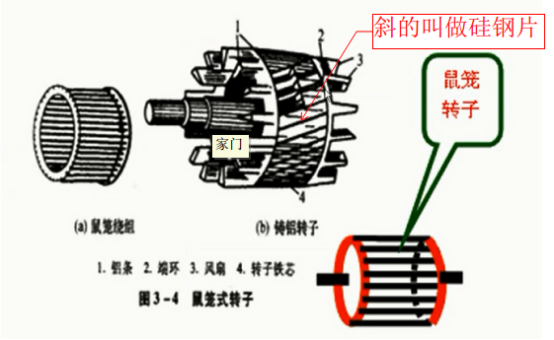
鼠笼式马达转子
为什么硅钢片是斜的?
主要是考虑到马达会遇到锯齿波,还有三次谐波,对马达来讲锯齿波会产生震荡,这种震荡对转子的结构和电机来讲都会有破坏性的作用。
为了减少这种破坏性的作用,所以通过工艺上的改进,将硅钢片改成斜的,从而减少了锯齿波对马达转子和可靠性的破坏。
2.4 无论是鼠笼式马达还是绕线式马达,都会有定子存在,定子上也是有硅钢片的,通过做一些凹槽来增加定子的散热面积。
3.生活中有哪些地方会用到马达?

迷你型的马达驱动器
宝马冷却系统中用到的BLDC直流驱动器,供电电压12V,功率达到400W~450W,至少过流40A。
4.异步感应马达:
异步感应马达:
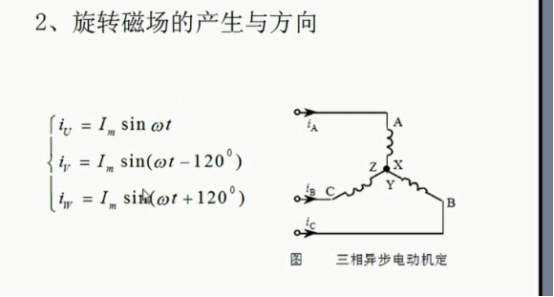
单项异步感应马达在结构上分为定子、转子。定子部分绕线包括主绕组和辅绕组。
电角度相差90°进行安装,通电相序上相位角相差90°,那么就让气隙磁场产生一个正圆旋转磁场,
转子就会切割磁场,切割磁场就会产生电流,从而产生力,这样拖动转子运转。
那么怎么让L、N在相序上相差一个90°呢?
可以在L线上串一个电容,电容可以让电角度提前90°。从而在定子的周围产生旋转的正圆磁场。
由于铜线会有内阻存在,实际上,通电相序达不到90°,所以实际上产生的是一个旋转的椭圆磁场。
所谓异步是因为转子的旋转速度始终小于定子的旋转磁场,我们就认为它们之间的运动不同步。
4.1.基本原理:

4.2.旋转磁场的产生与方向
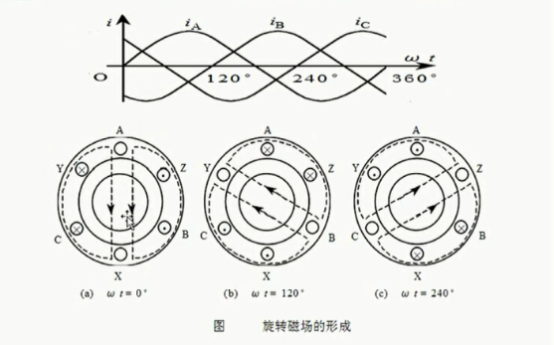
4.3.三相异步马达电机的极数与转速
(1)极数p: θ = 120°/p
(2)转速n: n0 = 60*f1/p
单位是rpm,60是60秒, 对于交流电来将的话,f1=50Hz,即每秒50Hz,假如再是1对极,那么n0 = 60*50/1 = 3000 转 (rpm)
如果是1对极的话,空载的情况下转子的转速是接近3000转,但是不能等于3000转,因为等于3000的话,转子和旋转磁场之间没有相对切割。
有负载的情况下,转速大大降低,而且负载越重,转速掉的越厉害。
因为转子转速与磁场旋转速度差的越多,切割磁场会越多,相应产生的力越大。输出越负载越重的话,转子要调整转速使速度差增大,
这样才能带动负载。
(3)极数s: s = (n0-n)/n0 = Δn / n0
一般都是做一对极,一对极就是N和S两个极。
注:BLDC,无刷直流电机(Brushless Direct Current Motor, BLDCM)