//FilterKalman.cs namespace FusionFiltering { public class FilterKalman { private double A = 1; private double B = 0; private double H = 1; private double R; private double Q; private double cov = double.NaN; private double x = double.NaN; public FilterKalman(double R, double Q, double A, double B, double H) { this.R = R; //过程噪声 this.Q = Q; //测量噪声 this.A = A; //状态转移矩阵 this.B = B; //控制矩阵 u为控制向量 this.H = H; //将估计范围与单位转化为与系统变量(或者说测量值)一致的范围与单位 this.cov = double.NaN; this.x = double.NaN; // estimated signal without noise } public FilterKalman(double R, double Q) { this.R = R; this.Q = Q; } public double filter(double measurement, double u) { if (double.IsNaN(this.x)) { this.x = (1 / this.H) * measurement; this.cov = (1 / this.H) * this.Q * (1 / this.H); } else { double predX = (this.A * this.x) + (this.B * u); double predCov = ((this.A * this.cov) * this.A) + this.Q; // Kalman gain double K = predCov * this.H * (1 / ((this.H * predCov * this.H) + this.Q)); // Correction this.x = predX + K * (measurement - (this.H * predX)); this.cov = predCov - (K * this.H * predCov); } return this.x; } public double filter(double measurement) { double u = 0; if (double.IsNaN(this.x)) { this.x = (1 / this.H) * measurement; this.cov = (1 / this.H) * this.Q * (1 / this.H); } else { double predX = (this.A * this.x) + (this.B * u); double predCov = ((this.A * this.cov) * this.A) + this.R; // Kalman gain double K = predCov * this.H * (1 / ((this.H * predCov * this.H) + this.Q)); // Correction this.x = predX + K * (measurement - (this.H * predX)); this.cov = predCov - (K * this.H * predCov); } return this.x; } public double lastMeasurement() { return this.x; } public void setMeasurementNoise(double noise) { this.Q = noise; } public void setProcessNoise(double noise) { this.R = noise; } } }
//ProgramTestData.cs using System; using System.Linq; namespace FusionFiltering { public class ProgramTest { /// <summary> /// kalman滤波测试1 /// </summary> [System.Diagnostics.Conditional("DEBUG")] public static void TestKalmanFilter1() { Console.WriteLine("FilterKalman Usage"); FilterKalman test = new FilterKalman(0.008, 0.1); double[] testData = { 66, 64, 63, 63, 63, 66, 65, 67, 58 }; foreach (var x in testData) { Console.WriteLine("Input data: {0:#,##0.00}, Filtered data:{1:#,##0.000}", x, test.filter(x)); } } /// <summary> /// Example Usage with controlled input /// </summary> [System.Diagnostics.Conditional("DEBUG")] public static void TestKalmanFilterWithControlled() { Console.WriteLine("FilterKalman Usage with controlled input"); FilterKalman test = new FilterKalman(0.008, 0.1, 1, 1, 1); double[] testData = { 66, 64, 63, 63, 63, 66, 65, 67, 58 }; double u = 0.2; foreach (var x in testData) { Console.WriteLine("Input data: {0:#,##0.00}, Filtered data:{1:#,##0.000}", x, test.filter(x, u)); } } } }
//Program.cs using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading.Tasks; using FusionFiltering; namespace ConsoleApplication1 { class Program { static void Main(string[] args) { ProgramTest.TestKalmanFilter1(); Console.ReadKey(); Console.WriteLine(); ProgramTest.TestKalmanFilterWithControlled(); Console.ReadKey(); } } }
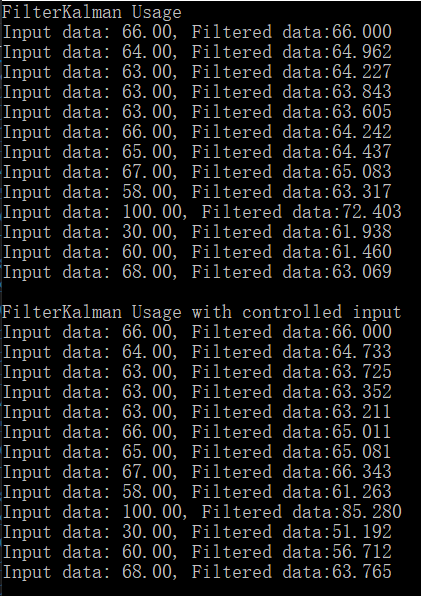
效果: