引
这篇文章,讨论的是这样的一个问题:
有这样的一个矩阵(M in mathbb{R}^{n_1 imes n_2}),它由一个低秩的矩阵(L_0)和稀疏矩阵(S_0)混合而成,那么,能否通过(M)将(L_0)和(S_0)分别重构出来?而且,最关键的是,也是这篇文章的亮点所在:对于(L_0)和(S_0)仅有一丢丢的微弱的假设。
一些微弱的假设:
关于(L_0):
低秩矩阵(L_0)不稀疏,这个假设很弱,但有意义。因为如果(M=e_1e_1^*)(文章采用(*)作为转置符号,这里沿用这种写法),即只有左上角第一个元素非零,那么这个矩阵如何分解为低秩和稀疏呢,因为压根没法区分。作者引入incoherence condition(不连贯条件?抱歉,不晓得如何翻译):
假设(L_0)的SVD分解为:
其中(r = mathrm{rank}(L_0)),(sigma_i)为奇异值,并且,(U = [u_1, ldots, u_r]),(V = [v_1, ldots, v_r])。
incoherence condition:
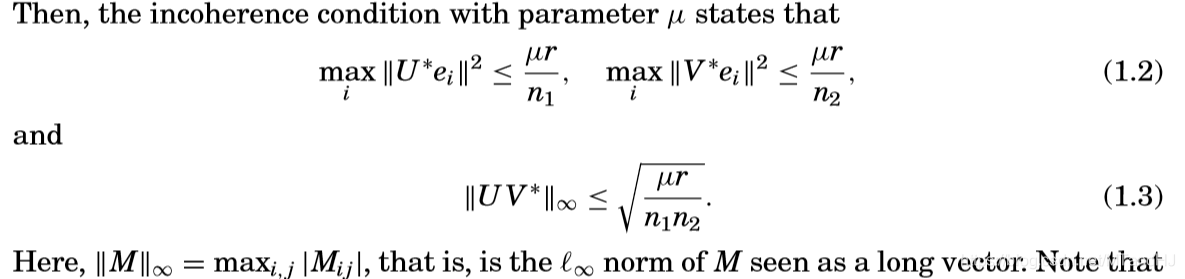
分析这些条件可以发现,(U,V)的每一行的模都不能太大,(UV^*)的每个元素同样不能太大,所以最后结果(L_0)的各个元素的大小会比较均匀,从而保证不稀疏?
关于(S_0):
类似地,需要假设(S_0)不低秩,论文另辟蹊径,假设(S_0)的基为(m=mathrm{Card}(S_0)),其支撑(support)定义为:
论文假设(S_0)的支撑(Omega)从一个均匀分布采样。即,(S_0)不为零的项为(m),从(n_1 imes n_2)个元素中挑选(m)个非零的组合有(mathrm{C}_{n_1 imes n_2}^m),论文假设每一种组合被采样的概率都是相同的。事实上,关于(S_0)元素的符号,论文在后面说明,符号固定或者随机(服从伯努利分布),都能将(L_0,S_0)恢复出来。
问题的解决
论文反复强调,多么令人惊讶,多么不可思议,事实上的确如此,上述问题只需求解一个形式非常简单的凸优化问题:

其中(|L|_* = sum limits_{i=1}^r sigma_i(L))为其核范数。
论文给出了以下结论:
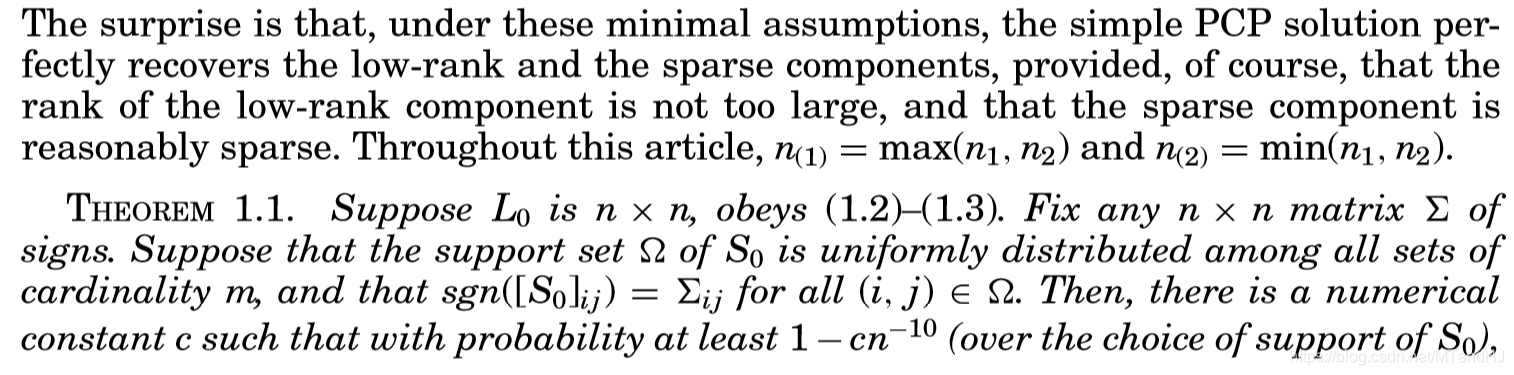
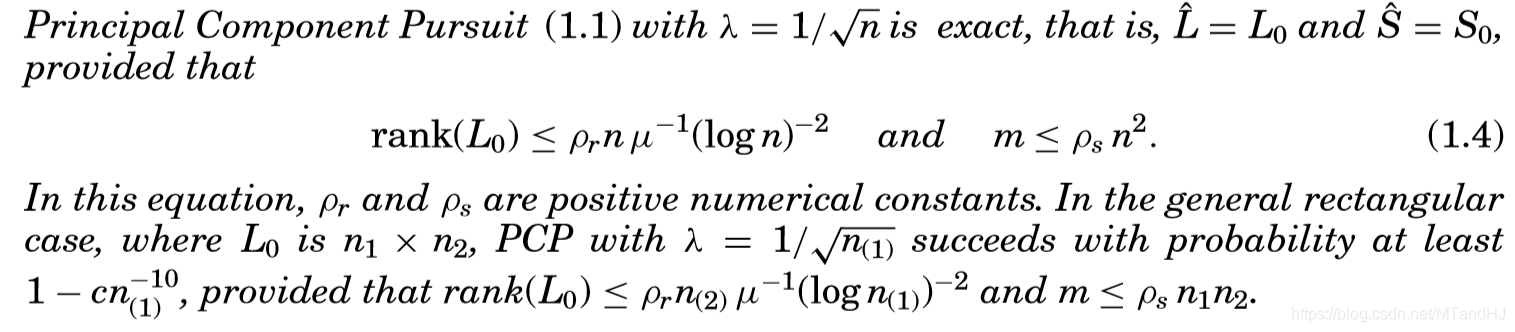
即:令(n_{(1)}= max(n_1, n_2), n_{(2)} = min (n_1, n_2)),对于任意矩阵(M = L_0 + S_0 in mathbb{R}^{n_1 imes n_2}),只要(L_0)和(S_0)满足上面提到的假设,那么就存在常数(c)使得,PCP的解(即(1.1)的解,且(lambda= 1/ sqrt{n_{(1)}}))(hat{L})和(hat{S})有(1-c n_{(1)}^{-10})的概率重构(L_0),(S_0),即(hat{L}=L_0),(hat{S}=S_0)。并且有下列性质被满足(mathrm{rank}(L_0) le
ho_r n_{(2)} mu^{-1} (log n_{(1)})^{-2},m le
ho_s n_1 n_2)。
这个结果需要说明的几点是,常数(c)是根据(S_0)的支撑(Omega)决定的(根据后面的理论,实际上是跟(|mathcal{P}_{Omega} mathcal{P}_{T}|)有关),另外一点是,(lambda = 1 / sqrt{n_{(1)}})。是的,论文给出了(lambda)的选择(虽然这个选择不是唯一的),而且,这个值是通过理论分析得到的。
关于问题 (1.1)的求解有很多现成的算法,这篇论文大量篇幅用于证明上述的理论结果,只在最后提到利用ALM(Augmented Largrange multiplier)方法有很多优势,算法如下:
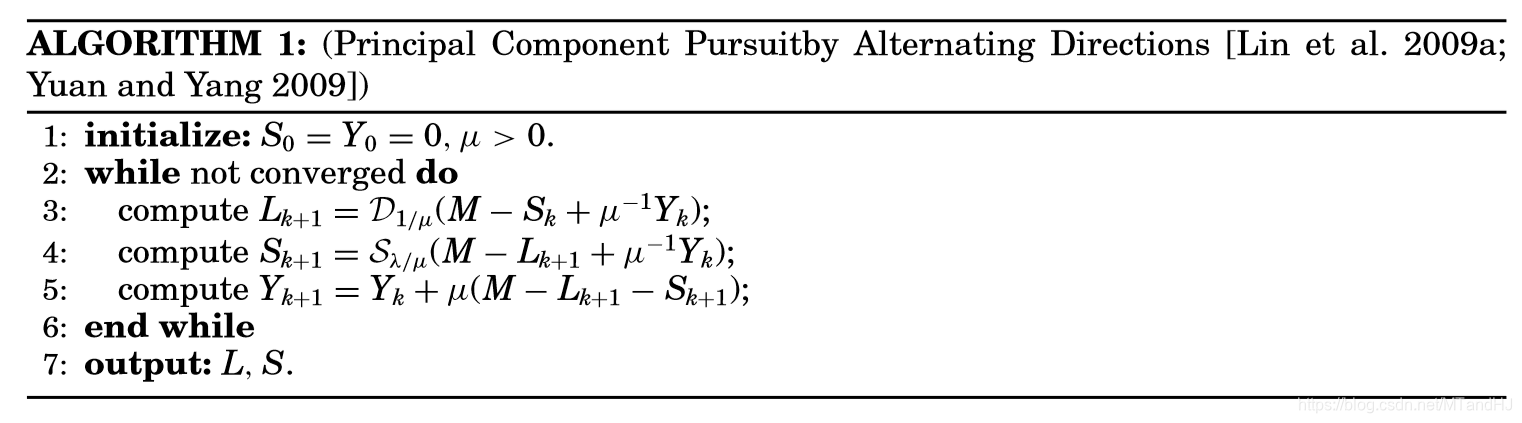
其中(mathcal{S}_{ au}[x] = mathrm{sgn} (x) max (|x| - au, 0)), (mathcal{D}_{ au} (X)=Umathcal{S}_{ au}(Sigma)V^*,X=USigma V^*)。
ALM算法实际上是交替最小化下式:

其中(<A, B>:= mathrm{Tr(A^TB)})。
固定(L, Y),实际上就是最小化:
其在(S)处的导数(虽然有些点并不可导)为:
实际上,对于每个(S_{i,j}),与其相关的为:
关于最小化这个式子,我们可以得到:
实际上就是(S_{i,j}= mathcal{S}_{c/2a}(-b/2a)),对(S)拆解,容易得到固定(L,Y)的条件下,(S)的最优解为:
当(S, Y)固定的时候:
实际上就是最小化下式:
观测其次梯度:
其中(L=USigma V^*,U^*W=0,WV=0,|W| le 1),(|X|)为(X)的算子范数。
最小值点应当满足(0)为其次梯度,即:
有解。
令(A = M-S+mu^{-1}Y)
则:
假设(A=U_ASigma_A V_A^*),那么:
如果我们令(U=U_A,V=V_A),则:
但是我们知道,(Sigma)的对角元素必须大于等于0,所以我可以这样构造解:
假设(Sigma_A)的对角元素,即奇异值降序排列(sigma_1(A) ge sigma_2(A) ldots sigma_k(A) ge mu^{-1} > sigma_{k+1}(A) ge ldots ge sigma_r(A)),相对于的向量为(u_1(A),ldots,u_r(A))和(v_1{A},ldots, v_r(A))。我们令
容易验证(U^*W=0,WV=0),又(mu^{-1} > sigma_i(A), i > k),所以(mu sigma_i(A) < 1),所以(|W| le 1)也满足。同样的,次梯度为0的等式也满足,所以(L)就是我们要找到点(因为这个是凸函数,极值点就是最小值点)。
理论
这里只介绍一下论文的证明思路。
符号:
去随机
论文先证明,如果(S_0)的符号是随机的(伯努利分布),在这种情况能恢复,那么(S_0)的符号即便不随机也能恢复。

Dual Certificates(对偶保证?)
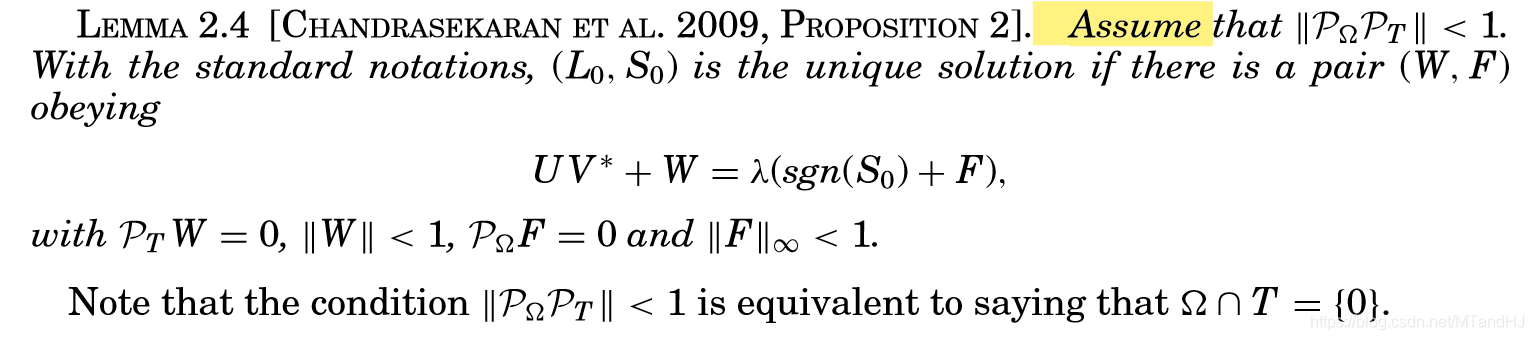
引理2.4
引理2.4告诉我们,只要我们能找到一对((W, F)),满足(UV^*+W=lambda(sgn(S_0)+F))。((L_0,S_0))是优化问题(1.1)的唯一解。但是不够,因为这个条件太强了,(W, F)的构造是困难的。
引理2.5
进一步改进,有了引理2.5。

引理2.5的意义在哪呢?它意味着,我们只要找到一个(W),满足:

那么,((L_0,S_0))就是问题((1.1))的最优解,而且是唯一的。
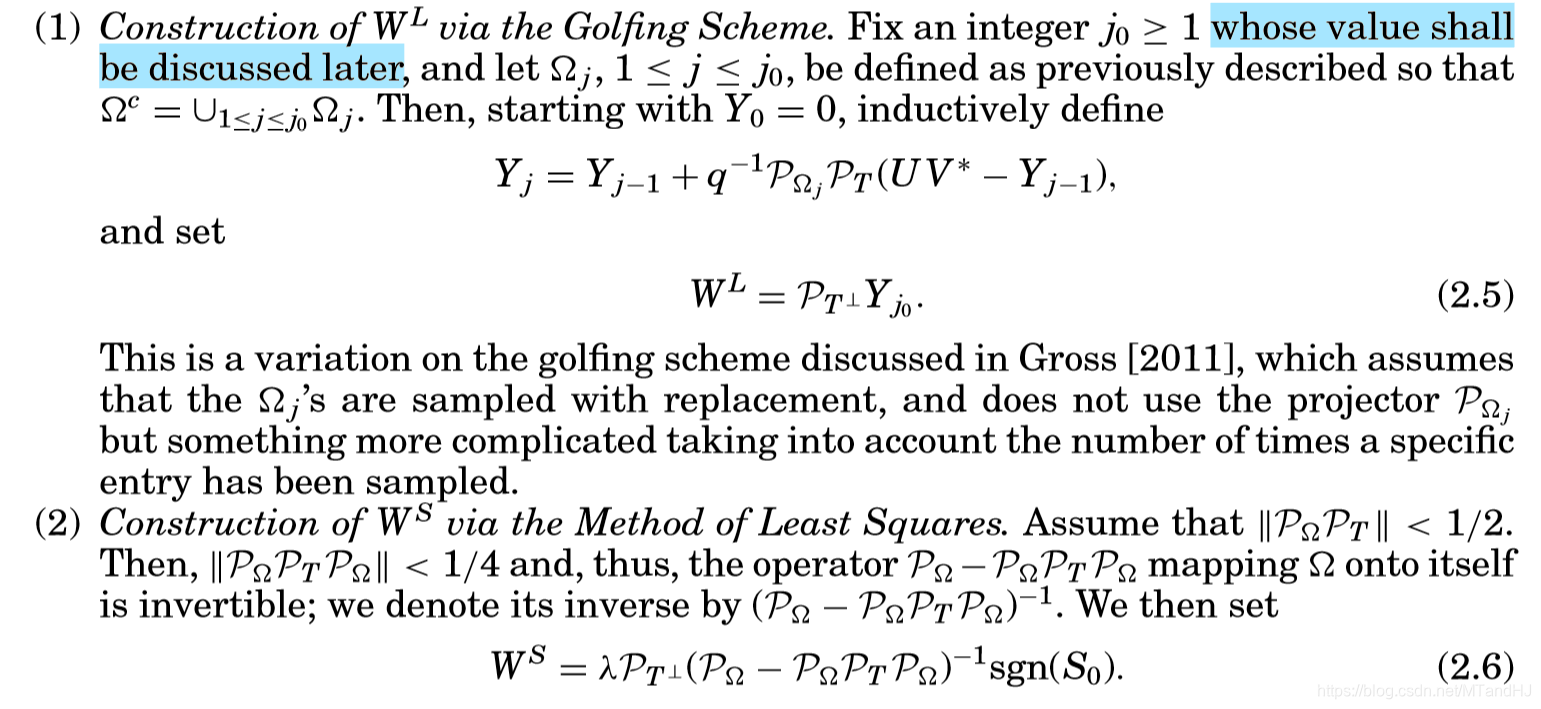
Golfing Scheme
接下来,作者介绍一种机制来构造(W),并且证明这种证明能够大概率保证(W)能够满足上述的对偶条件。作者将(W = W^L + W^S)分解成俩部分,俩部分用不同的方式构造:
接下的引理和推论,总结起来便是最后的证明:



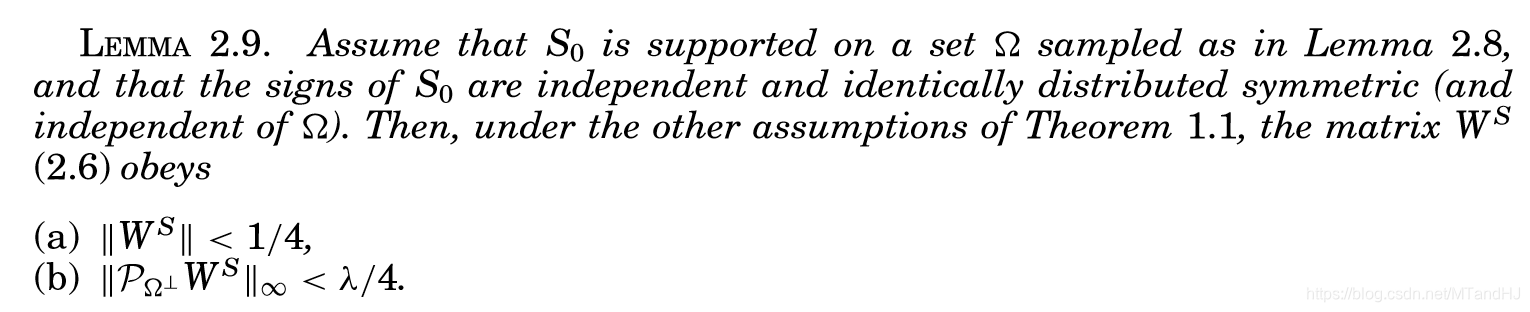
通过引理2.8和2.9,再利用范数的三角不等式,容易验证(W = W^L+W^S)满足对偶条件。
最后提一下,定理的概率体现在哪里,在对偶条件的引理中,有这么一个假设(|mathcal{P}_{Omega}mathcal{P}_T| le 1)和(|mathcal{P}_{Omega}mathcal{P}_T| le 1/2),这些条件并不一定成立,根据(Omega)的采样,成立的大概率的。
数值实验
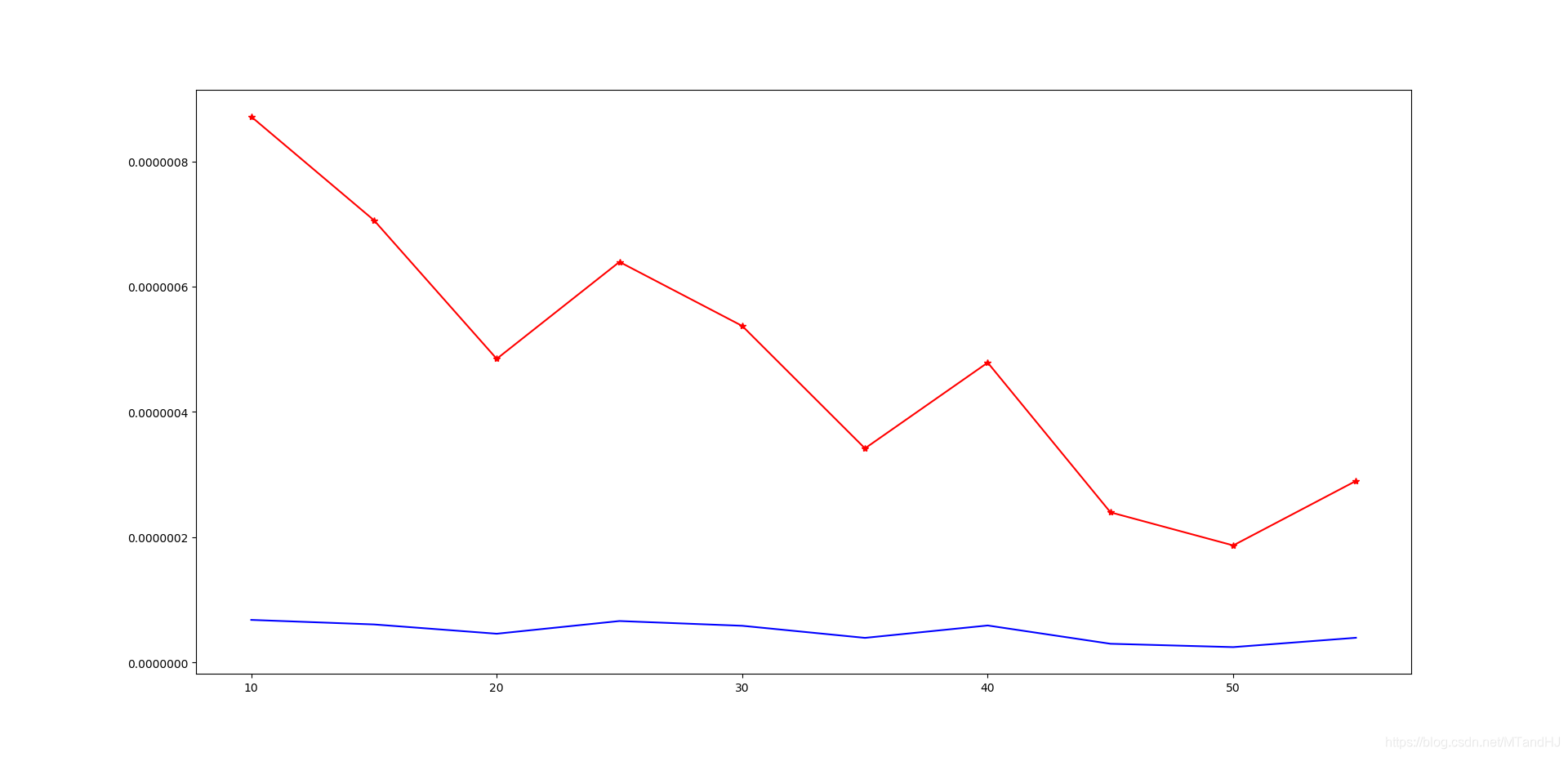
按照论文里,普通的人工生成矩阵,实验下来和论文的无异。也的确,(S_0)的规模大小(每个元素的大小)对能否恢复几乎没有影响,有影响的是(S_0)的稀疏度。实验下来,稀疏度越高(0基越小),恢复的越好,而且差距蛮大的。
我们的实验,(L = XY),其中(X,Y in mathbb{R}^{500 imes 25})依标准正态分布生成的,(S_0)是每个元素有(
ho)的概率为(100),(
ho)的概率为(-1),(1-2
ho)的概率为0。(
ho)我们选了(1/10, 1/15, ldots, 1/55)。
下面的图,红色表示(|hat{L}-L_0|_F/|L_0|_F),蓝色表示(|hat{S}-S_0|_F/|S_0|_F)。因为每种情况我只做了一次实验,所以结果有起伏,但是趋势是在的。
比较有意思的是图片的拆解,我在马路上拍了31张照片,按照论文的解释,通过将照片拉成向量,再混合成一个矩阵(M),然后通过优化问题解出(hat{L})和(hat{S}),那么(hat{L})的行向量(我做实验的时候是将一个照片作为一个行向量,论文里的是列向量)重新展成图片应该是类似背景的东西,而(hat{S})中对应的行向量应该是原先图片中会动的东西。
照片我进行了压缩((416 imes 233))和灰度处理,处理(M)用了1412次迭代,时间大概15分钟?比我预想的快多了。
我挑选其中比较混乱的图(就是车比较多的):
第一组:
M:

L:

S:

第二组:
M:

L:

S:

第三组:
M:

L:

S:

比较遗憾的是,(hat{S})中都出现了面包车,我以为面包车会没有的,结果还是出现了。
代码
"""
Robust Principal Component Analysis?
"""
import numpy as np
class RobustPCA:
def __init__(self, M, delta=1e-7):
self.__M = np.array(M, dtype=float)
self.__n1, self.__n2 = M.shape
self.S = np.zeros((self.__n1, self.__n2), dtype=float)
self.Y = np.zeros((self.__n1, self.__n2), dtype=float)
self.L = np.zeros((self.__n1, self.__n2), dtype=float)
self.mu = self.__n1 * self.__n2 / (4 * self.norm_l1)
self.lam = 1 / np.sqrt(max(self.__n1, self.__n2))
self.delta = delta
@property
def norm_l1(self):
"""返回M的l1范数"""
return np.sum(np.abs(self.__M))
@property
def stoprule(self):
"""停止准则"""
A = (self.__M - self.L - self.S) ** 2
sum_A = np.sqrt(np.sum(A))
bound = np.sqrt(np.sum(self.__M ** 2))
if sum_A <= self.delta * bound:
return True
else:
return False
def squeeze(self, A, c):
"""压缩"""
if c <= 0:
return A
B1 = np.where(np.abs(A) < c)
B2 = np.where(A >= c)
B3 = np.where(A <= -c)
A[B1] = [0.] * len(B1[0])
A[B2] = A[B2] - c
A[B3] = A[B3] + c
return A
def newsvd(self, A):
def sqrt(l):
newl = []
for i in range(len(l)):
if l[i] > 0:
newl.append(np.sqrt(l[i]))
else:
break
return np.array(newl)
m, n = A.shape
if m < n:
C = A @ A.T
l, u = np.linalg.eig(C)
s = sqrt(l)
length = len(s)
u = u[:, :length]
D_inverse = np.diag(1 / s)
vh = D_inverse @ u.T @ A
return u, s, vh
else:
C = A.T @ A
l, v = np.linalg.eig(C)
s = sqrt(l)
length = len(s)
v = v[:, :length]
D_inverse = np.diag(1 / s)
u = A @ v @ D_inverse
return u, s, v.T
def update_L(self):
"""更新L"""
A = self.__M - self.S + self.Y / self.mu
u, s, vh = np.linalg.svd(A) #or self.newsvd(A)
s = self.squeeze(s, 1 / self.mu)
s = s[np.where(s > 0)]
length = len(s)
if length is 0:
self.L = np.zeros((self.__n1, self.__n2), dtype=float)
elif length is 1:
self.L = np.outer(u[:, 0] * s[0], vh[0])
else:
self.L = u[:, :length] * s @ vh[:length]
def update_S(self):
"""更新S"""
A = self.__M - self.L + self.Y / self.mu
self.S = self.squeeze(A, self.lam / self.mu)
def update_Y(self):
"""更新Y"""
A = self.__M - self.L - self.S
self.Y = self.Y + self.mu * A
def process(self):
count = 0
while not (self.stoprule):
count += 1
assert count < 10000, "something wrong..."
self.update_L()
self.update_S()
self.update_Y()
print(count)
注意到,我自己写了一个newsvd的方法,这是因为,在处理图片的时候,用numpy的np.linalg.svd会报memoryerror,所以就自己简单调整了一下。