@article{hennig2012entropy,
title={Entropy search for information-efficient global optimization},
author={Hennig, Philipp and Schuler, Christian J},
journal={Journal of Machine Learning Research},
volume={13},
number={1},
pages={1809--1837},
year={2012}}
概
贝叶斯优化中的 Entropy Search (EI) 方法.
主要内容
这篇文章关注的是
的问题, 且假设定义域(I)是有界的.
一般, 通过高斯过程定义(f(x))的概率替代函数, 假设
在已经观测到(X = {x_1, ldots, x_T})以及(Y = {y_1, ldots, y_T})的基础上, 我们可以求得(f(x^*))的后验分布为以
为均值和方差的正态分布.
我们的目的是在已有这些条件的基础上, 寻找下一个(或多个)评估点.
定义:
其中( heta(x) = 1, xge0, else : 0). (prod)的部分在针对连续型的定义域时需要特别的定义. 显然(1)表示(x)为最小值点的概率.
再定义损失函数(当然损失函数不选择KL散度也是可以的, 但这是EI的名字的由来):
当我们选择(b(x))为(I)上的均匀分布的时候, 当我们最小化(mathcal{L})的时候, (p_{min})会趋向Dirac分布(即某个点处的概率密度为无穷, 其余为0, 显然, 该点我们有足够的信心认为其是(f(x))的最小值点).
但是这样还不够, 我们进一步关心其期望损失(最小化):
通过最小化(3),我们可以获得接下来的评估点.
接下来的问题是如果去估计.
(p_{min})的估计
比较麻烦的是(prod)的部分, 策略是挑选(N)个点( ilde{x} = { ilde{x}_1, ldots, ilde{x}_N}). 一种是简单粗暴的网格的方式, 但是这种方式往往需要较大的(N), 另一种是给定一个测度(u), 根据已有的观察((X, Y)), 通过(u(X, Y))采样( ilde{x}). 一个好的(u)应该在使得令损失能够产生较大变化的区域多采样点, 针对本文的情况 应该在(p_{min})值比较高的地方多采样点.
文中给了俩种方法, 一种直接的方法是(p_{min})可以用蒙特卡洛积分去逼近,
一下是我猜想的用MC积分的方式(文中未给出具体的形式)"
- 根据一定策略选取( ilde{x});
- 重复J次:
- 根据概率(p(f))采样(f( ilde{x}), f(x)),
- 计算(prod)部分
- 取平均
作者选择的是 Expectation Propagation (EP)的方法, 这种方法能够估计出( ilde{x}_i, i=1,ldots,N)处的概率(q_{min}( ilde{x_i})): (f_{min})存在于以( ilde{x}_i)为"中心"的一定范围内(文中用step)的概率. 当(N)足够的的时候, 这个step正比于((Nu( ilde{x}_i))^{-1}), 则:
这样我们就完成了(p_{min})的估计, 一个更加好的性质是(q_{min})关于(mu, sigma_*)的导数是有解析表达式的, 且(Z_u)是不必计算的(后续最小化过程中可以省略掉).
(mathcal{L}_{KL})的估计
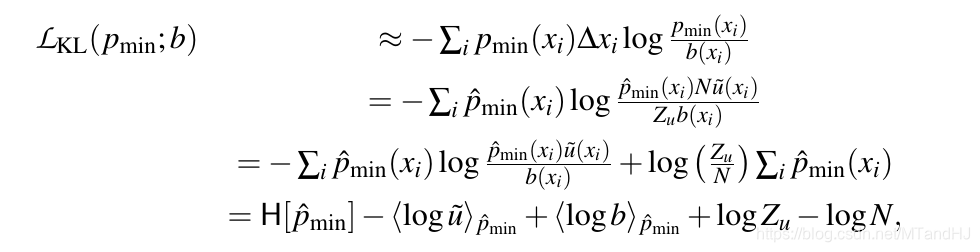
其中(hat{p}_{min}=q_{min}).
(langle Delta mathcal{L} angle)

(arg min_X langle mathcal{L}
angle_X) 用最小化一阶近似替代, 积分可以用MC积分逼近.
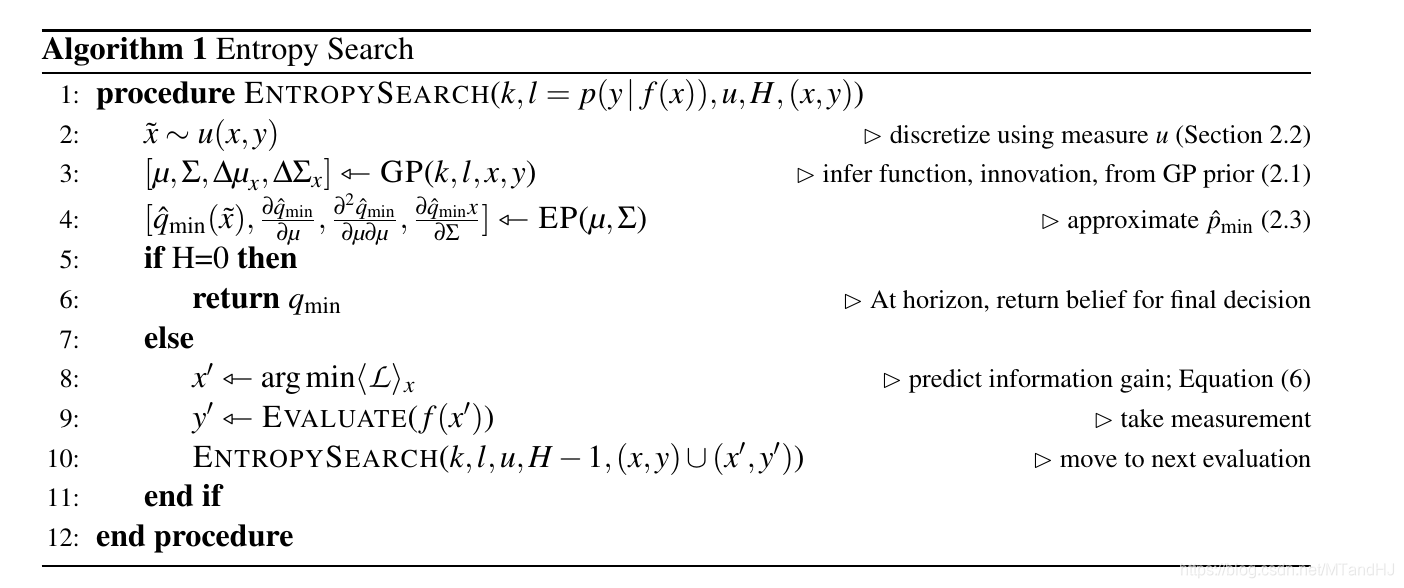
最后给出算法: