
高性价比的线控改装乘用车解决方案可以促进自动驾驶的发展和落地,降低自动驾驶初创,研究机构,高校等的进入门槛,这是PIX一直在追求的。
PIX改装过的线控乘用车已有近十款,包括MKZ,蒙迪欧,EU400,思域等,其中性能最佳,价格最合适的即为CRV,带有APA自动泊车,ACC自适应巡航以及混动的版本。线控性能与Autonomous stuff所改装的MKZ对标,而价格远低于其方案。
线控改装的乘用车是自动驾驶产业最理想的测试开发平台,因为乘用车具备通过车规级认证的零部件和性能,同时可以上路收集数据,因此全球的自动驾驶公司或研究机构都在使用线控乘用车进行开发,验证自动驾驶算法,传感器性能,安全度等等。也已经有成熟的服务商如Dataspeed和Autonomous stuff,提供了稳定强大但价格较高的方案。
线控乘用车为用户提供了数据采集接口和控制接口。所有的数据都是通过标准CAN总线进行传输,具有可靠性高、拓展性强的优点。通过CAN总线获取车辆的状态信息并传送至用户端,保证了数据的准确性和实时性。
对于线控改装,最核心的指标有两点:
第一是控制精度,比如转向精度,制动精度。
第二点是对于原车是否有硬件上的改动,任何硬件上的改动都会带来不稳定和不安全,选择“无损”的改装方案是最优的。
通过CAN命令和相应的车辆内置功能单元来实现对车辆的无损控制改造。实现了对转向、档位、油门、制动、灯光部分的控制。具有控制精度高、稳定、实时性强的优点。
为了更具体的呈现改装的效果,我们将本田CRV的全面线控数据性能制作成图表来呈现。

以下是改装线控CRV的实测数据
1. 线控转向阶跃响应测试


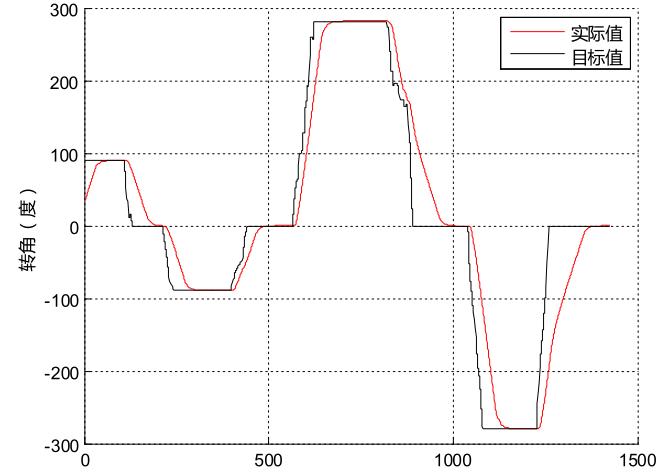
2. 线控转向动态跟踪测试
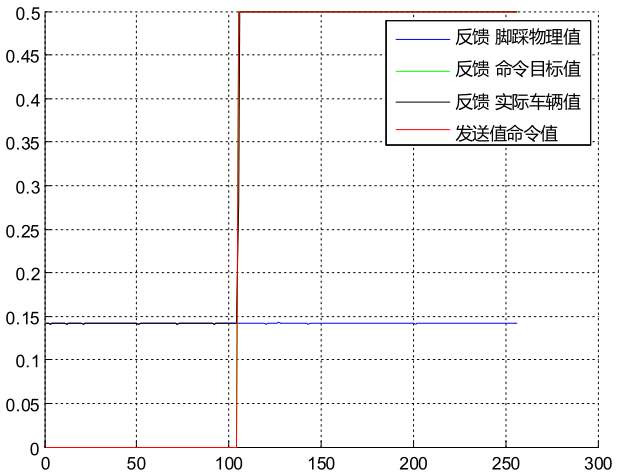
3. 线控油门阶跃响应

4. 线控刹车阶跃响应
这些数据与AS的线控MKZ对比,各项线控性能指标无明显差异,在转向控制方面,MKZ转向平滑度更优,CRV响应速度更快。在制动控制方面,CRV和MKZ的底层控制逻辑不同,CRV具备的动能回收和机械制动力互补的控制方式,使制动更加平顺稳定。
实际效果展示:
1.CRV转向控制

2.CRV制动控制

3.CRV转向灯控制

我们希望可以通过提供这项高性价比的服务来推动自动驾驶产业的发展,这是一个令人激动的产业,将大大的促进城市文明的发展甚至变革,改善生活。
我们已经骄傲的为多个自动驾驶初创公司客户提供了CRV的线控改装套件或整车改装服务,并通过积累的线控技术,打造了自动驾驶通用底盘。同时建立线上的自动驾驶开发者社区,组织更多的自动驾驶黑客马拉松,使这个生态的玩家更加丰富多元,降低他们的进入门槛,去中心化的进化生长。
在通往可持续发展城市的道路上,PIX MOVING专注打造无人驾驶移动空间,重塑城市的未来。与大多数产品不同,我们从城市、交通以及车队运维的角度出发,对产品进行定义和开发,自主移动底盘运载模块化舱体,底盘舱体可自动分离,车队可大大节省成本。PIX目标以自动驾驶产业地产项目和零售配送空间项目为率先实现规模化商业化的应用场景。PIX在车辆设计、制造方面持续创新,通过基于算法的生成设计,结合自主研发的3CM(Cognitive · Configurable · Collaborative Manufacture )增材制造系统,,减少车辆70%零部件数量和装配工作。目前PIX打印出全球首个金属一体化底盘,并实现区域内L4自动驾驶能力。公司获得硅谷SOSV等机构天使轮融资。目前产品已获美国零售配送客户,2019年下半年投入商业运行。项目入选英伟达AI初创加速计划,Autodesk旧金山创新中心驻地项目,在米其林movin'on challenge获胜,拥有20余项核心知识产权及专利。