(2)平行投影
【太阳光线产生的投影为平行投影】
如果把透视【投影的中心】移至【无穷远处】,则各【投影线】成为【相互平行】的直线,这种投影法称为平行投影。
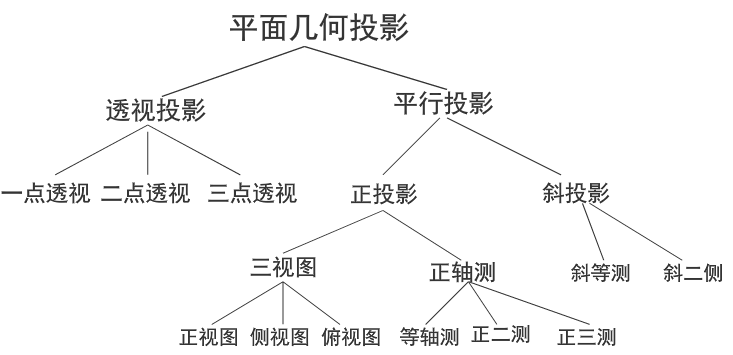
平行投影可以根据投影方向与投影面的夹角分成两类:正投影和斜投影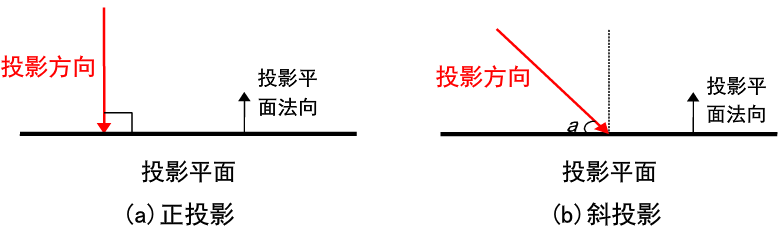
1>正投影
根据投影面与坐标轴的【夹角】又可分为:三视图和正轴侧图
当投影面与某一坐标轴【垂直】时,得到的投影为三视图,投影方向和这个坐标轴的方向一致;否则得到的投影为正轴侧图。
『1』.三视图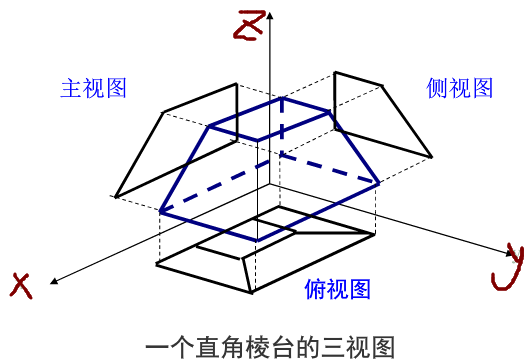
1.主视图——>XOZ面(也称为V面)为投影面
由投影变换前后三维物体上点到主视图点的关系,变换矩阵为: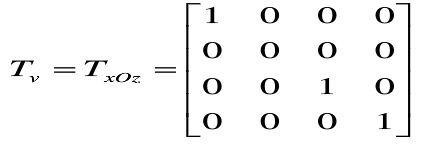
由三维物体到主视图的投影变换矩阵表示为:
[x' y' z' 1]=[x y z 1]•Tv=[x 0 z 1]
2.侧视图——>YOZ面(也称为W面)为投影面
由投影变换前后三维物体上点到侧视图点的关系,变换矩阵为: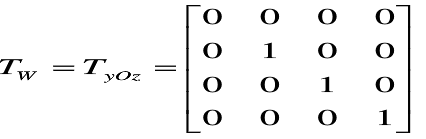
为使侧视图与主视图都画在一个平面内,就要使W面绕Z轴正转90°,即应有一个旋转变换,其变换矩阵为: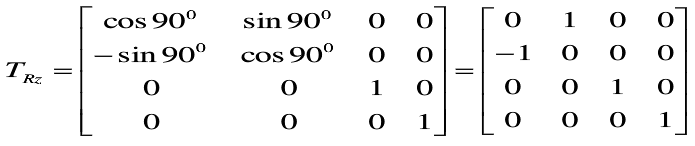
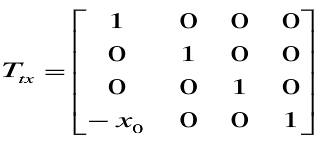
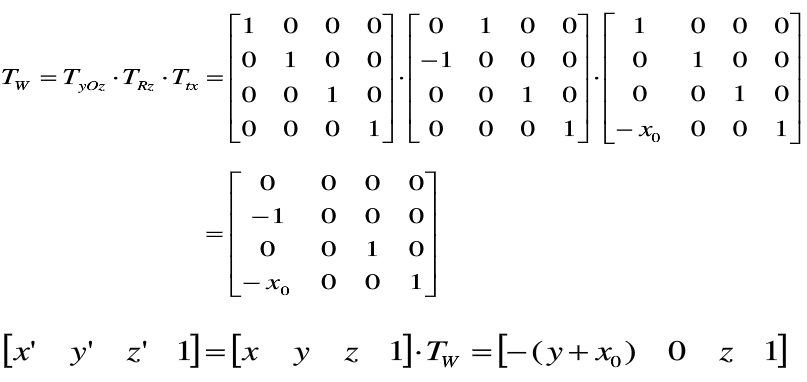
为使主视图和侧视图有一定的间距,还要使W面沿负X方向平移一段距离-Xo,其变换矩阵为:
——>俯视图的投影变换矩阵为:
3.俯视图——>XOY面(也称为H面)为投影面
由投影变换前后三维物体上点到俯视图点的关系,变换矩阵为: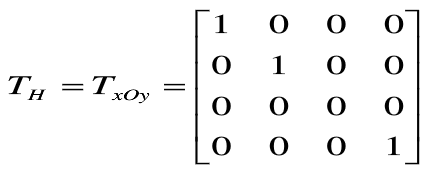
由三维物体到主视图的投影变换矩阵表示为:
[x' y' z' 1]=[x y z 1]•Th=[x y 0 1]
为使俯视图与主视图都画在一个平面内,就要使H面绕X轴顺时针转90°,即应有一个旋转变换,其变换矩阵为: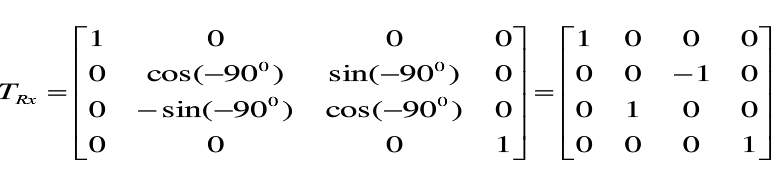
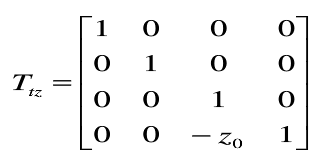
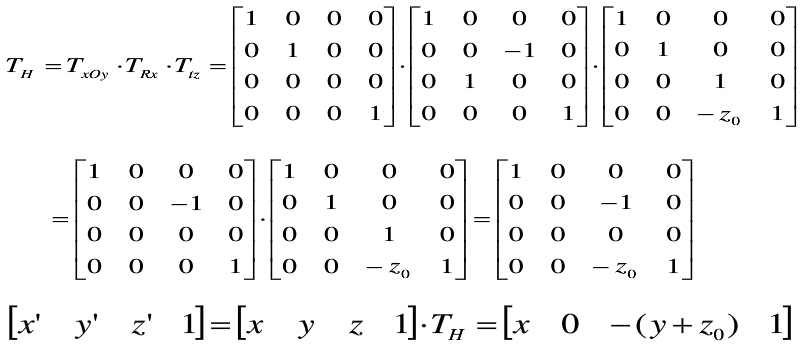
为使主视图和俯视图有一定的间距,还要使H面沿Z方向平移一段距离-Zo,其变换矩阵为:
——>俯视图的投影变换矩阵为:
【三视图的计算】
a.确定三维物体上【各点】的位置坐标;
b.引入齐次坐标,求出所做变换相应的【变换矩阵】;
c.将所作变换用矩阵表示,通过【运算】求得三维物体上各点经变换后的点的坐标值;
d.由变换后得到的二维点【绘出】三维物体投影后的三视图。
【特点】
物体的一个坐标面平行于投影面,其投影能反映形体的实际尺寸。
【不足之处】
一种三视图上只有物体一个面的投影,所以三视图难以形象地表示出形体的三维性质,只有将主、侧、俯三个视图放在一起,才能综合出物体的空间形状。
『2』.正轴测图
当投影面与【三个坐标轴】之间的夹角都【相等】时为等轴测
当投影面与【两个坐标轴】之间的夹角都【相等】时为正二测
当投影面与【三个坐标轴】之间的夹角都【不相等】时为正三测
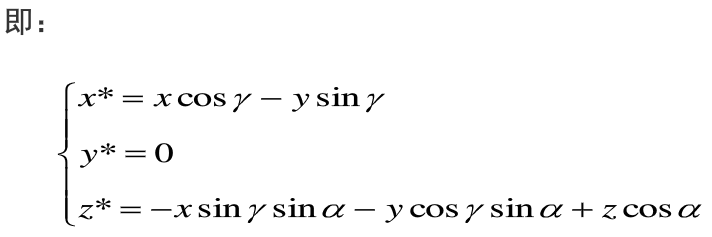
空间物体的正轴测图是以V面(XOZ面)为轴测投影面,先将物体绕Z轴转Y角,
接着绕X轴转-α角,最后向V面投影,变换矩阵为:T正=Tz•Tx•Tv
【三视图与轴测图比较】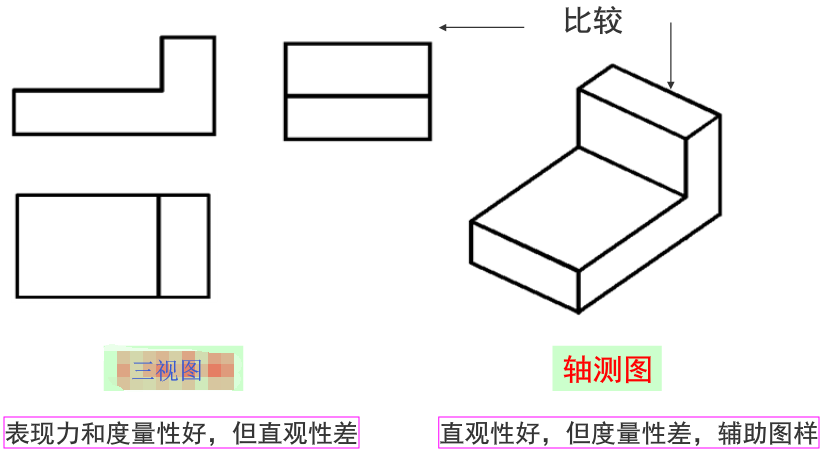
2>斜投影
【平行投影特点】
平行投影保持物体的【有关比例不变】;
物体的各个面的【精确视图】由平行投影而得;
没有给出三维物体外表的真实性表示。
【轴测投影图】是用【平行投影法】形成的,【视点在无穷远处】。
【三维图形变换小结】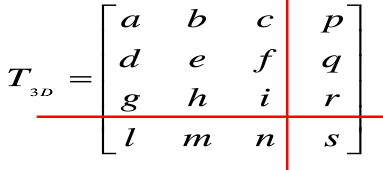
根据T3D在变换中所起的具体作用,进一步可将T3D分成四个矩阵,即:


平面几何投影的分类: