1、移动机器人底盘
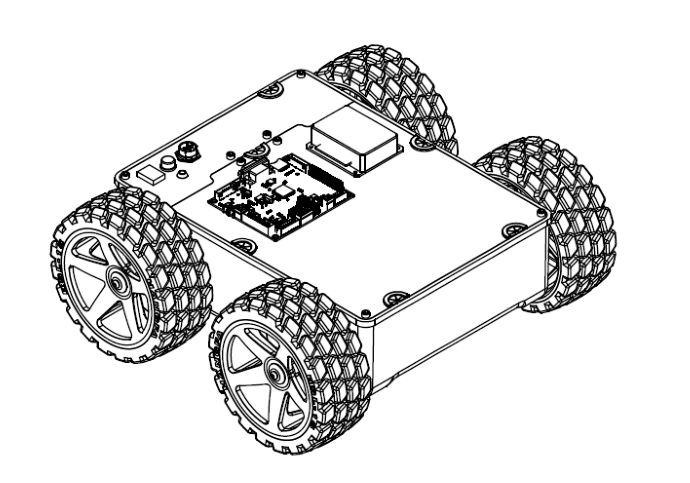
移动底盘有多大
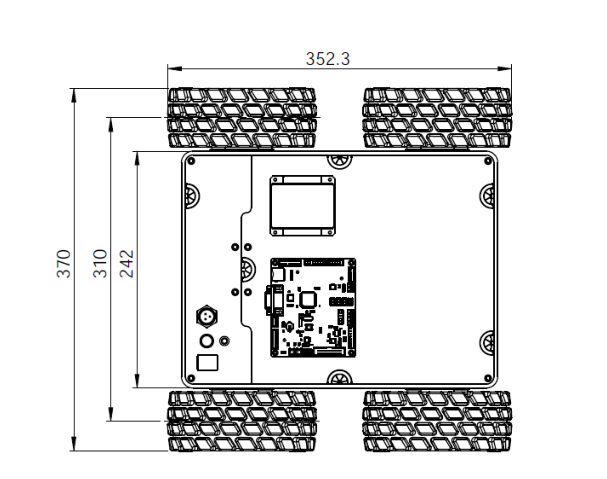
长宽高:35*35*40cm
移动底盘有多重
17kg
底盘最大载重是多少
40kg
底盘最大速度是多少
1.2m/s
底盘的电池是多大
24V/7.8A 锂离子电池
底盘能够续航多久
8小时(负载5kg,运行速度1m/s)
底盘是由哪些部分组成
驱动电机 控制板 编码器 锂电池 分线盘 轮子
底盘是如何进行二次开发的
通过RS232总线或CAN总线可以和运动控制板连接
2、STM32F429IGT6
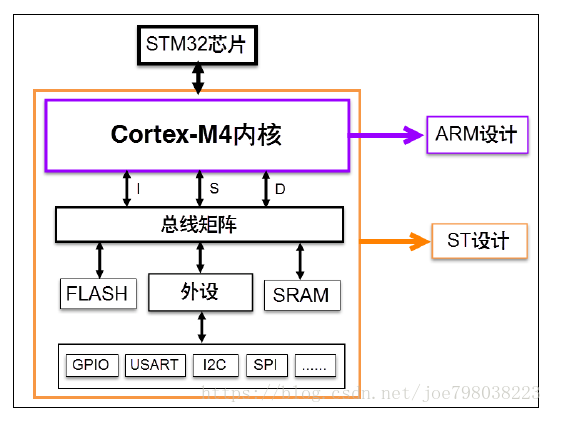
芯片内核 ARM Cortex-M4内核
有多少个管脚
176个管脚
芯片内置存储空间
1M FLASH 256KB SRAM(静态随机存储器)
外扩的存储空间
SDRAM:32MB
NAND FLASH:512MB
SPI FLASH:32M
EEPROM:256K
系统频率有多快
180Mhz
有哪些外设资源
串口
IIC
SPI
CAN
定时器中断
外部中断
网口
处理器是什么内核
Cortex M4 内核
运行的是单任务程序,没有跑操作系统
有一个LCD彩屏
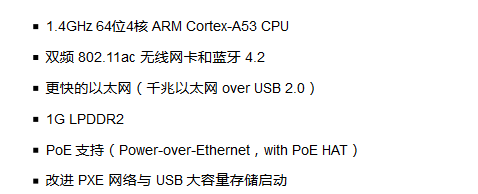
3、树莓派3b+
参考网址:http://shumeipai.nxez.com/2018/03/14/raspberry-pi-3-model-bplus-sale-now.html
http://m.elecfans.com/article/620717.html
外设:
4个USB口,可接鼠标、键盘、U盘
1个以太网口
内置wifi模块
支持蓝牙
1个HDMI高清视频输出接口
1个音频输出口
1G的内存
microSD卡作为树莓派的硬盘
运行环境
操作系统为Linux
版本号为:ubuntu 16.04
处理器是什么型号
BCM2837
处理器有多少个管脚
引出了40个GPIO口
其中包括串口的RX和TX引脚,通过这两个串口引脚可以与STM32进行连接
处理器的系统频率有多快
1.4GHz
处理器是什么内核
64位 4核 ARM Cortex-A53 内核
处理器有哪些外设资源
12个16位定时器
2个32位定时器
2个DMA控制器
6个SPI
2个全双工I2S
1个SAI
3个IIC
8个串口
2个USB
2个CAN
3个12位的ADC
2个12位的DAC
1个RTC
1个SDIO
1个FMC
1个TFTLCD控制器
1个10/100M以太网
1个摄像头接口
140个通用IO口
IIC
uart
外部扩展接口
网口
2个microUSB接口
1个USB接口
RS232接口(一公一母)
RS485接口
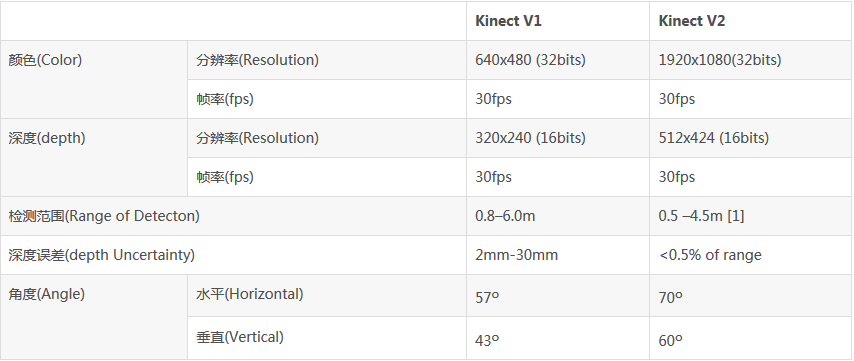
4、Kinect摄像头
参考
https://blog.csdn.net/u012062327/article/details/51444158
该摄像头是第几代
微软第一代摄像头
外观

摄像头的结构组成
摄像头由一个彩色摄像头(中间)和一个深度传感器组成
深度传感器主要由一个红外线投射器(左边)和光斑接收器组成(右边),将返回的光斑与参考光斑进行对比,利用三角测量原理计算物体的三位空间信息。
如何对这个摄像头进行开发
可以在Windows环境下,
用C++语言,VS编译器
开发环境是什么样的
Windows 或 Linux ROS
编程语言是什么
C++
IDE是什么
通过这个摄像头能够获得哪些信息
深度信息 RGB彩色信息
其他的一些信息
5、激光雷达
使用这款激光雷达的参考网址:https://blog.csdn.net/WisdomXLH/article/details/80547669
参考网址:https://blog.csdn.net/weixin_44046400/article/details/85174704

这款激光雷达的参数
最小检测距离为0.15米,最远检测距离为12米
扫描角度为0-360°
扫描频率为5-15hz 也就是每秒能转5支15圈
角度分辨率 0.45° -1.35° 典型值为0.9° 也就是每圈能采集800个点,如果频率为10hz的话,每秒钟能采集8000个点。
通过这个激光雷达能获得哪些信息
如何对这个激光雷达进行开发
开发环境是什么样的
编程语言是什么
IDE是什么
6、GPS模块
GPS模块的型号是什么
GPS的精度是多大
10米
GPS如何与开发板进行连接
通过串口连接
GPS模块能获得哪些信息
经纬度 海拔 时间 加速度 连接的卫星数
7、IMU模块
IMU模块的型号是什么
MPU9250
IMU模块能获得哪些信息
加速度
角度
方位
IMU的精度是多大
IMU模块如何与开发板连接
通过IIC总线与控制板连接
8、GPRS模块
GPRS模块的型号是什么
该模块通过什么协议传输数据
TCP UDP
该模块如何与开发板连接
通过串口连接