Localization (using Histogram Filters)
定位指的是在传感器和移动之间来回的迭代,使得能够保持跟踪目标对象的位置、方向和速度。
这篇将写一个程序来实施定位,与GPS相比,这个的程序将极大的降低误差范围。
假设一个汽车或者机器人所处在一个一维世界,它在没有得到任何提示在哪一位置。通过一个函数对这个问题建模,纵轴表概率,横轴表这个一维世界里所有位置,利用一个当值函数给这个一维世界每一个地方分配相同权重。

为了定位必须引入其他特征,假设有三个看起来相似的门,可以从非门区域 区分一扇门,(brlief = 信度),机器人感受到了它在一扇门的旁边,它分配这些地点更大的概率。门的度量改变了信度函数,得到新函数像这样,三个临近门的位置信度递加,其他所有地方信度递减,posterior bilief 表示它是在机器人进行感测测量后定义的。
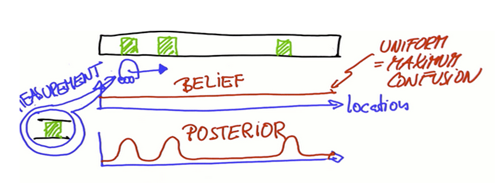
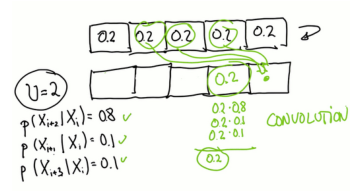
如果机器人移动了,那么凸起的信度也会随之移动(所在位置的概率),而且凸起会因为机器人只是粗略地知道移动了多远而变得扁平化,这个过程叫卷积,卷积就是两个函数或措施的重叠,具体的说是一个函数划过另一个函数的重叠占比,介于0~1之间(CONVOLUTION 卷积)

假设汽车或机器人发现它的右边再一次靠近一扇门,此时在先于第二次测量的信度上乘以一个函数,函数如下,它在每一扇门下都有一个很小的凸起,但却有一个非常大的凸起。在先验上这是唯一一个真的很符合这个门的位置,所以其他的门有一个很低的信度,Posterior belief 先验信度

重要的是仍然不能确定我们的位置,但是之后,会比一次或零次测量之后的测量更确定。 你认为在做了越来越多的测量后会发生什么?
这种定位称为Monte Carlo 定位,也称为直方图滤镜。
用Python程序化
sense( )
新建一个列表,在这个一维世界中,假设有5个不同的单元或者说地方,用X1~X5标识,机器人落在每个单元的概率相同,概率的和加起来是1,P(Xi)表示落在其中任何一个单元格的概率。
1 #初始化向量 2 P = [0.2,0.2,0.2,0.2,0.2] 3 #创造一个长度为n的向量,可以通过变化n的值得到n个元素的向量 4 P =[ ] 5 n = ? 6 7 for i in range(n) 8 p.append(1./n) 9 print p
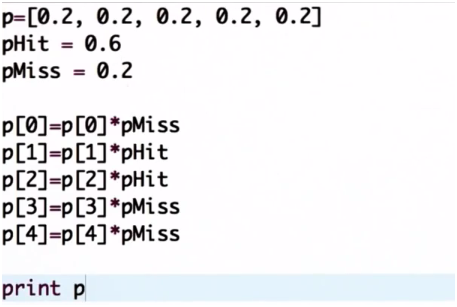
有着5个单元格的一维世界的度量方式,假设有两个被染成红色,其他两个是绿色,分配给每一个单元的概率是0.2,现在机器人允许被感知,它先看到胡是红色,23的概率会上升,145的概率会下降,用乘法将这个度量合并到信度里。
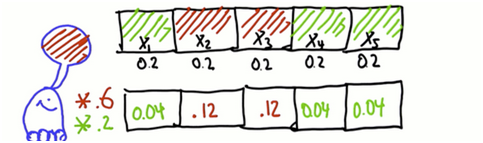
可是这并不是一个有效的概率分布,因为概率加起来总要等于1。这些概率值的求和是0.36,为了变成有效的概率分布,把每个数除以0.36
通过引入一个变量使代码更加优雅,这个变量为每个小格指定红色或者绿色。
此外,先前说道机器人感觉到它在一个红色的区间里,所以这里定义测量到的值为红色。
然后,写一个叫sense的函数用在后面的定位器,它能对探测数据进行更新,输入初始分布p、探测值Z以及其他所有的全局变量,输出一个标准化分布q,q反应了输入概率的非标准化乘积
P = [0.2,0.2,0.2,0.2,0.2] world = ['green','red','red','green','green']
#定义测量值为红色
Z = 'red'
pHit = 0.6 pMiss = 0. 2 def sense() q = [ ] for i in range(len(p)): #用了一个二元标记,hit =0或1 hit = (Z == world[i]) #由于hit取0或1,所以每次只有一个算式成立
q.append[p[i]*(hit*pHit+(1-hit)*pMiss)] #以下代码使输出标准化(和等于1)
s = sum(q) for i in range(len(p)): q[i] = q[i] / s return q
print sense(p,z)
修改代码,通过用包含多个测量值的测量值向量替代Z
假设机器人感觉到红色,之后是绿色,修改代码使得更新两次概率,并在两次测量结合后给出后验分布,以便可以处理任何测量顺序,无论长度如何。
p = [0.2, 0.2, 0.2, 0.2, 0.2] world = ['green', 'red', 'red', 'green', 'green'] #替代Z measurements = ['red', 'green'] pHit = 0.6 pMiss = 0.2 def sense(p, Z): q = [ ] for i in range(len(p)): hit = (Z == world[i]) q.append(p[i] * (hit * pHit + (1hit) * pMiss)) s = sum(q) for i in range (len(p)): q[i] = q[i]/s return q #抓取测试值向量中元素用来更新自己的概率
for k in range(len(measurements)): p = sense(p, measurements [k]) print p
这个sense()就是定位中的关键函数——测量更新函数,对每个测量值调用一次这个函数并且更新概率分布
move( )
假设世界是循环的,空间的概率分布如下,并且知道机器人向右移动,若机器人向右移动一个位置,运动后的后验概率分布是多少?

定义move函数,输入初始分布p和运动量U,其中U是向右或向左移动的网格的数量,返回新分布q,如果U=0,q=p
将网格2的概率从0变为1,使得向右移动一格后,以观察到运动的效果
def move(p,U) q = [] for i in range(len(p)) q.append(p[(i - U) % len(p)]) #a very skilled code renturn q
for k in range(len(measurements)):
p = sense(p, measurements [k])
print move (p, 1)
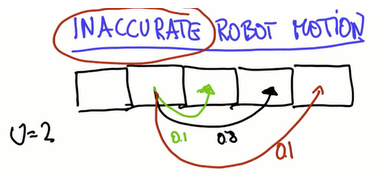
机器人移动不是准确的,定位困难
需要建立更精确的机器人运动模型,假设机器人移动到目标地的概率是0.8,到目标地之前概率是0.1,超过目标概率是0.1。
已有初始分布,给出移动后的分布
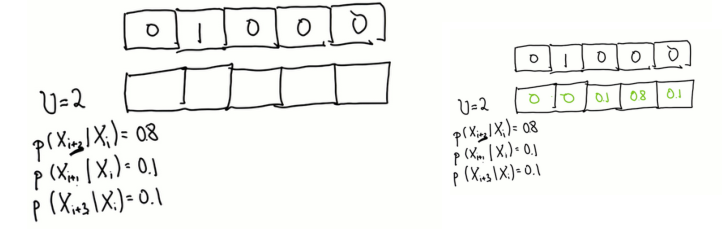
如预期,概率分布已经转移和扩展。 移动导致信息丢失。
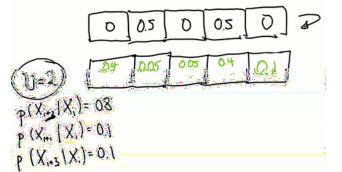
又一次,假设网格2和4的值为0.5,填充后验分布(也考虑了未达到和超过两种情况)。
再一次,给定均匀分布,填写移动后分布。
明确计算到达每格可能方式太复杂,换种思路,如果从统一的先前分配(最大混淆状态)开始,之后移动,必定最终得到均匀分布
p = [0, 1, 0, 0, 0) world = ['green', 'red', 'red', 'green', 'green'] measurements = ['red', 'green'] pHit = 0.6 pMiss = 0.2 #Add exact probability pExact = 0.8 #Add overshoot/undershoot probability pOvershoot = 0.1 pUndershoot = 0.1 def move(p, U): #Introduce auxiliary variable s q= [] for i in range(len(p)): s = pExact * p[(iU) % len(p)] s = s + pOvershoot * p[(i-U-1) % len(p)] s = s + pUndershoot * p[(i-U+1) % len(p)] q.append(s) return q
该函数适应了预期的低估或超调的可能性,通过遍历p中的每个网格并且在q中的三个单元上(目标网格,距离U以及过冲和下冲网格)适当地分配其概率来移动目的地。
从初始分布p = [0, 1, 0, 0, 0]开始,移动两次:
p = move(p, 1) p = move(p, 1) print p >>>[0.01, 0.01, 0.16, 0.66, 0.16]
结果是一个向量,其中0.66是最大值,而不是0.8。 这是预期的:两次移动已经平坦化,扩大了分布。
而后编写移动一千步后得到的概率分布:
for k in range(1000): p = move(p, 1) print p #最终分布是如预期的每个网格0.2
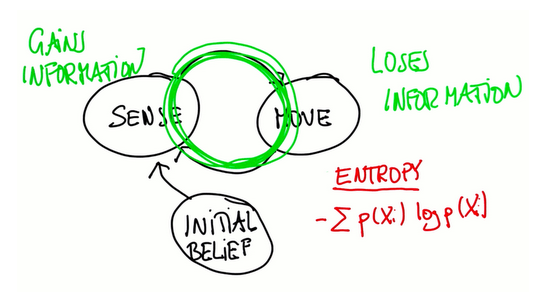
机器人感知和移动
定位,特别是这里用到的Monte Carlo定位方法,只不过是传感器和移动的迭代,有一个初始的感知抛给循环。每次移动都会丢失信息(因为机器人的移动是不准确的),每次感知会获取信息,事实证明机器人移动之后概率会变得平展、延伸,感知之后会变得更加集中。 熵是衡量分布信息的度量。
机器人从均匀的的先前分部开始,再向右移动两次,首先感觉到是红色,然后感觉到是绿色, 计算后验分布
motions = [1, 1] p = [0.2, 0.2, 0.2, 0.2, 0.2] for k in range(len(measurements)): p = sense(p, measurements[k]) p = move(p, motions[k]) print p
查看结果概率分布,机器人最可能是从网格3出发
如果机器人感知到两次红色
1 p=[0.2, 0.2, 0.2, 0.2, 0.2] 2 world=['green', 'red', 'red', 'green', 'green'] 3 measurements = ['red', 'green'] 4 motions = [1,1] 5 pHit = 0.6 6 pMiss = 0.2 7 pExact = 0.8 8 pOvershoot = 0.1 9 pUndershoot = 0.1 10 11 def sense(p, Z): 12 q=[] 13 for i in range(len(p)): 14 hit = (Z == world[i]) 15 q.append(p[i] * (hit * pHit + (1-hit) * pMiss)) 16 s = sum(q) 17 for i in range(len(q)): 18 q[i] = q[i] / s 19 return q 20 21 def move(p, U): 22 q = [] 23 for i in range(len(p)): 24 s = pExact * p[(i-U) % len(p)] 25 s = s + pOvershoot * p[(i-U-1) % len(p)] 26 s = s + pUndershoot * p[(i-U+1) % len(p)] 27 q.append(s) 28 return q 29 30 for k in range(len(measurements)): 31 p = sense(p, measurements[k]) 32 p = move(p, motions[k]) 33 34 print p

结果表明机器人在网格4的概率大,也就是从网格2出发
这个代码就是Google自动驾驶定位代码的本质,也是精髓,特别重要的是,汽车准确知道它在哪里,对于它行驶的道路地图而言,虽然道路不能被涂成绿色或红色,但是道路有着路标代替红色绿色的格子,不仅是每一步一次的观察,而是整个场地的观察,整个照相机图片的观察,可以对照片做同样的事,只要能够将照片嵌入到模型当中,用在度量当中,也不会比这个代码难上多少代码,而Google花费这么多时间构建自动驾驶产品因为现实情况会很复杂,道路会正在铺设和重修,这些问题要处理。
定位总结
定位涉及机器人不断更新其对所有可能位置的感知。 在数学上说,可以说机器人不断更新其在样本空间上的概率分布。 对于一辆真正的自驾车,这意味着道路上的所有位置都有一个概率。
如果AI正常工作,这种概率分布应该有两个特征:
- 应该有一个尖峰。 这表明汽车对其当前位置有非常明确的感知。
- 峰值应该是正确的。
Monte Carlo定位程序可以写成一系列步骤:
- 从当前位置的感知开始
- 通过感知测量结果乘以这个分布
- 归一化所得到的分布
- 通过执行卷积移动。 这听起来比真的更复杂:这个步骤实则涉及乘法和加法,以获得每个新的概率位置。
两个数学方法
贝叶斯法则
在概率上,经常想在更新概率分布后测量。 有时这不容易直接做。
贝叶斯法则是进行测量后更新概率分布的工具。x是网格,Z是感知度量,贝叶斯法则方程式如下:
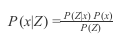
左边应该被读成“观察Z后的X的概率”,P(x)是先验分布,然后与P(Z|x)测量概率相乘,对于每个格子,可以放上下标i,P(Z)是每个格子如此操作后的和
 一个用贝叶斯做癌症测试例子
一个用贝叶斯做癌症测试例子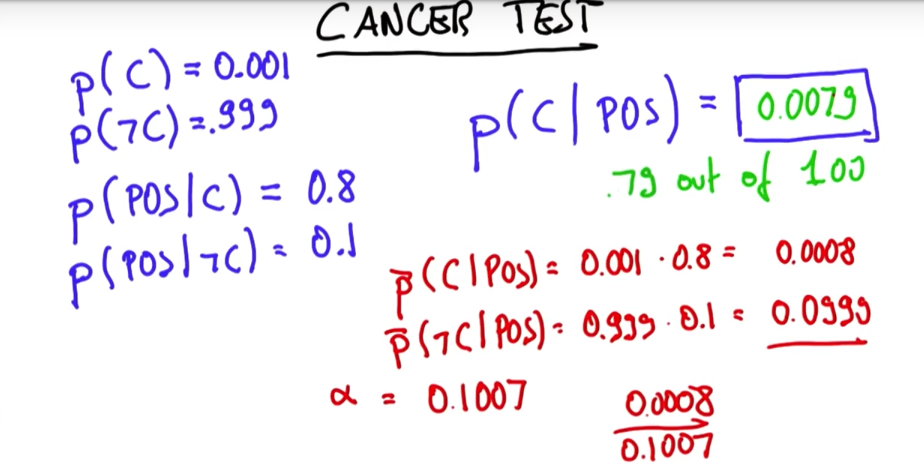
全概率定理
上面是测量,再看移动,在这里要关注一个网格“xi”,并且询问机器人运动后在xi中的概率是什么。 现在,使用时间索引来表示运动前后:


P(Xi | Xj)是可从j到i的所有路径概率,利用这个定理在移动前就能算出概率分布
举个例子,抛一枚硬币,反面什么也不做。正面再抛一次,求第二次抛出正面概率

编写一个程序:
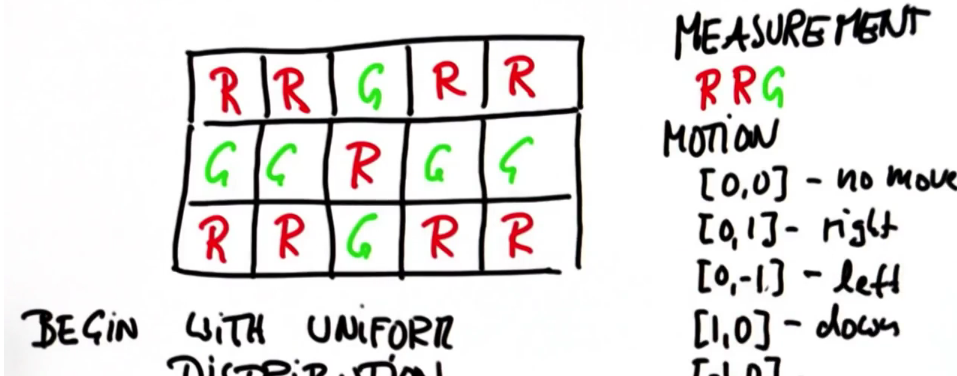
1 # 定位函数用到了以下参数: 2 # colors: 3 # 2D 列表, 'R' (红色网格l) or 'G' (绿色网格) 4 # measurements: 5 # 机器人得到的测量值列表 ,'R' or 'G' 6 # motions: 7 # 机器人采取的动作列表,[dy,dx],dx表示x方向的变化(正向右移动),dy表 # 示y方向的变化(正向下移动) 8 # 9 # sensor_right: 10 # 测量是正确的概率,浮动在0和1之间,不正确的概率是1-sensor_right 11 # p_move: 12 # 执行移动命令的概率,浮动在0和1之间,运动命令失败的概率(仍保持原地)是 13 # 1-p_move; 机器人在本编程中不会超过目的地; 14 # 15 # 输出:函数返回与颜色列表尺寸相同的2D概率分布列表,最初是均匀的概率分布 16 # 17 # 每一步先行动,再测量,且任何行列是循环的 18 19 def localize(colors,measurements,motions,sensor_right,p_move): 20 sensor_wrong = 1.0 - sensor_right 21 p_stay = 1.0 - p_move 22 23 if len(measurements) != len(motions) 24 raise ValueError,"error in size of measurement/motion vector" 25 26 pinit = 1.0 / float(len(colors)) / float(len(colors[0])) 27 p = [[pinit for row in range(len(colors[0]))] for col in range(len(colors))] 28 29 for k in range(len(measurements)): 30 p = move(p,measurements[k]) 31 p = sense(p,colors,measurements[k]) 32 33 show(p) 34 35 def sense(p,colors,measurement): 36 aux = [[0.0 for row in range(len(0)) for col in range (len(p))]] 37 s = 0.0 38 for i in range(len(p)): 39 for j in range(len(p[i])): 40 hit = (measurement == colors[i][j]) 41 aux = p[i][j]*(hit*sensor_right + (1-hit)*sensor_wrong) 42 s+=aux[i][j] 43 for i in range(len(aux)): 44 for j in range(len(p[i])): 45 aux[i][j] /= s 46 return aux 47 48 def move(p,motion): 49 aux = [[0.0 for row in range(len(0)) for col in range (len(p))]] 50 for i in range(len(p)): 51 for j in range(len(p[i])): 52 aux = (p_move*p[i-motion[0] % len(p)][j - motion[1] % len(p[i])] + (p_stay*p[i][j])) 53 return aux 54 55 def show(p): 56 rows = ['[' + ','.join(map(lambda x: '{0:.5f}'.format(x),r)) + ']' for r in p] 57 print '[' + ', '.join(rows) + ']' 58 def show(p) 59 for i in range(len(p)) 60 print p[i] 61 62 63 64 ############################################################# 65 # For the following test case, your output should be 66 # [[0.01105, 0.02464, 0.06799, 0.04472, 0.02465], 67 # [0.00715, 0.01017, 0.08696, 0.07988, 0.00935], 68 # [0.00739, 0.00894, 0.11272, 0.35350, 0.04065], 69 # [0.00910, 0.00715, 0.01434, 0.04313, 0.03642]] 70 # (within a tolerance of +/- 0.001 for each entry) 71 72 colors = [['R','G','G','R','R'], 73 ['R','R','G','R','R'], 74 ['R','R','G','G','R'], 75 ['R','R','R','R','R']] 76 measurements = ['G','G','G','G','G'] 77 motions = [[0,0],[0,1],[1,0],[1,0],[0,1]] 78 p = localize(colors,measurements,motions,sensor_right = 0.7, p_move = 0.8)
实际设计工作中怎样给这些概率赋值,例如pHit、pMiss等,从试验中获得还是传感器参数决定?
《概率机器人》--很大程度上由传感器决定,谷歌大量使用激光雷达作为传感器,但如果选择摄像机就需要用与测距仪不同的模型,使用激光雷达时测的是距离而非pHit、pMiss,它给出的是在特定位置测得特定距离的概率。
是否要求机器人内置地图?
yes,实时定位与地图创建SLAM
实际中的定位器是用来测什么的,显然不是一扇门?
汽车会内置地图,激光摄像头扫描周围场景,其中包含与内置地图相同的特征,要解决的概率匹配问题是将生成的附近地图叠加到全局地图上,检查能获得最佳匹配的位置。
全工况?
雨,调高亮度参数,雪,未解决