I 单片机复位概述
1.1 复位机理
引脚RST保持2个机器周期以上的高电平
1.2 电路原理
电容刚接入电路时相当于短路,电容处于充电状态;当电容两极板充满电量后,电容相当于断路状态。根据电容充电时间效应,通过改变电容值及接入电阻值的大小,从而满足一定时长的高电平输出。
1.3 复位方式

图1复位电路图
1.3.1 上电复位
上电瞬间,电容充电电流最大,电容相当于短路,RST端为高电平,自动复位;电容两端的电压达到电源电压时,电容充电电流为零,电容相当于开路,RST端为低电平,程序正常运行。
1.3.2 手动复位
首先经过上电复位,当按下按键时,RST直接与VCC相连,为高电平形成复位,同时电解电容被短路放电;按键松开时,VCC对电容充电,充电电流在电阻上,RST依然为高电平,仍然是复位,充电完成后,电容相当于开路,RST为低电平,正常工作。
II 系统分析
2.1 模型简化
如图2,模型可简化为图示电路,其中,系统参数为C1和R2,系统控制输出量为,以电源接入为初始状态,即,对模型进行建模分析。
设定单片机的晶振为12MHZ,则两个机器周期为2ms。
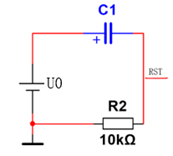
图2简化系统模型
2.2 模型假设
假设电路中的电阻阻值忽略不计;
假设电平变化为理想电平模式,即>1.5V为高电平,输出为1;<1.5V为低电平,输出为0。
2.3 微分方程

III 系统求解
3.1 微分方程求解
3.1.1 近似解
clear,clc
t0=0;
tN=0.5;%单位为s
h=0.001;
t=t0:h:tN;
N=length(t);
j=1;
y0=5;
for j=1:N
tn=t0+h;
k1=rk4(t0,y0);
k2=rk4(t0+h/2,y0+h*k1/2);
k3=rk4(t0+h/2,y0+h*k2/2);
k4=rk4(t0+h,y0+h*k3);
yn=y0+(h/6)*(k1+2*k2+2*k3+k4);
yy(j)=yn;
if yy(j)>=1.5
y(j)=1;
else
y(j)=0;
end
t0=tn;
y0=yn;
j=j+1;
end
t=0:h:tN;
figure(1)
plot(t,yy,'r')
title('figure of RK_4 method')
xlabel('Time (s)')
ylabel('Value (y)')
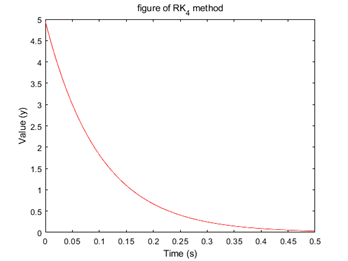
图3 近似解曲线图
figure(2)
plot(t,y,'b')
title('figure of Urst')
xlabel('Time (t)')
ylabel('Value (U)')
axis([0 0.5 -0.1 1.1])
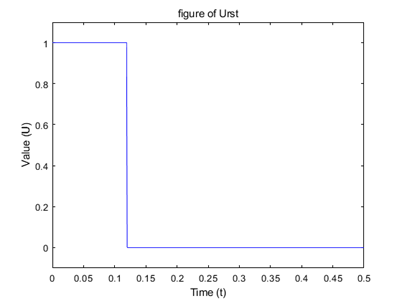
图4 电平模拟图

3.1.2 解析解
由方程
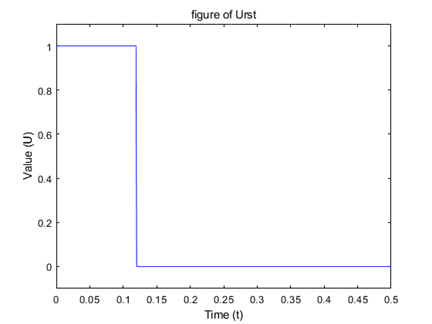
图6 电平与时间关系图
由图6可知,当t<0.12s时,输出为电平1,当t<0.12s时,输出为电平0.高电平持续时长大于2个机器周期。
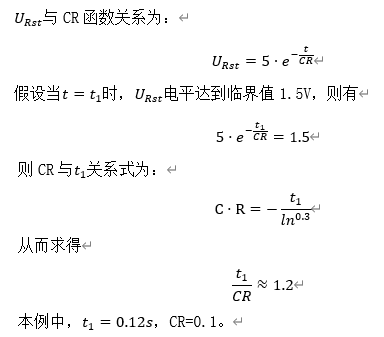
(2)关于CR参数选取:
CR的取值与时长有直接关系,CR的取值有两种方式,其一,采用经验法,即模仿已有电路取相近值,再通过取增量进行仿真微调;其二,采用函数法,即根据上述方程,计算CR与时长的关系,从而根据t精准调节CR乘积值。
3.2.2 软件仿真
利用Multisim对该电路进行仿真,如下图:

图7 电路仿真原理图
设定相应的值,可以通过观察示波器显示电平的变化。由图8可知,当电平从5V下降到1.5V时,用时0.12s。
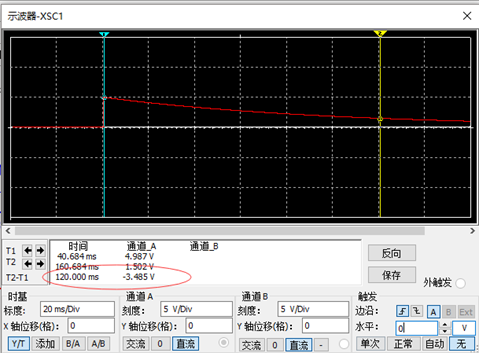
图8 示波器仿真图象
四、结论
由上述分析可知,当采用RC电路复位时,复位引脚电平与时间的关系式为:,经过仿真,可以发现,调整不同的CR值,可以得到不同的高电平持续时间。如果单片机晶振为12MHZ,那么复位电路的CR值可根据关系式进行调节。