1.命名规则
2.#pragma pack使用
#pragma pack 1
保证字节对齐 置结构体的边界对齐为1个字节,也就是所有数据在内存中是连续存储的
struct s
{
char ch;
int i;
};
char 1个字节 int 4个字节
若不加#pragma pack ,则占内存4+4=8个
加上#pragma pack, 则占内存4+1=5个字节
3.GPIO的配置
4种输入模式:输入浮空、输入上拉、输入下拉、模拟输入
4种输出模式:开漏输出、开漏复用功能、推挽式输出、推挽式复用功能
eg:
1 //GPIO设置程序 2 GPIO_InitTypeDef GPIO_InitStructure; 3 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOD, ENABLE);//使能 PA,PD 端口时钟 4 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //PA8 端口配置 5 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 6 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//IO 口速度为 50MHz 7 GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化 GPIOA.8
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState);
用于配置内置外设时钟状态
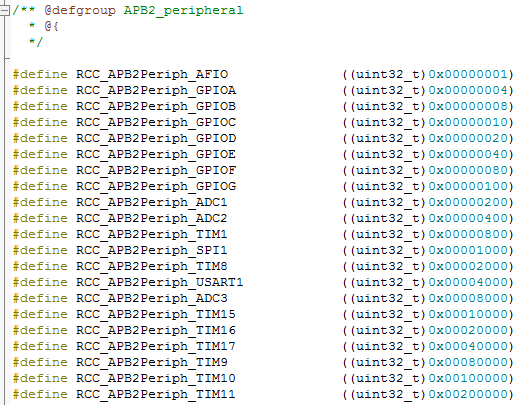
RCC_APB2Periph===========>
void GPIO_Init(GPIO_TypeDef* GPIOx,GPIO_InitTypeDef* GPIO_InitStruct);
用于对GPIO口初始化
在STM32中选用IO模式 (1) 浮空输入_IN_FLOATING ——浮空输入,可以做KEY识别,RX1 (2) 带上拉输入_IPU——IO内部上拉电阻输入 (3) 带下拉输入_IPD—— IO内部下拉电阻输入 (4) 模拟输入_AIN ——应用ADC模拟输入,或者低功耗下省电 (5) 开漏输出_OUT_OD ——IO输出0接GND,IO输出1,悬空,需要外接上拉电阻,才能实现输出高电平。当输出为1时,IO口的状态由上拉电阻拉高电平,但由于是开漏输出模式,这样IO口也就可以由外部电路改变为低电平或不变。可以读IO输入电平变化,实现C51的IO双向功能 (6)推挽输出_OUT_PP ——IO输出0-接GND, IO输出1 -接VCC,读输入值是未知的 (7)复用功能的推挽输出_AF_PP ——片内外设功能(I2C的SCL,SDA) (8)复用功能的开漏输出_AF_OD——片内外设功能(TX1,MOSI,MISO.SCK.SS) STM32设置实例: (1)模拟I2C使用开漏输出_OUT_OD,接上拉电阻,能够正确输出0和1;读值时先GPIO_SetBits(GPIOB, GPIO_Pin_0);拉高,然后可以读IO的值;使用GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0); (2)如果是无上拉电阻,IO默认是高电平;需要读取IO的值,可以使用带上拉输入_IPU和浮空输入_IN_FLOATING和开漏输出_OUT_OD; void RCC_APB2PeriphClockCmd(u32 RCC_APB2Periph, FunctionalState NewState)
4.外部中断
常用库函数
1)设置IO口与中断线的映射关系
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
2)初始化中断线
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct);
3)获取中断线中断状态
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line);
4)清除中断线上的中断标志位
void EXTI_ClearITPendingBit(uint32_t EXTI_Line);
外部中断的一般配置步骤:
1.初始化IO口为输入
GPIO_Init();
2.开启IO复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
3.设置IO口与中断线的映射关系
void GPIO_EXTILineConfig();
4.初始化线上中断,设置触发条件等
EXTI_Init();
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct); EXTI_InitStructure.EXTI_Line=EXTI_Line2; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_Init(&EXTI_InitStructure); typedef struct { uint32_t EXTI_Line; //指定要配置的中断线 EXTIMode_TypeDef EXTI_Mode; //模式:事件 OR中断 EXTITrigger_TypeDef EXTI_Trigger;//触发方式:上升沿/下降沿/双沿触发 FunctionalState EXTI_LineCmd; //使能 OR失能 }EXTI_InitTypeDef;
5.配置中断分组(NVIC),并使能中断
NVIC_Init();
6.编写中断服务函数
EXTIx_IRQHandler();
7.清除中断标志位
EXTI_ClearITPendingBit();
完整一点的例子
1 GPIO_InitTypeDef GPIO_InitStructure; 2 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE); 3 /* Configure PD.03, PC.04, as input floating */ 4 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4; 5 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 6 GPIO_Init(GPIOD, &GPIO_InitStructure); 7 GPIO_EXTILineConfig(GPIO_PortSourceGPIOD, GPIO_PinSource3); //PD3作为外部中断引脚 8 9 EXTI_InitTypeDef EXTI_InitStructure; 10 // Configure EXTI Line3 to generate an interrupt on falling edge 11 EXTI_InitStructure.EXTI_Line = EXTI_Line3; 12 EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; 13 EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; 14 EXTI_InitStructure.EXTI_LineCmd = ENABLE; 15 EXTI_Init(&EXTI_InitStructure); 16 17 void EXTI3_IRQHandler(void) 18 { 19 if(EXTI_GetITStatus(EXTI_Line3) != RESET) 20 { 21 GPIO_SetBits(GPIOC, GPIO_Pin_4| GPIO_Pin_5 ); 22 23 EXTI_ClearITPendingBit(EXTI_Line3); 24 } 25 }
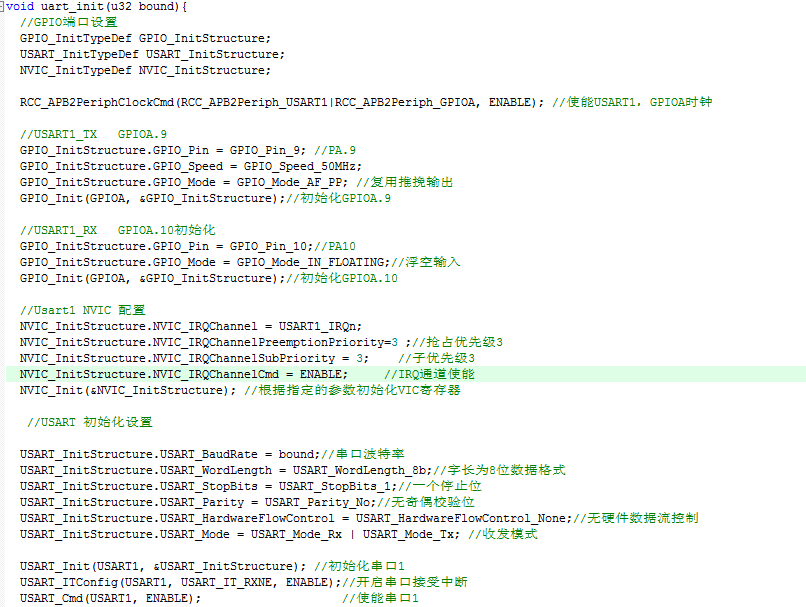
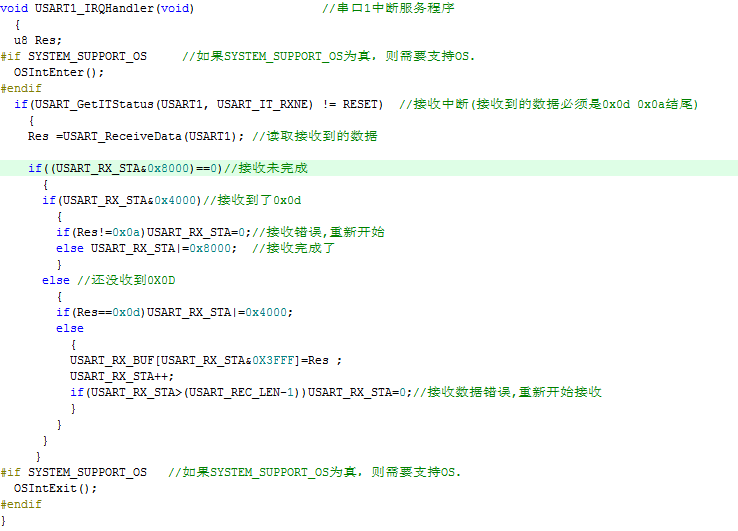
5.串口中断
1)串口时钟使能,gpio时钟使能
RCC_APB2PeriphClockCmd();
2)串口复位
USART_DeInit();---->不是必须的步骤
3)GPIO端口模式设置
GPIO_Init();
4)串口参数初始化
USART_Init();
5)开启中断并且初始化NVIC
NVIC_Init();
USART_ITConfig();
6)使能串口
USART_Cmd();
7)编写中断处理函数
USARTx_IRQHandler();
8)串口数据收发
void USART_SendData();
uint16_t USART_ReceiveData();
9)串口传输状态获取
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx,uint16_t USART_FLAG)
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
较完整的例子: