这个是鉴于另一个Github上的项目学习的
https://github.com/chaoli2/rviz_teleop_commander/tree/master/src
其中代码注释很清楚,大家也可以去看源代码
首先是CmakeList.txt文件
cmake_minimum_required(VERSION 2.8.3) project(bing_pannel) find_package(catkin REQUIRED COMPONENTS rviz) catkin_package() include_directories(${catkin_INCLUDE_DIRS}) link_directories(${catkin_LIBRARY_DIRS}) set(CMAKE_AUTOMOC ON) if(rviz_QT_VERSION VERSION_LESS "5") message(STATUS "Using Qt4 based on the rviz_QT_VERSION: ${rviz_QT_VERSION}") find_package(Qt4 ${rviz_QT_VERSION} EXACT REQUIRED QtCore QtGui) include(${QT_USE_FILE}) else() message(STATUS "Using Qt5 based on the rviz_QT_VERSION: ${rviz_QT_VERSION}") find_package(Qt5 ${rviz_QT_VERSION} EXACT REQUIRED Core Widgets) set(QT_LIBRARIES Qt5::Widgets) endif() add_definitions(-DQT_NO_KEYWORDS) set(SOURCE_FILES src/bing_pannel.cpp ##这里是你的主文件 ${MOC_FILES} ) add_library(${PROJECT_NAME} ${SOURCE_FILES}) target_link_libraries(${PROJECT_NAME} ${QT_LIBRARIES} ${catkin_LIBRARIES}) install(TARGETS ${PROJECT_NAME} ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION} LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION} RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} ) install(FILES plugin_discription.xml ##这里是你的plugin_discription.xml DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION})
只要在workspace下catkin_make后,这个包里的插件便直接安装了。package.xml文件应该如下:
<?xml version="1.0"?> <package format="1"> <name>bing_pannel</name> <version>0.0.0</version> <description>The bing_pannel package</description> <!-- One maintainer tag required, multiple allowed, one person per tag --> <!-- Example: --> <!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> --> <maintainer email="bing@todo.todo">bing</maintainer> <!-- One license tag required, multiple allowed, one license per tag --> <!-- Commonly used license strings: --> <!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 --> <license>TODO</license> <!-- Url tags are optional, but multiple are allowed, one per tag --> <!-- Optional attribute type can be: website, bugtracker, or repository --> <!-- Example: --> <!-- <url type="website">http://wiki.ros.org/bing_pannel</url> --> <!-- Author tags are optional, multiple are allowed, one per tag --> <!-- Authors do not have to be maintainers, but could be --> <!-- Example: --> <!-- <author email="jane.doe@example.com">Jane Doe</author> --> <!-- The *depend tags are used to specify dependencies --> <!-- Dependencies can be catkin packages or system dependencies --> <!-- Examples: --> <!-- Use depend as a shortcut for packages that are both build and exec dependencies --> <!-- <depend>roscpp</depend> --> <!-- Note that this is equivalent to the following: --> <!-- <build_depend>roscpp</build_depend> --> <!-- <exec_depend>roscpp</exec_depend> --> <!-- Use build_depend for packages you need at compile time: --> <!-- <build_depend>message_generation</build_depend> --> <!-- Use build_export_depend for packages you need in order to build against this package: --> <!-- <build_export_depend>message_generation</build_export_depend> --> <!-- Use buildtool_depend for build tool packages: --> <!-- <buildtool_depend>catkin</buildtool_depend> --> <!-- Use exec_depend for packages you need at runtime: --> <!-- <exec_depend>message_runtime</exec_depend> --> <!-- Use test_depend for packages you need only for testing: --> <!-- <test_depend>gtest</test_depend> --> <!-- Use doc_depend for packages you need only for building documentation: --> <!-- <doc_depend>doxygen</doc_depend> --> <buildtool_depend>catkin</buildtool_depend> <build_depend>roscpp</build_depend> <build_depend>rviz</build_depend> <build_depend>std_msgs</build_depend> <run_depend>roscpp</run_depend> <run_depend>rviz</run_depend> <run_depend>std_msgs</run_depend> <!-- The export tag contains other, unspecified, tags --> <export> <!-- Other tools can request additional information be placed here --> <rviz plugin="${prefix}/plugin_discription.xml"/> <!-- 这里面可以修改plugin_discription.xml --> </export> </package>
而真正描述的plugin_discription.xml为如下:
<library path="lib/libbing_pannel"> <class name="bing_pannel/BingPannel" type="bing_rviz_plugin::BingPannel" base_class_type="rviz::Panel"> <description> Bing test pannel. </description> </class> </library>
<class name="bing_pannel/BingPannel" type="bing_rviz_plugin::BingPannel" base_class_type="rviz::Panel">
中name中的bing_pannel/BingPannel里,写的是package的名字加class type中是namespace加class名。
我们在src文件夹下加入bing_pannel.cpp和bing_pannel.h。这个package的文件夹如下。
我们先看.h文件。
#ifndef BING_PANNEL_H #define BING_PANNEL_H #include <ros/ros.h> #include <ros/console.h> #include <rviz/panel.h> class QLineEdit; namespace bing_rviz_plugin { class BingPannel: public rviz::Panel { Q_OBJECT public: BingPannel( QWidget* parent = 0 ); virtual void load( const rviz::Config& config ); virtual void save( rviz::Config config ) const; public Q_SLOTS: void setTopic( const QString& topic ); protected Q_SLOTS: void sendVel(); void update_Linear_Velocity(); void update_Angular_Velocity(); void updateTopic(); protected: QLineEdit* output_topic_editor_; QString output_topic_; QLineEdit* output_topic_editor_1; QString output_topic_1; ros::Publisher velocity_publisher_; ros::NodeHandle nh_; float linear_velocity_; }; } #endif
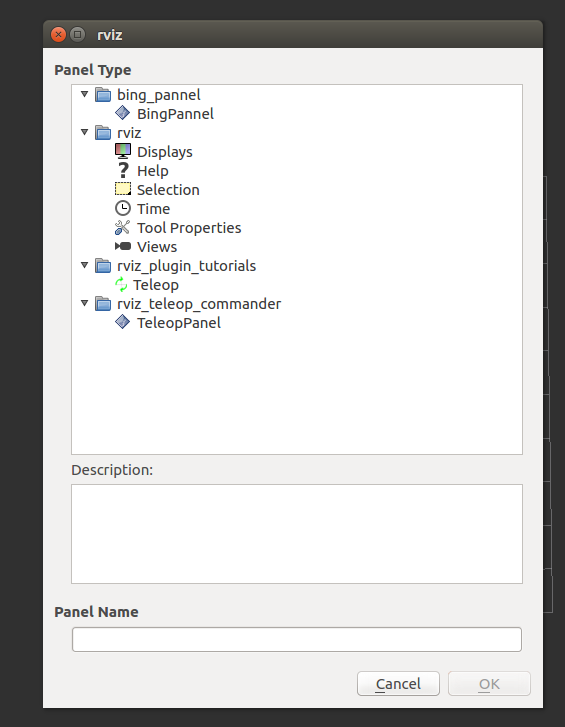
头文件中,rviz/panel.h 就是 pannel头文件。插件显示如下图。在rviz中加入pannel的话,要在标题栏中,找到Panels 〉Add New Panel。选择并加入需要的pannel。

选择添加的Pannel。
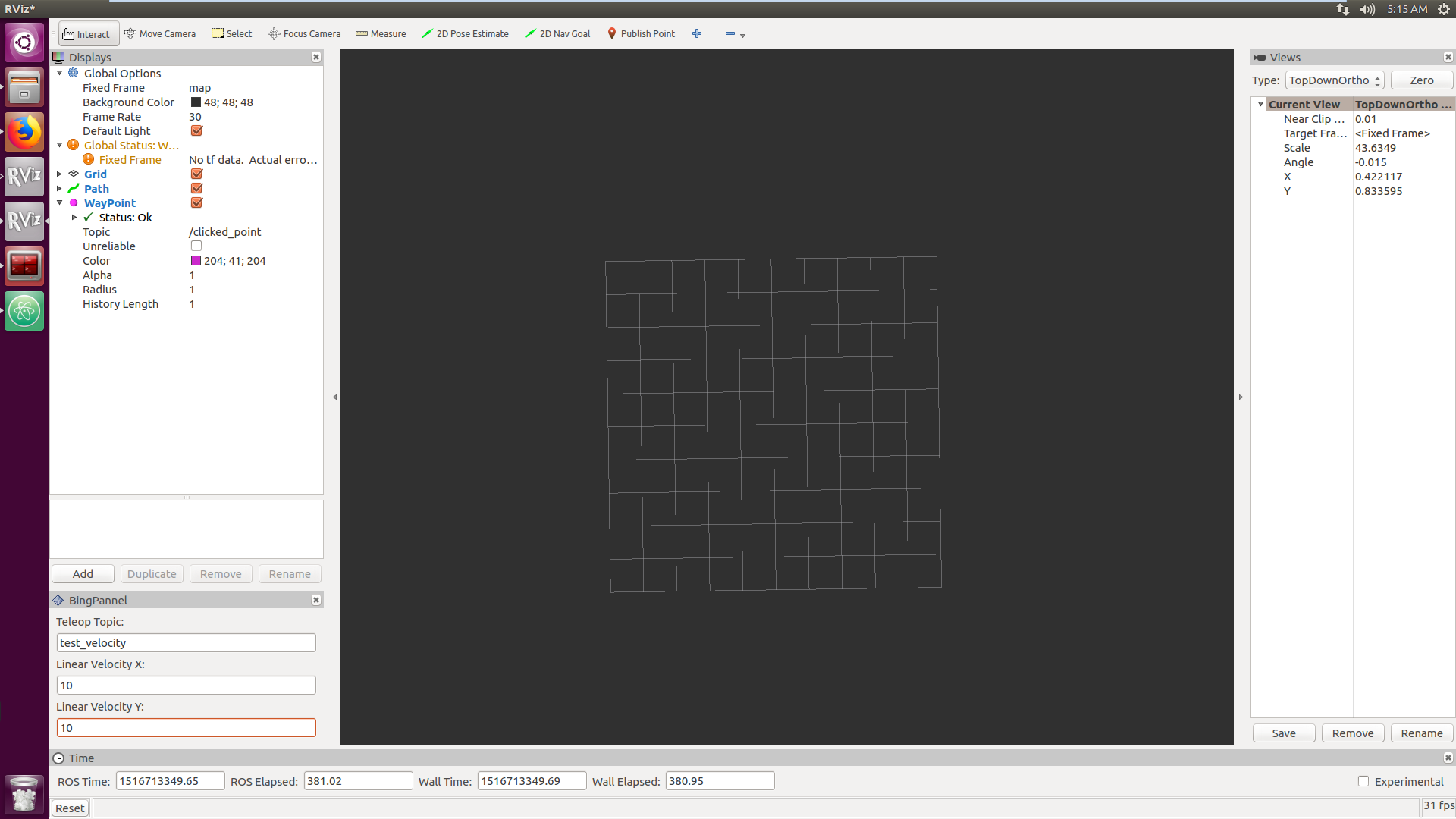
我们这里的插件会通过文本框里的输入发送一个输入的Topic名字的消息。在后面需要填写速度X和速度Y,并且回车就可以发布消息了。
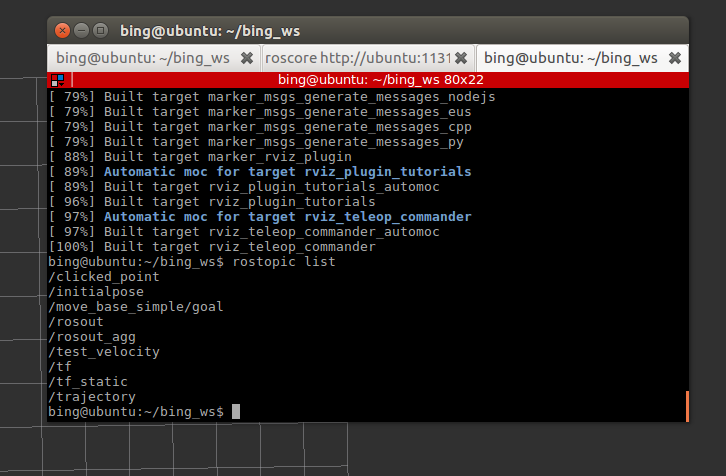
回车后,rostopic list会显示/test_velocity。我们这里发布的是geometry_msgs::Twist。
下面我们的代码,里面是.h文件。
#ifndef BING_PANNEL_H #define BING_PANNEL_H #include <ros/ros.h> #include <ros/console.h> #include <rviz/panel.h> class QLineEdit; namespace bing_rviz_plugin { class BingPannel: public rviz::Panel { Q_OBJECT public:
//用QWigdet的实例来实现GUI界面 BingPannel( QWidget* parent = 0 ); virtual void load( const rviz::Config& config ); virtual void save( rviz::Config config ) const; public Q_SLOTS:
//当填写完时候,回车后,执行会调函数 void setTopic( const QString& topic ); protected Q_SLOTS: void sendVel(); void update_Linear_Velocity_X(); void update_Linear_Velocity_Y(); void updateTopic(); protected:
//这里是三个显示的文字框的定义 QLineEdit* output_topic_editor_; QString output_topic_; QLineEdit* output_topic_editor_1; QString output_topic_1; QLineEdit* output_topic_editor_2; QString output_topic_2; //Ros消息发布 ros::Publisher velocity_publisher_; ros::NodeHandle nh_;
//x速度,y速度 float linear_velocity_X; float linear_velocity_Y; }; } #endif
相应的.cpp文件如下:
#include <stdio.h> #include <QPainter> #include <QLineEdit> #include <QVBoxLayout> #include <QHBoxLayout> #include <QLabel> #include <QTimer> #include <geometry_msgs/Twist.h> #include <QDebug> #include "bing_pannel.h" namespace bing_rviz_plugin{ BingPannel::BingPannel( QWidget* parent ): rviz::Panel( parent ), linear_velocity_X( 0 ),linear_velocity_Y( 0 ){ //topic窗口 QVBoxLayout* topic_layout = new QVBoxLayout; topic_layout->addWidget( new QLabel( "Teleop Topic:" )); output_topic_editor_ = new QLineEdit; topic_layout->addWidget( output_topic_editor_ ); //xvelocity窗口 topic_layout->addWidget( new QLabel( "Linear Velocity X:" )); output_topic_editor_1 = new QLineEdit; topic_layout->addWidget( output_topic_editor_1 ); //yvelocity窗口 topic_layout->addWidget( new QLabel( "Linear Velocity Y:" )); output_topic_editor_2 = new QLineEdit; topic_layout->addWidget( output_topic_editor_2 ); QHBoxLayout* layout = new QHBoxLayout; layout->addLayout( topic_layout ); setLayout( layout ); QTimer* output_timer = new QTimer( this );
//回车回调函数,设置信号连接 connect( output_topic_editor_, SIGNAL( editingFinished() ), this, SLOT( updateTopic() )); connect( output_topic_editor_1, SIGNAL( editingFinished() ), this, SLOT( update_Linear_Velocity_X() )); connect( output_topic_editor_1, SIGNAL( editingFinished() ), this, SLOT( update_Linear_Velocity_Y() ));
//定时器回调,定时运行sendVel()
connect( output_timer, SIGNAL( timeout() ), this, SLOT( sendVel() )); output_timer->start( 100 ); } //读取x速度 void BingPannel::update_Linear_Velocity_X() { QString temp_string = output_topic_editor_1->text(); float lin = temp_string.toFloat(); linear_velocity_X = lin; }
//读取y速度 void BingPannel::update_Linear_Velocity_Y() { QString temp_string = output_topic_editor_2->text(); float lin = temp_string.toFloat(); linear_velocity_Y = lin; } //更新topic void BingPannel::updateTopic() { setTopic( output_topic_editor_->text() ); } //topic名字 void BingPannel::setTopic( const QString& new_topic ) { if( new_topic != output_topic_ ) { output_topic_ = new_topic; if( output_topic_ == "" ) { velocity_publisher_.shutdown(); } else { velocity_publisher_ = nh_.advertise<geometry_msgs::Twist>( output_topic_.toStdString(), 1 ); } Q_EMIT configChanged(); } } void BingPannel::sendVel() { if( ros::ok() && velocity_publisher_ ) { geometry_msgs::Twist msg; msg.linear.x = linear_velocity_X; msg.linear.y = linear_velocity_Y ; msg.linear.z = 0; msg.angular.x = 0; msg.angular.y = 0; msg.angular.z = 1; velocity_publisher_.publish( msg ); } } void BingPannel::save( rviz::Config config ) const { rviz::Panel::save( config ); config.mapSetValue( "Topic", output_topic_ ); } void BingPannel::load( const rviz::Config& config ) { rviz::Panel::load( config ); QString topic; if( config.mapGetString( "Topic", &topic )) { output_topic_editor_->setText( topic ); updateTopic(); } } } #include <pluginlib/class_list_macros.h> PLUGINLIB_EXPORT_CLASS(bing_rviz_plugin::BingPannel,rviz::Panel )
保存后,catkin_make 就可以在rviz里找到了。
参考:
http://www.guyuehome.com/945