图的存储方式:
一、邻阶矩阵:
这个名字看起来高大上, 其实他就是数值。
我们所学的图就是 点与点之间的关系, 所以 数组的纵向表示起点, 横向表示终点, 两个点之间相连,就标记为1, 否则标记为0.
NPNBB(no picture no bi bi 没有图片别bb)↓
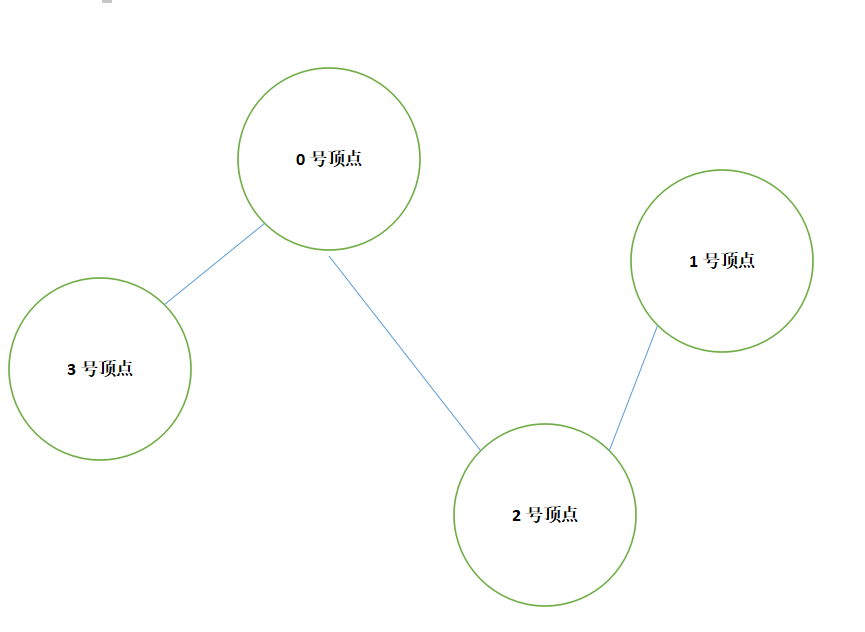
此图为无向图, 连线有 0 3, 0 2,1 2.
因为有4个顶点, 所以4*4的二维数组 map[4][4]。
①首先初始化都为零
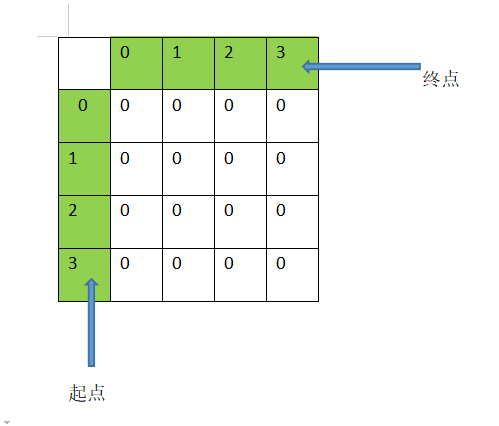
②如果连接相应的map[i][j]标记为1(无向图 map[j][i] 也要标记 1)。
————邻接矩阵的优点就是操作简单, 然而都顶点较多时, 邻接矩阵就会太占内存。
并且邻接矩阵的时间复杂度是O(n^2+e),(e条边), 所以在创建图时很耗时间。
二、邻接表
邻接表, 是通过链表来实现的, 在顶点数量多时, 邻接表相对会有优势。
1、首先邻接表组成:
①表头(也可叫他:顶点表)。
struct VerNode//表头
{
int data;//(如果表头, 是数组这里用不到, 是链表,这里储存顶点的下标)
struct EdgeNode *first;//指向第一个表边。
}
②表边(或者边表)。
struct EdgeNode//表边 { int data;//储存终点的下标 struct EdgeNode *next;//指向下一个表边 }
什么是表头, 顾名思义, 就是一条线的顶点, 表边就是用来储存终点的。
表头可以用数组开辟(这样查找等操作方便), 也可以用单项链表。
2、操作。
还是之前那个图,0 3相连(这里以0 3 为)
scanf("%d %d", &i, &j);//输入边 struct EdgeNode *E;//定义一个表边指针 E = (struct EdgeNode *)malloc(sizeof(struct node));//申请空间 E->data = j;//储存边的终点
//连接操作 E->next = V[i].first;//指向表边、头的first V[i].first = E;//表头再指向新的表边
邻接表在创建图时, 时间复杂度是(n+e)。(n个顶点(因为顶点都要初始化), e条边)
三、边集数组
边集数组是图的另一种存储方式, 简单的说就是一个数组储存着边的起点,终点和权值。
struct Edge//边数组 { int f;//边的起点 int t;//边的终点 int w;//权值 } int v【100】;//顶点数组
按照开始给的图用边集数组表示就是这样

四、前向星
前向星是一个特殊的边集数组, 其特殊性在于他在边集数组的基础上,按照起点进行了一次排序, 优点(相同的起点的边, 就可以邻在一起)。
五、利用c++中vector的 特点(动态数组)来存图;
struct Edge//边表 { int v;//终点 int w;//权值 }; vector<Edge>G[N];//N表示顶点的数量;
其实, vector 很想 邻接表, 相比邻接表(Edge结构体是边表, vector 是一个 Edge类型 的二维动态数组, 相当于 ), 他写起来比邻接表更方便。
这种方法很多人叫他(vector + 前向星)。