RCC时钟配置实验
最近玩了一下Nucleo-L053R8板子,即STM32L053R8T6。浏览了RCC章节后,顺便做了个小实验,现在给大伙分享一下。
实验非常简单,配置一下系统时钟,可以通过肉眼观察LED的闪烁快慢,精确的话,可以通过数字示波器监控RCC的MCO引脚的输出。为了保证实验的严谨性,本次通过数字示波器监控RCC的MCO引脚的输出。
开始实验之前,先给大伙稍微讲一下MCO 时钟输出的知识:
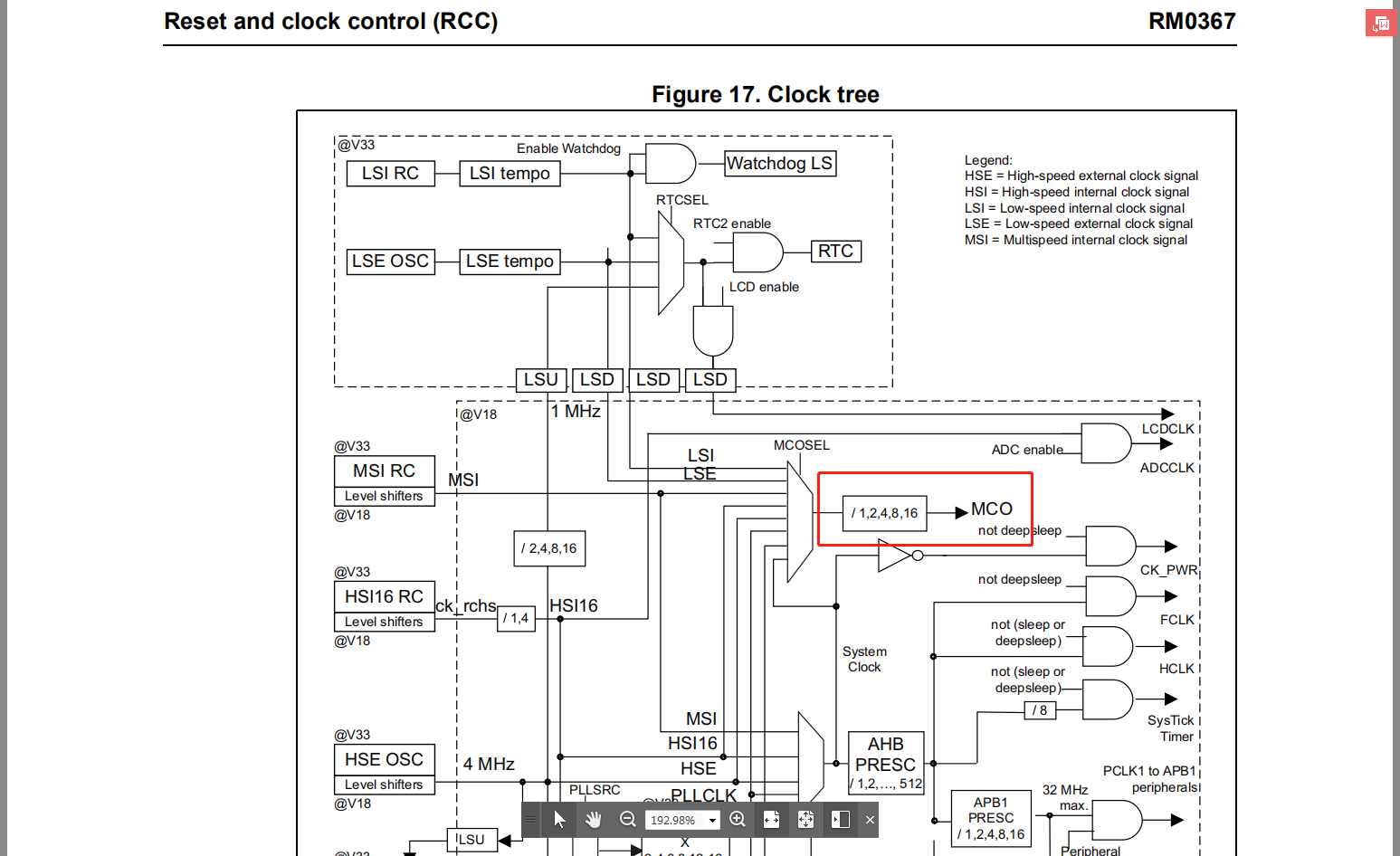
图1 RCC时钟树
MCO 时钟输出:
MCO 是 microcontroller clock output 的缩写,是微控制器时钟输出引脚,在STM32L053R8T6中 由 PA8、PA9复用所得,主要作用是可以对外提供时钟,相当于一个有源晶振。
MCO的时钟来源可以是:LSE、LSI、HSE、HSI 16、PLLCLK、SYSCLK、MSI、HSI 48,具体选哪个由时钟配置寄存器的相应位决定。除了对外提供时钟这个作用之外,我们还可以通过示波器监控 MCO 引脚的时钟输出来验证我们的系统时钟配置是否正确。

图2 MCO时钟来源
STM32CubeMx:
了解了MCO时钟输出的知识后,我们就可以真正开始实验了。
首先,我们通过STM32CubeMx生成我们需要的项目工程。STM32CubeMX 是意法半导体STMCube™的主动原创,可以减轻开发工作、时间和费用。STM32Cube 覆盖了 STM32 系列。STM32Cube 包括 STM32CubeMX,STM32CubeMX是一款图形化软件设置工具,允许使用图形化向导来生成 C 初始化代码。它也集成了 一个全面的软件平台,支持每一个系列(例如STM32F4系列的STM32CubeF4)。通俗地说,一方面大大减少了工作量,另一方面也有利于菜鸟的入门学习。通过STM32CubeMx生成项目工程的主要步骤如下:
Nucleo-L053R8板子有两个RCC_MCO引脚,分别为:
RCC_MCO1 -----> PA8
RCC_MCO2 -----> PA9
本次实验监控PA8引脚输出,测试的系统时钟来源于HSI,配置成32MHz。你也可以选用PA9输出或者配置不同的系统时钟。
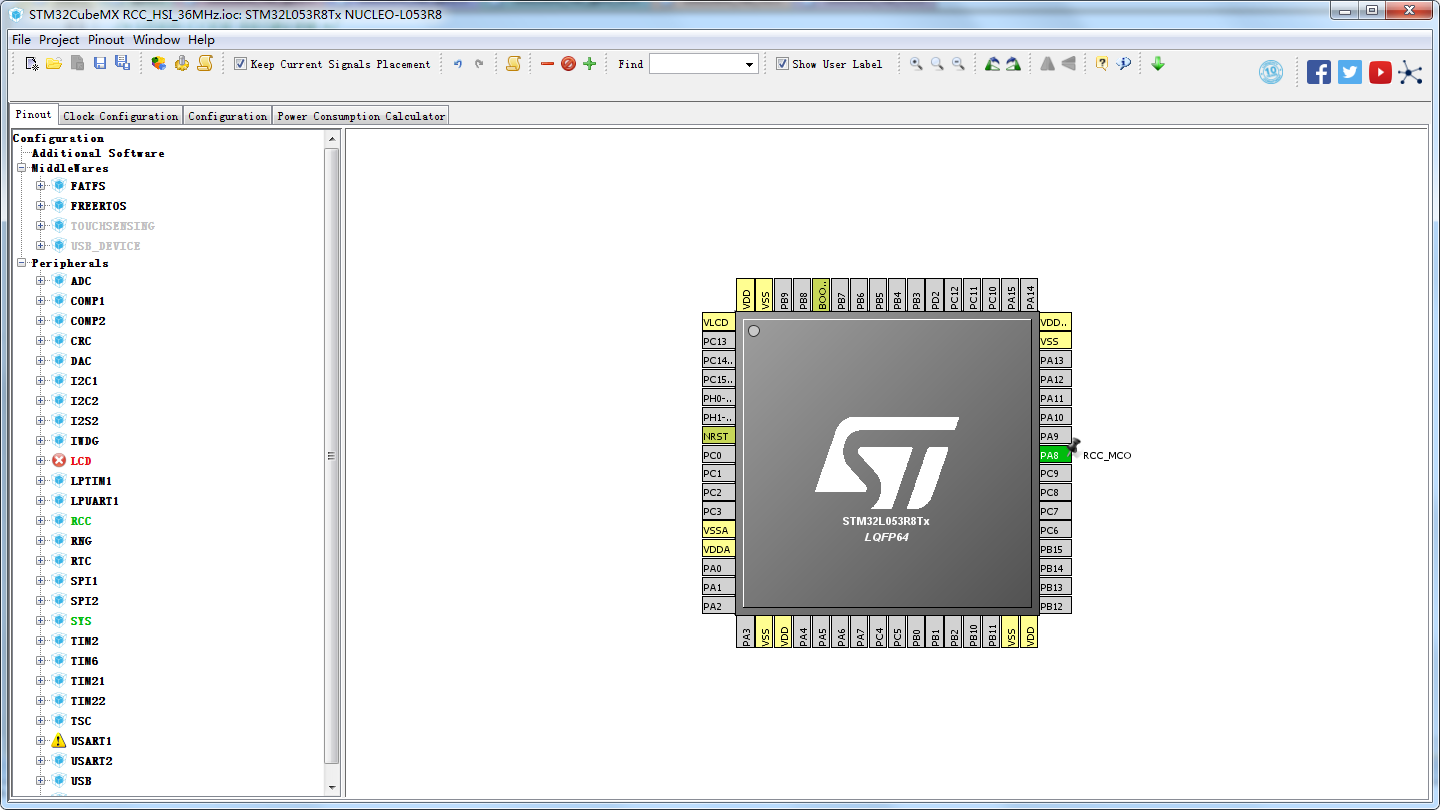
图3 引脚配置
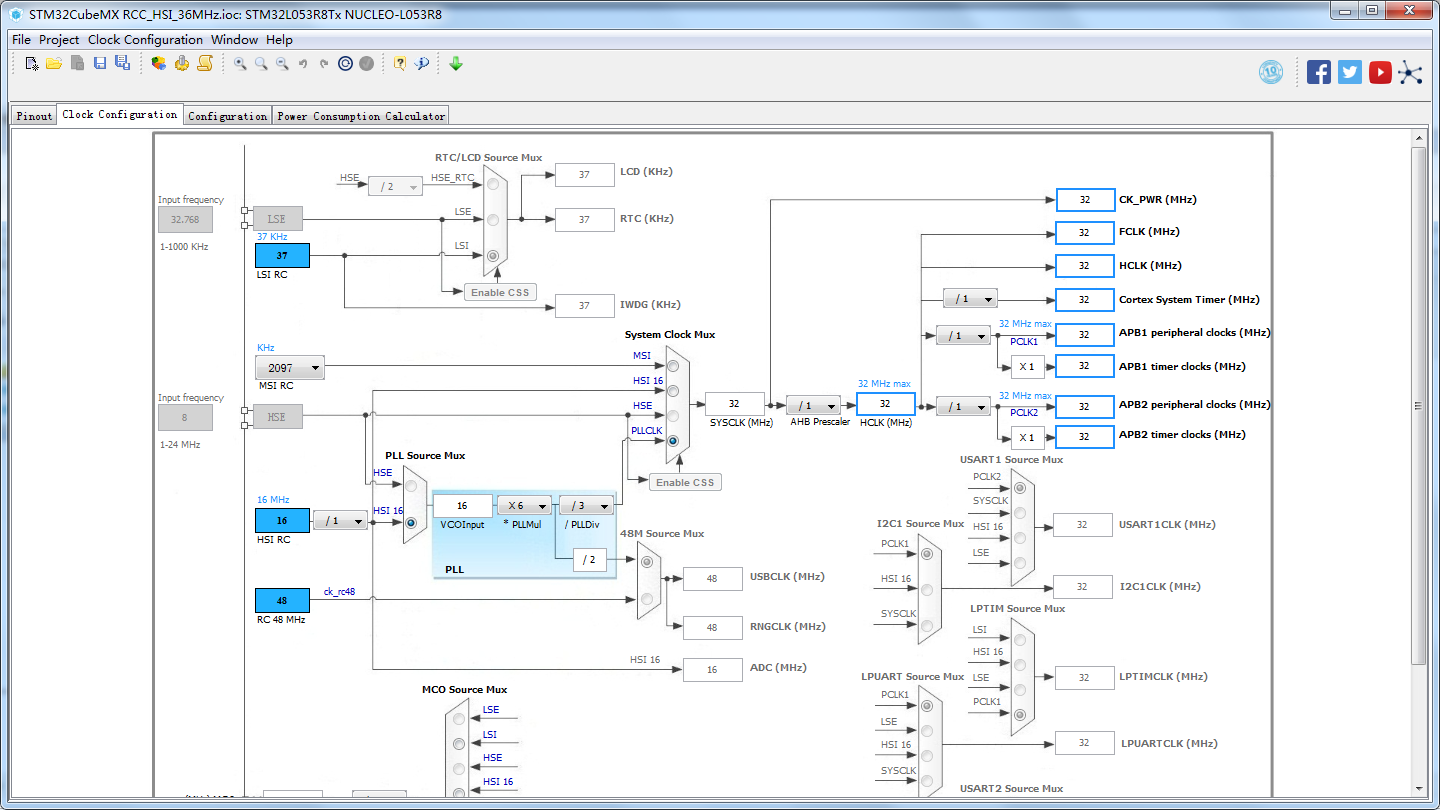
图4 时钟配置

图5 生成项目工程
到了这一步骤,就可以Open Project开始实验了。代码很简单,且项目工程都已配置好相关GPIO和RCC时钟,直接用数字示波器监控PA8引脚的输出(MCO时钟输出)来判断我们的系统时钟是否配置正确即可。
部分代码如下:
1 /** Configure pins 2 PA8 ------> RCC_MCO 3 */ 4 static void MX_GPIO_Init(void) 5 { 6 7 GPIO_InitTypeDef GPIO_InitStruct; 8 9 /* GPIO Ports Clock Enable */ 10 __HAL_RCC_GPIOA_CLK_ENABLE(); 11 12 /*Configure GPIO pin : PA8 */ 13 GPIO_InitStruct.Pin = GPIO_PIN_8; 14 GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; 15 GPIO_InitStruct.Pull = GPIO_NOPULL; 16 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; 17 GPIO_InitStruct.Alternate = GPIO_AF0_MCO; 18 HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); 19 20 } 21 22 23 /** 24 * @brief System Clock Configuration 25 * @retval None 26 */ 27 void SystemClock_Config(void) 28 { 29 30 RCC_OscInitTypeDef RCC_OscInitStruct; 31 RCC_ClkInitTypeDef RCC_ClkInitStruct; 32 33 /**Configure the main internal regulator output voltage 34 */ 35 __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); 36 37 /**Initializes the CPU, AHB and APB busses clocks 38 */ 39 RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI; 40 RCC_OscInitStruct.HSIState = RCC_HSI_ON; 41 RCC_OscInitStruct.HSICalibrationValue = 16; 42 RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; 43 RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI; 44 RCC_OscInitStruct.PLL.PLLMUL = RCC_PLLMUL_6; 45 RCC_OscInitStruct.PLL.PLLDIV = RCC_PLLDIV_3; 46 if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) 47 { 48 _Error_Handler(__FILE__, __LINE__); 49 } 50 51 /**Initializes the CPU, AHB and APB busses clocks 52 */ 53 RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK 54 |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; 55 RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; 56 RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; 57 RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; 58 RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; 59 60 if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK) 61 { 62 _Error_Handler(__FILE__, __LINE__); 63 } 64 65 HAL_RCC_MCOConfig(RCC_MCO1, RCC_MCO1SOURCE_SYSCLK, RCC_MCODIV_1); 66 67 /**Configure the Systick interrupt time 68 */ 69 HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); 70 71 /**Configure the Systick 72 */ 73 HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); 74 75 /* SysTick_IRQn interrupt configuration */ 76 HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0); 77 } 78 79 int main(void) 80 { 81 /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ 82 HAL_Init(); 83 84 /* Initialize all configured peripherals */ 85 MX_GPIO_Init(); 86 87 /* Configure the system clock */ 88 SystemClock_Config(); 89 90 while (1) 91 { 92 } 93 }
一开始,我把编译好的程序下载到开发板里,发现数字示波器无输出波形,然后看了一下代码,发现在main函数中,系统时钟配置函数SystemClock_Config()放在了GPIO配置函数MX_GPIO_Init()之前了,而RCC_MCO配置函数放置在系统时钟配置函数中,这就导致了RCC_MCO的GPIO引脚并未配置成复用推挽输出就进行了RCC_MCO配置。我把GPIO配置函数MX_GPIO_Init()放在系统时钟配置函数SystemClock_Config()之前,数字示波器就出现了波形。所以,我们平时在编写代码的时候,应养成一个良好的编程习惯。以上只是我个人对问题的解答,若有不对之处,欢迎指出,共同学习,共同进步。
如果你不清楚Nucleo板子上PA8、GND具体在哪个引脚,那么你可以查阅STM32 Nucleo-64 boards的用户手册(User manual)---> Hardware layout and configuration ---> Extension connectors ---> Figure 20.NUCLEO-L053R8
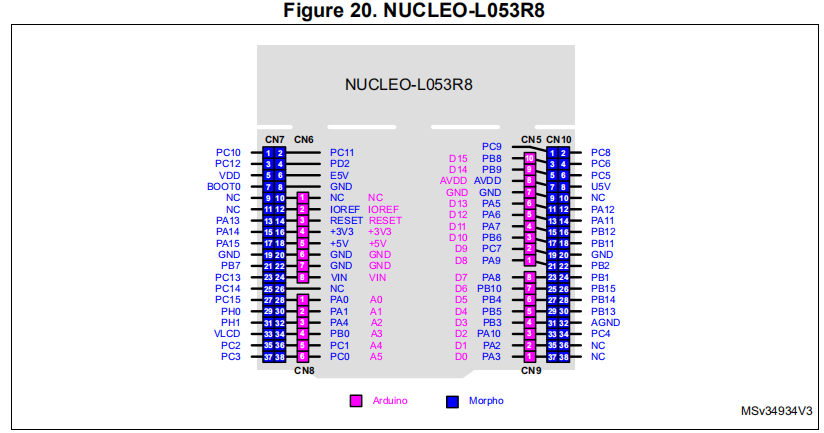
图6 Extension Connection引脚图
根据上面的引脚图,用两根杜邦线从Nucleo板子上引出PA8、GND,然后用数字示波器来监控。实物连接如下:
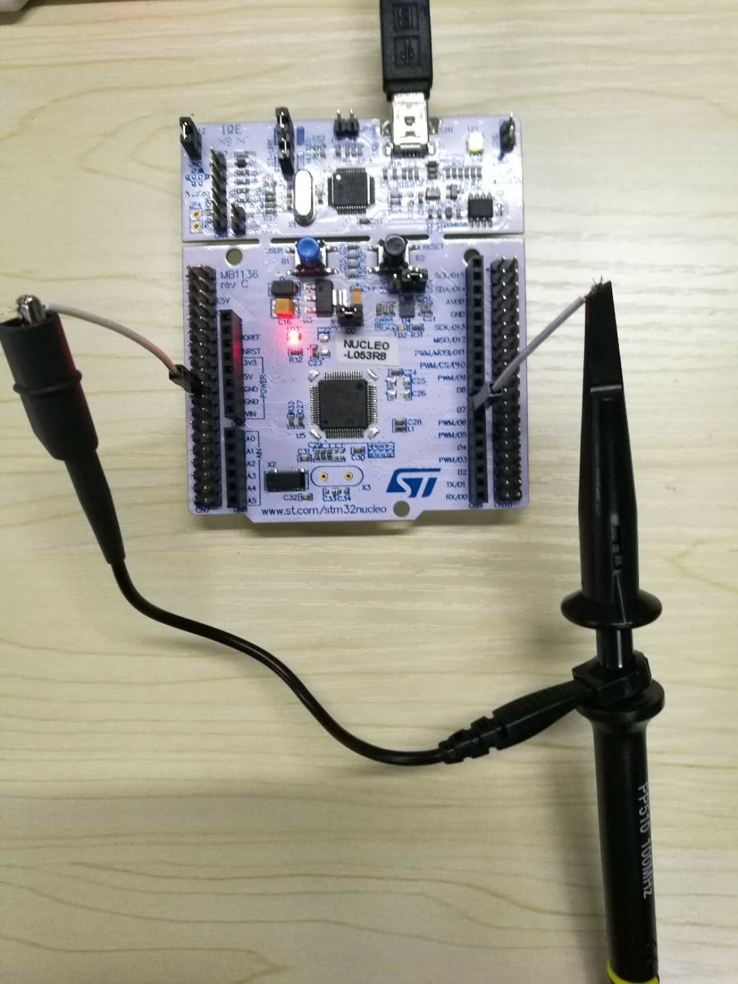
图7 实物连接图
把编译好的程序下载到开发板,设置不同的系统时钟,用示波器监控 MCO 引脚输出的波形频率来判断我们的系统时钟是否配置正确。
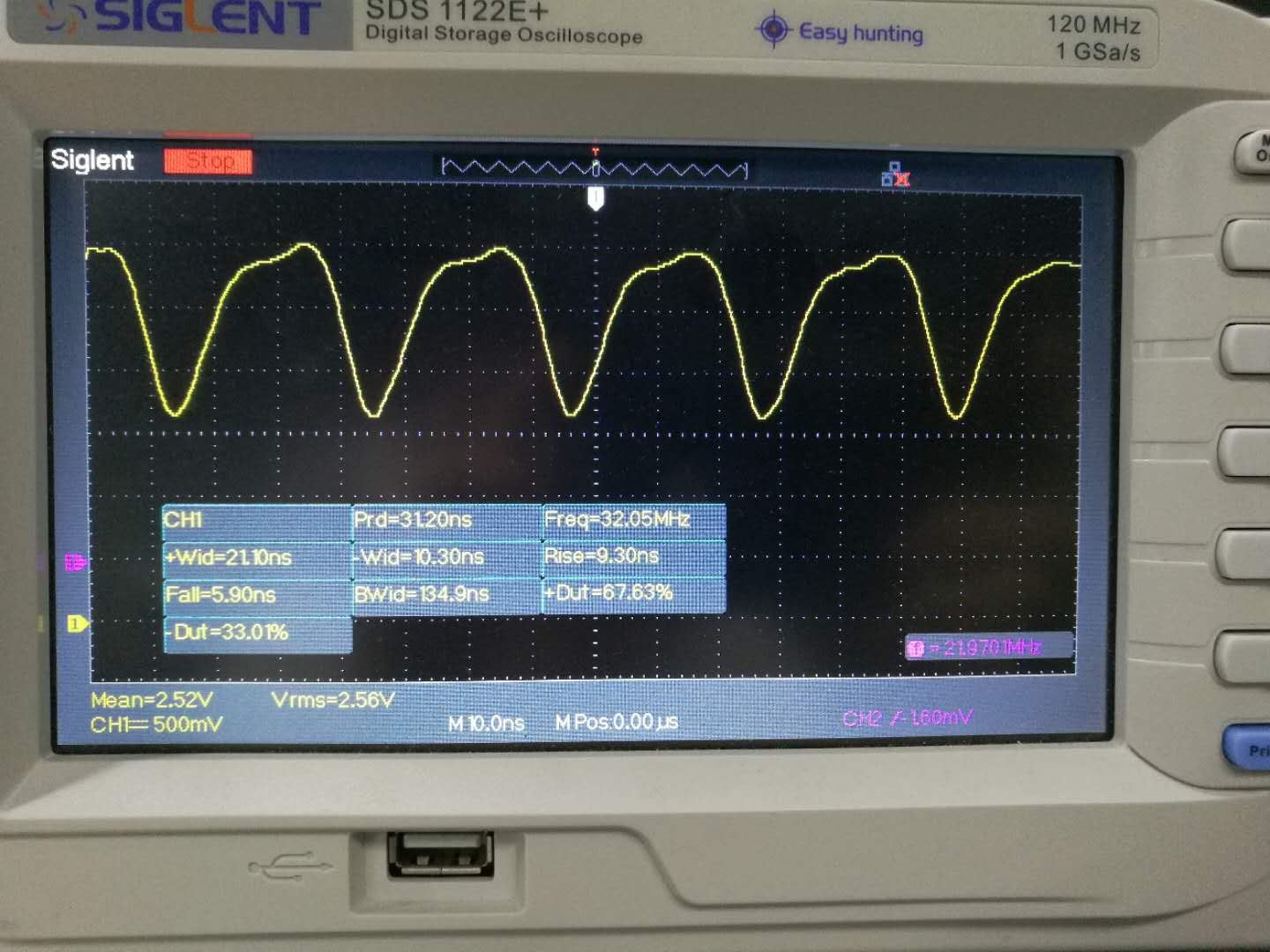
图8 数字示波器波形图
从波形图可见,监控到RCC时钟频率为32MHZ,与实验时钟配置相符。以上就是RCC时钟配置的一个小实验。希望对有需要的同学有所帮助。谢谢!!!