1.安装frida
本机环境mac 或者win10 (AMD64)都一样、python3.6.4
pip install frida
如果报错: ERROR: Command errored out with exit status 1
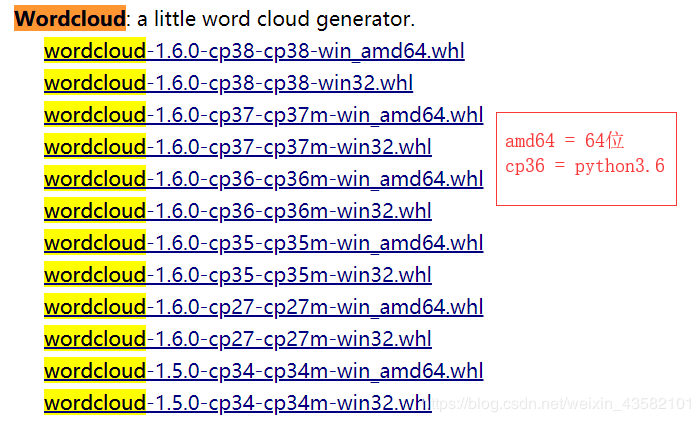
解决方法: 安装Wordcloud.whl文件,下载地址:
https://www.lfd.uci.edu/~gohlke/pythonlibs/
找到对应自己的版本.下载后 pip install wordcloud…whl 即可.
pip install frida-tools
安装完成后frida后,再pip安装frida-tools
2.安装木木模拟器
直接去官网下载. http://mumu.163.com/
此过程省略… 下载后首先:
开启模拟器的root权限

打开模拟器USB调试
在开发者选项中。

3.下载frida服务端
到 https://github.com/frida/frida/releases 下载相应的版本
这里是给木木模拟器安装Android版本,所以下载下面这个:
frida-server-12.8.20-android-x86.xz
解压缩上面的文件,并且重命名为frida-server
4. 安装adb工具
方法有很多,我这里是下载了android studio,然后在环境变量中设置了adb的路径,使用adb devices 能看到木木浏览器

5. 将frida-server 通过adb push指令推送到木木浏览器下的/data/local/tmp目录下,然后开启权限并启动
adb root # might be required adb push frida-server /data/local/tmp/ adb shell "chmod 777 /data/local/tmp/frida-server" adb shell "/data/local/tmp/frida-server &"
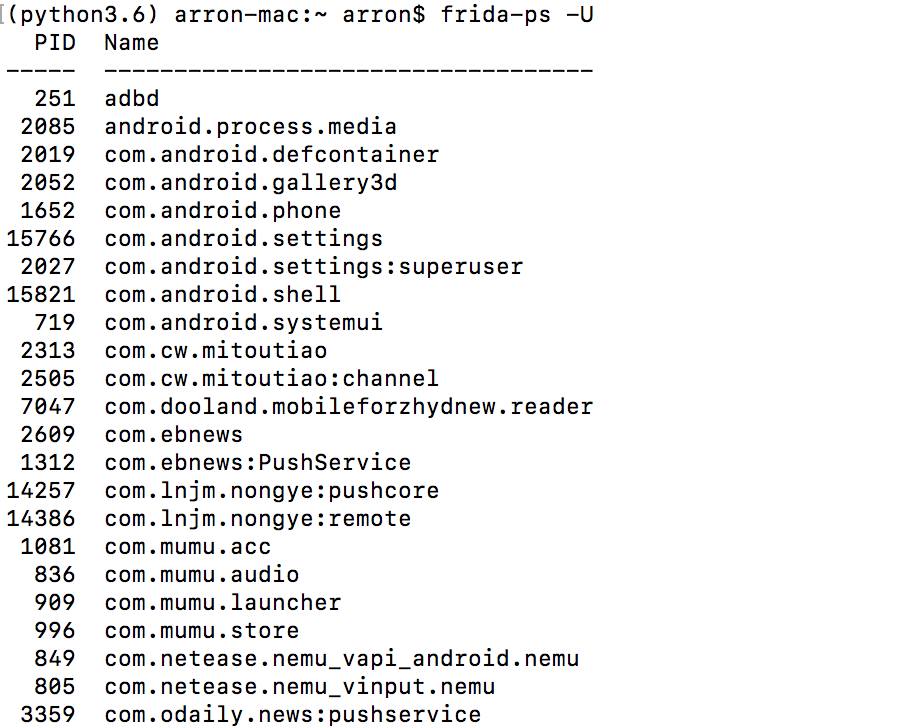
6.查看是否启动成功
重新打开一个cmd窗口, 执行下面的命令, 查看当前运行的进程. 有输出则说明启动成功.
frida-ps -U
7.如果需要进行debug的话,将手机端的端口转发到PC端进行通信
adb forward tcp:27042 tcp:27042 adb forward tcp:27043 tcp:27043
使用python调用
简单测试:
import frida import sys #获取设备信息 rdev = frida.get_remote_device() #获取在前台运行的APP front_app = rdev.get_frontmost_application() print (front_app)
你在模拟器上运行一个微信。
weixin = "com.tencent.mm"
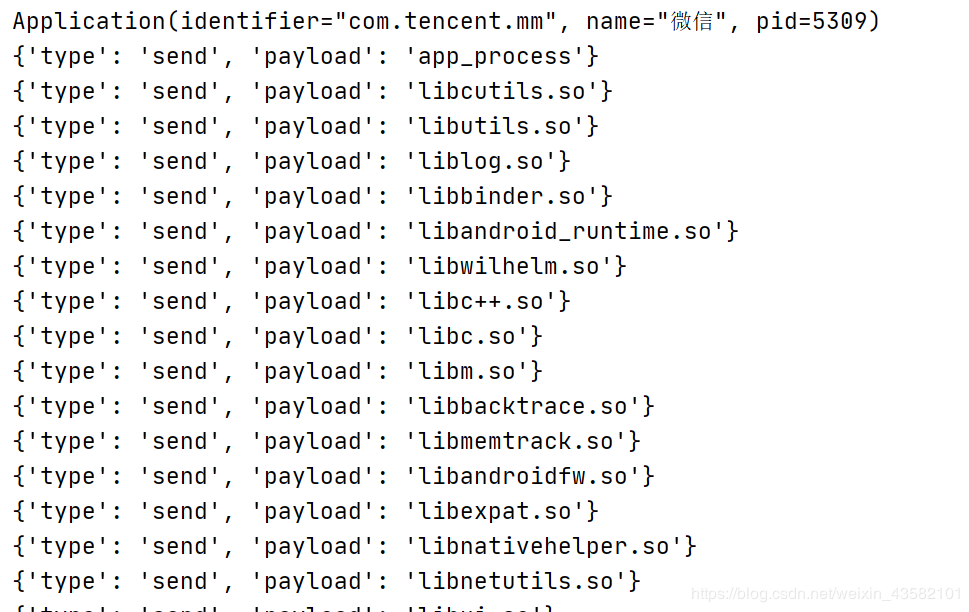
# 枚举进程中加载指定模块中的导出函数
session = rdev.attach(weixin) # 也可以使用attach(pid)的方式
# 我找了半天,老版本的enumerateModules方法没了,现在只能通过js入口
jscode = """ Process.enumerateModules({ onMatch:function(exp){ send(exp.name); }, onComplete:function(){ send("stop"); } }) """ script = session.create_script(jscode) def on_message(message, data): print(message) script.on('message', on_message) script.load() sys.stdin.read()