
# 1 灰度 最重要 2 基础 3 实时性 # 定点-》浮点 +- */ >> # r*0.299+g*0.587+b*0.114 import cv2 import numpy as np img = cv2.imread('image0.jpg',1) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] # RGB R=G=B = gray (R+G+B)/3 dst = np.zeros((height,width,3),np.uint8) for i in range(0,height): for j in range(0,width): (b,g,r) = img[i,j] # 浮点转定点 b = int(b) g = int(g) r = int(r) gray = (r*1+g*2+b*1)/4 #gray = (int(b)+int(g)+int(r))/3 dst[i,j] = np.uint8(gray) cv2.imshow('dst',dst) cv2.waitKey(0)
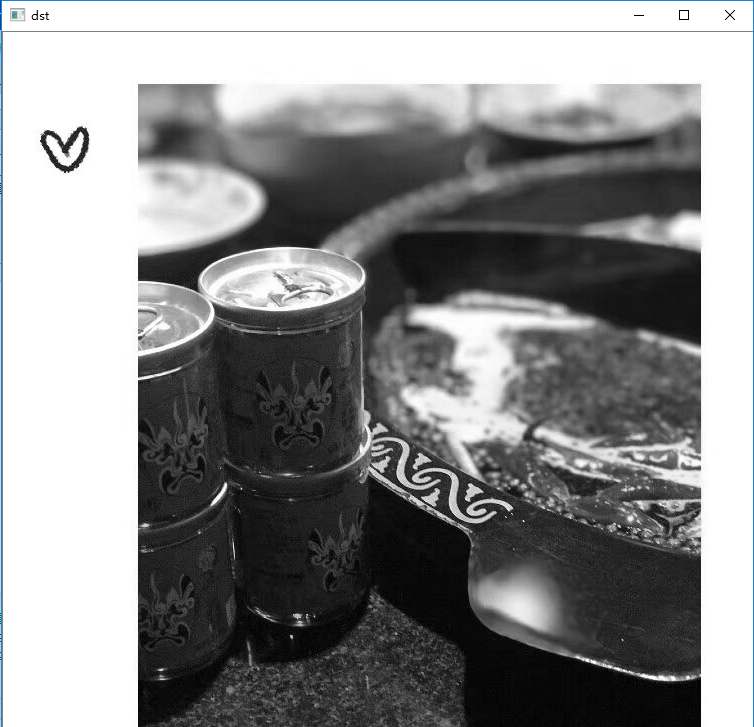
# 1 灰度 最重要 2 基础 3 实时性 # 定点-》浮点 +- */ >> # r*0.299+g*0.587+b*0.114 import cv2 import numpy as np img = cv2.imread('image0.jpg',1) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] # RGB R=G=B = gray (R+G+B)/3 dst = np.zeros((height,width,3),np.uint8) for i in range(0,height): for j in range(0,width): (b,g,r) = img[i,j] # 浮点转定点 b = int(b) g = int(g) r = int(r) #gray = (r*1+g*2+b*1)/4 gray = (int(b)+int(g)+int(r))/3 dst[i,j] = np.uint8(gray) cv2.imshow('dst',dst) cv2.waitKey(0)

# 1 灰度 最重要 2 基础 3 实时性 # 定点-》浮点 +- */ >> # r*0.299+g*0.587+b*0.114 import cv2 import numpy as np img = cv2.imread('image0.jpg',1) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] # RGB R=G=B = gray (R+G+B)/3 dst = np.zeros((height,width,3),np.uint8) for i in range(0,height): for j in range(0,width): (b,g,r) = img[i,j] # 浮点转定点 b = int(b) g = int(g) r = int(r) #gray = (r*1+g*2+b*1)/4 # 定点转移位 gray = (r+(g<<1)+b)>>2 #gray = (int(b)+int(g)+int(r))/3 dst[i,j] = np.uint8(gray) cv2.imshow('dst',dst) cv2.waitKey(0)
# 1 灰度 最重要 2 基础 3 实时性 # 定点-》浮点 +- */ >> # r*0.299+g*0.587+b*0.114 # 100 1000 10000 import cv2 import numpy as np img = cv2.imread('image0.jpg',1) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] # RGB R=G=B = gray (R+G+B)/3 dst = np.zeros((height,width,3),np.uint8) for i in range(0,height): for j in range(0,width): (b,g,r) = img[i,j] # 浮点转定点 b = int(b) g = int(g) r = int(r) #gray = (r*1+g*2+b*1)/4 # 定点转移位 gray = (r+(g<<1)+b)>>2 #gray = (int(b)+int(g)+int(r))/3 dst[i,j] = np.uint8(gray) cv2.imshow('dst',dst) cv2.waitKey(0)