局部线性嵌入(Locally Linear Embedding,以下简称LLE)也是非常重要的降维方法。和传统的PCA,LDA等关注样本方差的降维方法相比,LLE关注于降维时保持样本局部的线性特征,由于LLE在降维时保持了样本的局部特征,它广泛的用于图像图像识别,高维数据可视化等领域。下面我们就对LLE的原理做一个总结。
1. 流形学习概述
LLE属于流形学习(Manifold Learning)的一种。因此我们首先看看什么是流形学习。流形学习是一大类基于流形的框架。数学意义上的流形比较抽象,不过我们可以认为LLE中的流形是一个不闭合的曲面。这个流形曲面有数据分布比较均匀,且比较稠密的特征,有点像流水的味道。基于流行的降维算法就是将流形从高维到低维的降维过程,在降维的过程中我们希望流形在高维的一些特征可以得到保留。
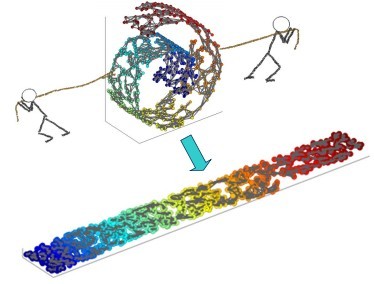
一个形象的流形降维过程如下图。我们有一块卷起来的布,我们希望将其展开到一个二维平面,我们希望展开后的布能够在局部保持布结构的特征,其实也就是将其展开的过程,就想两个人将其拉开一样。
在局部保持布结构的特征,或者说数据特征的方法有很多种,不同的保持方法对应不同的流形算法。比如等距映射(ISOMAP)算法在降维后希望保持样本之间的测地距离而不是欧式距离,因为测地距离更能反映样本之间在流形中的真实距离。
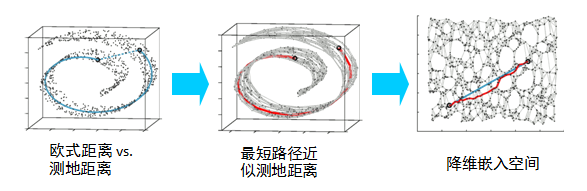
但是等距映射算法有一个问题就是他要找所有样本全局的最优解,当数据量很大,样本维度很高时,计算非常的耗时,鉴于这个问题,LLE通过放弃所有样本全局最优的降维,只是通过保证局部最优来降维。同时假设样本集在局部是满足线性关系的,进一步减少的降维的计算量。
2. LLE思想
现在我们来看看LLE的算法思想。
LLE首先假设数据在较小的局部是线性的,也就是说,某一个数据可以由它邻域中的几个样本来线性表示。比如我们有一个样本x1x1,我们在它的原始高维邻域里用K-近邻思想找到和它最近的三个样本x2,x3,x4x2,x3,x4. 然后我们假设x1x1可以由x2,x3,x4x2,x3,x4线性表示,即:
其中,w12,w13,w14w12,w13,w14为权重系数。在我们通过LLE降维后,我们希望x1x1在低维空间对应的投影x′1x1′和x2,x3,x4x2,x3,x4对应的投影x′2,x′3,x′4x2′,x3′,x4′也尽量保持同样的线性关系,即
也就是说,投影前后线性关系的权重系数w12,w13,w14w12,w13,w14是尽量不变或者最小改变的。
从上面可以看出,线性关系只在样本的附近起作用,离样本远的样本对局部的线性关系没有影响,因此降维的复杂度降低了很多。
下面我们推导LLE算法的过程。
3. LLE算法推导
对于LLE算法,我们首先要确定邻域大小的选择,即我们需要多少个邻域样本来线性表示某个样本。假设这个值为k。我们可以通过和KNN一样的思想通过距离度量比如欧式距离来选择某样本的k个最近邻。
在寻找到某个样本的xixi的k个最近邻之后我们就需要找到找到xixi和这k个最近邻之间的线性关系,也就是要找到线性关系的权重系数。找线性关系,这显然是一个回归问题。假设我们有m个n维样本{x1,x2,...,xm}{x1,x2,...,xm},我们可以用均方差作为回归问题的损失函数:即:
一般我们也会对权重系数wijwij做归一化的限制,即权重系数需要满足
对于不在样本xixi邻域内的样本xjxj,我们令对应的wij=0wij=0
也就是我们需要通过上面两个式子求出我们的权重系数。一般我们可以通过矩阵和拉格朗日子乘法来求解这个最优化问题。
对于第一个式子,我们先将其矩阵化: