题意是:你当前距离高速公路D米,你在高速公路的行驶速度为v1,在其他地方行驶速度是v0 (v1>v0),然后问你在T秒能到达的区域的面积

我们可以在高速公路上找到一点p,只考虑上半个平面(下半个是一样的),使得 从 now 到 p,然后在从 p 沿着高速公路向上走到达一个最远距离,可以用三分得到这个点
而且此时 now -> p的时间会小于等于 now -> O + O ->p 证明如下:
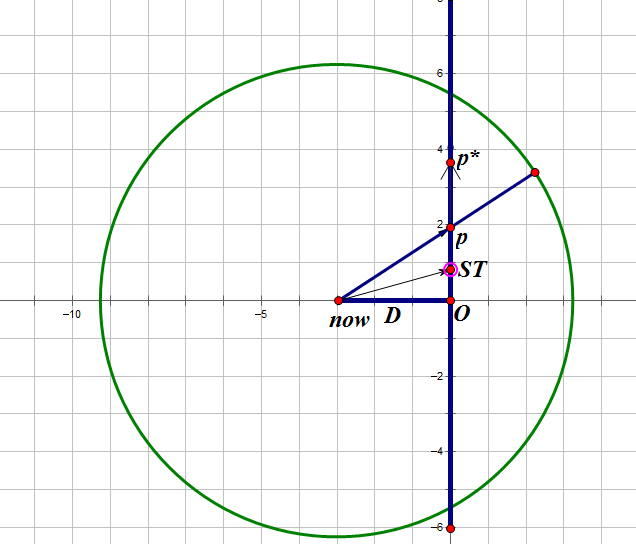
因为肯定存在一点ST,使得 now->ST 的时间等于 now->O + O->ST
假设 p点在ST的上面,now->p 的时间会大于 now-ST + ST->p 的时间,所以走now - >ST +ST->p 的路径会更优,所以 p点一定在 O到ST 这段里面

所以在从now 到 O到p 这一段中的点 p1,直接从now->p1所花费的时间会最少,然后在以p1为出发点所能到达的区域就是以 p1为圆心的圆,并且这个圆会与大圆相内切
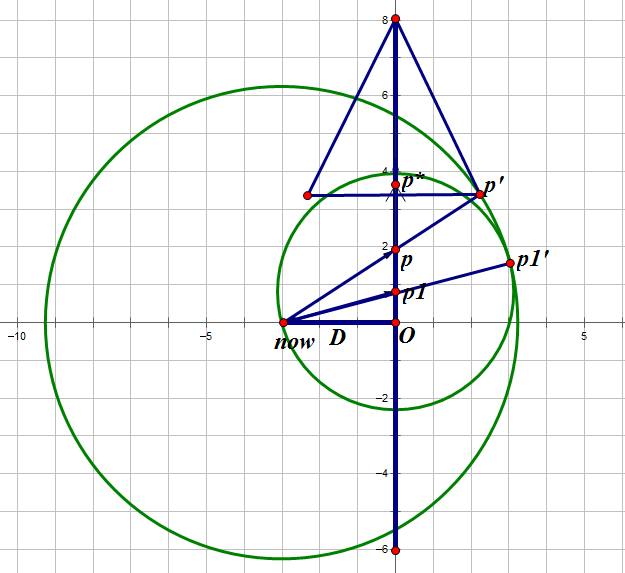
对于p点上面部分的点,以它们为圆心的圆 会形成一个三角形(证明略)
所以我们的答案就是 ans = 大圆面积 + 2*三角形面积 - 2*三角形与圆的面积交
1 //#include<bits/stdc++.h> 2 #include<iostream> 3 #include<cstdio> 4 #include<cmath> 5 #include<cstring> 6 #include<vector> 7 #include<algorithm> 8 using namespace std; 9 typedef long long LL; 10 11 const double PI = acos(-1.0); 12 const double EPS = 1e-7; 13 14 inline int sgn(double x) { 15 return (x > EPS) - (x < -EPS); 16 } 17 18 struct Point { 19 double x, y; 20 Point() {} 21 Point(double x, double y): x(x), y(y) {} 22 void read() { 23 scanf("%lf%lf", &x, &y); 24 } 25 double angle() { 26 return atan2(y, x); 27 } 28 Point operator + (const Point &rhs) const { 29 return Point(x + rhs.x, y + rhs.y); 30 } 31 Point operator - (const Point &rhs) const { 32 return Point(x - rhs.x, y - rhs.y); 33 } 34 Point operator * (double t) const { 35 return Point(x * t, y * t); 36 } 37 Point operator / (double t) const { 38 return Point(x / t, y / t); 39 } 40 double operator *(const Point &b)const 41 { 42 return x*b.x + y*b.y; 43 } 44 double length() const { 45 return sqrt(x * x + y * y); 46 } 47 Point unit() const { //单位向量 48 double l = length(); 49 return Point(x / l, y / l); 50 } 51 }; 52 double cross(Point a,Point b) { 53 return a.x * b.y - a.y * b.x; 54 } 55 double cross(Point a,Point b,Point c){ 56 return (a.x-c.x)*(b.y-c.y)-(a.y-c.y)*(b.x-c.x); 57 } 58 double xml(Point a,Point b,Point c){ 59 return (a.x-c.x)*(b.x-c.x)+(a.y-c.y)*(b.y-c.y); 60 } 61 double sqr(double x) { 62 return x * x; 63 } 64 double dist(const Point &p1, const Point &p2) { 65 return (p1 - p2).length(); 66 } 67 double sdist(Point a,Point b){ 68 return (a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y); 69 } 70 //向量 op 逆时针旋转 angle 71 Point rotate(const Point &p, double angle, const Point &o = Point(0, 0)) { 72 Point t = p - o; 73 double x = t.x * cos(angle) - t.y * sin(angle); 74 double y = t.y * cos(angle) + t.x * sin(angle); 75 return Point(x, y) + o; 76 } 77 Point line_inter(Point A,Point B,Point C,Point D){ //直线相交交点 78 Point ans; 79 double a1=A.y-B.y; 80 double b1=B.x-A.x; 81 double c1=A.x*B.y-B.x*A.y; 82 83 double a2=C.y-D.y; 84 double b2=D.x-C.x; 85 double c2=C.x*D.y-D.x*C.y; 86 87 ans.x=(b1*c2-b2*c1)/(a1*b2-a2*b1); 88 ans.y=(a2*c1-a1*c2)/(a1*b2-a2*b1); 89 return ans; 90 } 91 Point p_to_seg(Point p,Point a,Point b){ //点到线段的最近点 92 Point tmp=p; 93 tmp.x+=a.y-b.y; 94 tmp.y+=b.x-a.x; 95 if(cross(a-p,tmp-p)*cross(b-p,tmp-p)>0) return dist(p,a)<dist(p,b)?a:b; 96 return line_inter(p,tmp,a,b); 97 } 98 void line_circle(Point c,double r,Point a,Point b,Point &p1,Point &p2){ 99 Point tmp=c; 100 double t; 101 tmp.x+=(a.y-b.y);//求垂直于ab的直线 102 tmp.y+=(b.x-a.x); 103 tmp=line_inter(tmp,c,a,b); 104 t=sqrt(sqr(r)-sqr( dist(c,tmp)))/dist(a,b); //比例 105 p1.x=tmp.x+(b.x-a.x)*t; 106 p1.y=tmp.y+(b.y-a.y)*t; 107 p2.x=tmp.x-(b.x-a.x)*t; 108 p2.y=tmp.y-(b.y-a.y)*t; 109 } 110 struct Region { 111 double st, ed; 112 Region() {} 113 Region(double st, double ed): st(st), ed(ed) {} 114 bool operator < (const Region &rhs) const { 115 if(sgn(st - rhs.st)) return st < rhs.st; 116 return ed < rhs.ed; 117 } 118 }; 119 struct Circle { 120 Point c; 121 double r; 122 vector<Region> reg; 123 Circle() {} 124 Circle(Point c, double r): c(c), r(r) {} 125 void read() { 126 c.read(); 127 scanf("%lf", &r); 128 } 129 void add(const Region &r) { 130 reg.push_back(r); 131 } 132 bool contain(const Circle &cir) const { 133 return sgn(dist(cir.c, c) + cir.r - r) <= 0; 134 } 135 bool intersect(const Circle &cir) const { 136 return sgn(dist(cir.c, c) - cir.r - r) < 0; 137 } 138 }; 139 void intersection(const Circle &cir1, const Circle &cir2, Point &p1, Point &p2) { //两圆相交 交点 140 double l = dist(cir1.c, cir2.c); //两圆心的距离 141 double d = (sqr(l) - sqr(cir2.r) + sqr(cir1.r)) / (2 * l); //cir1圆心到交点直线的距离 142 double d2 = sqrt(sqr(cir1.r) - sqr(d)); //交点到 两圆心所在直线的距离 143 Point mid = cir1.c + (cir2.c - cir1.c).unit() * d; 144 Point v = rotate(cir2.c - cir1.c, PI / 2).unit() * d2; 145 p1 = mid + v, p2 = mid - v; 146 } 147 Point calc(const Circle &cir, double angle) { 148 Point p = Point(cir.c.x + cir.r, cir.c.y); 149 return rotate(p, angle, cir.c); 150 } 151 const int MAXN = 1010; 152 Circle cir[MAXN],cir2[MAXN]; 153 bool del[MAXN]; 154 int n; 155 double get_area(Circle* cir,int n) { //多个圆的相交面积 156 double ans = 0; 157 memset(del,0,sizeof(del)); 158 for(int i = 0; i < n; ++i) { 159 for(int j = 0; j < n; ++j) if(!del[j]) { //删除被包含的圆 160 if(i == j) continue; 161 if(cir[j].contain(cir[i])) { 162 del[i] = true; 163 break; 164 } 165 } 166 } 167 for(int i = 0; i < n; ++i) if(!del[i]) { 168 Circle &mc = cir[i]; 169 Point p1, p2; 170 bool flag = false; 171 for(int j = 0; j < n; ++j) if(!del[j]) { 172 if(i == j) continue; 173 if(!mc.intersect(cir[j])) continue; 174 flag = true; 175 intersection(mc, cir[j], p1, p2); //求出两圆的交点 176 double rs = (p2 - mc.c).angle(), rt = (p1 - mc.c).angle(); 177 if(sgn(rs) < 0) rs += 2 * PI; 178 if(sgn(rt) < 0) rt += 2 * PI; 179 if(sgn(rs - rt) > 0) mc.add(Region(rs, PI * 2)), mc.add(Region(0, rt)); //添加相交区域 180 else mc.add(Region(rs, rt)); 181 } 182 if(!flag) { 183 ans += PI * sqr(mc.r); 184 continue; 185 } 186 sort(mc.reg.begin(), mc.reg.end()); //对相交区域进行排序 187 int cnt = 1; 188 for(int j = 1; j < int(mc.reg.size()); ++j) { 189 if(sgn(mc.reg[cnt - 1].ed - mc.reg[j].st) >= 0) { //如果有区域可以合并,则合并 190 mc.reg[cnt - 1].ed = max(mc.reg[cnt - 1].ed, mc.reg[j].ed); 191 } else mc.reg[cnt++] = mc.reg[j]; 192 } 193 mc.add(Region()); 194 mc.reg[cnt] = mc.reg[0]; 195 for(int j = 0; j < cnt; ++j) { 196 p1 = calc(mc, mc.reg[j].ed); 197 p2 = calc(mc, mc.reg[j + 1].st); 198 ans += cross(p1, p2) / 2; // 199 double angle = mc.reg[j + 1].st - mc.reg[j].ed; 200 if(sgn(angle) < 0) angle += 2 * PI; 201 ans += 0.5 * sqr(mc.r) * (angle - sin(angle)); //弧所对应的的面积 202 } 203 } 204 return ans; 205 } 206 double two_cir(Circle t1,Circle t2){ //两个圆的相交面积 207 if(t1.contain(t2)||t2.contain(t1)) return PI * sqr(min(t2.r,t1.r)); 208 if(!t1.intersect(t2)) return 0; 209 double ans=0,len=dist(t1.c,t2.c); 210 double x=(sqr(t1.r)+sqr(len)-sqr(t2.r))/(2*len); 211 double angle1=acos(x/t1.r),angle2=acos((len-x)/t2.r); 212 ans=sqr(t1.r)*angle1+sqr(t2.r)*angle2-len*t1.r*sin(angle1); // 两个扇形 减去一个四边形面积 213 return ans; 214 } 215 double EP=0; 216 double triangle_circle(Point a,Point b,Point c,double r){//三角形与圆交 217 double A,B,C,x,y,tS; 218 A=dist(b,c); 219 B=dist(a,c); 220 C=dist(b,a); 221 if(A<r&&B<r) 222 return cross(a,b,c)/2; 223 else if(A<r&&B>=r){ 224 x=(xml(a,c,b)+sqrt(r*r*C*C-cross(a,c,b)*cross(a,c,b)))/C; 225 tS=cross(a,b,c)/2; 226 return asin(tS*(1-x/C)*2/r/B*(1-EP))*r*r/2+tS*x/C; 227 } 228 else if(A>=r&&B<r){ 229 y=(xml(b,c,a)+sqrt(r*r*C*C-cross(b,c,a)*cross(b,c,a)))/C; 230 tS=cross(a,b,c)/2; 231 return asin(tS*(1-y/C)*2/r/A*(1-EP))*r*r/2+tS*y/C; 232 } 233 else if(fabs(cross(a,b,c))>=r*C||xml(b,c,a)<=0||xml(a,c,b)<=0){ 234 if(xml(a,b,c)<0) 235 if(cross(a,b,c)<0) 236 return (-acos(-1.0)-asin(cross(a,b,c)/A/B*(1-EP)))*r*r/2; 237 else return (acos(-1.0)-asin(cross(a,b,c)/A/B*(1-EP)))*r*r/2; 238 else return asin(cross(a,b,c)/A/B*(1-EP))*r*r/2; 239 } 240 else{ 241 x=(xml(a,c,b)+sqrt(r*r*C*C-cross(a,c,b)*cross(a,c,b)))/C; 242 y=(xml(b,c,a)+sqrt(r*r*C*C-cross(b,c,a)*cross(b,c,a)))/C; 243 tS=cross(a,b,c)/2; 244 return (asin(tS*(1-x/C)*2/r/B*(1-EP))+asin(tS*(1-y/C)*2/r/A*(1-EP)))*r*r/2+tS*((y+x)/C-1); 245 } 246 } 247 Point pt1[5100],cter; 248 double r; 249 Point three_P_mincover(Point a,Point b,Point c){ //三角形的外接圆 250 Point ret; 251 double a1=b.x-a.x,b1=b.y-a.y,c1=(a1*a1+b1*b1)/2; 252 double a2=c.x-a.x,b2=c.y-a.y,c2=(a2*a2+b2*b2)/2; 253 double d=a1*b2-a2*b1; 254 ret.x=a.x+(c1*b2-c2*b1)/d; 255 ret.y=a.y+(a1*c2-a2*c1)/d; 256 return ret; 257 } 258 void min_circle_cover(){ //点的最小覆盖 259 random_shuffle(pt1,pt1+n); 260 cter=pt1[0]; 261 r=0; 262 for(int i=1;i<n;i++){ 263 if(dist(cter,pt1[i])-r>EPS){ 264 cter=pt1[i]; 265 r=0; 266 for(int j=0;j<i;j++){ 267 if(dist(cter,pt1[j])-r>EPS){ 268 cter=(pt1[i]+pt1[j])/2.0; 269 r=dist(cter,pt1[i]); 270 for(int k=0;k<j;k++){ 271 if(dist(cter,pt1[k])-r>EPS){ 272 cter=three_P_mincover(pt1[i],pt1[j],pt1[k]); 273 r=dist(cter,pt1[i]); 274 } 275 } 276 } 277 } 278 } 279 } 280 } 281 int main(){ 282 #ifndef ONLINE_JUDGE 283 freopen("input.txt","r",stdin); 284 #endif // ONLINE_JUDGE 285 double v0,v1,D,T; 286 int cas=0; 287 Point cter; 288 while(scanf("%lf%lf%lf%lf",&v0,&v1,&D,&T)!=EOF){ 289 double p_t,l=D/v0,r=T,mid,mmid; 290 cter=Point(-D,0); 291 if(D>=v0*T){ 292 printf("Case %d: %.8f ",++cas,PI*v0*v0*T*T); 293 continue; 294 } 295 for(int i=0;i<100;i++){ 296 mid=(l+r)/2; 297 mmid=(r+mid)/2; 298 double len1,len2; 299 len1=sqrt(v0*mid*v0*mid-D*D)+v1*(T-mid); 300 len2=sqrt(v0*mmid*v0*mmid-D*D)+v1*(T-mmid); 301 if(len1>len2) r=mmid; 302 else l=mid; 303 } 304 p_t=(l+r)/2; 305 double x1,y1,y; 306 x1=T/p_t*D-D; 307 y1=sqrt(v0*T*v0*T-(x1+D)*(x1+D)); 308 y=sqrt(v0*p_t*v0*p_t-D*D)+v1*(T-p_t); 309 double ans=0,tmp=0; 310 Point a,b,c; 311 a=Point(x1,y1); 312 b=Point(0,y); 313 c=Point(-x1,y1); 314 tmp+=triangle_circle(a,b,cter,v0*T); 315 tmp+=triangle_circle(b,c,cter,v0*T); 316 tmp+=triangle_circle(c,a,cter,v0*T); 317 tmp=fabs(tmp); 318 ans=PI*v0*v0*T*T+cross(a-c,b-c); 319 ans-=tmp*2; 320 printf("Case %d: %.8f ",++cas,ans); 321 } 322 }