我觉得在半双工状态下 485 帧的收发和 总线的收发状态切换延时问题 对485总线长期稳定的工作有很大影响。彻底搞懂这个问题 对了解误码产生、数据丢失、总线的稳定性、可靠性都有重要意义。
以下来源laoguo 21ic的文章 整理后:
1、每一帧收发停止位(或第9位)的延时问题
在RS-485半双工通讯中,一般以单片机的TI,RI信号作收发切换控制信号,发送时,检测TI是否建立起来,当TI为高电平后关闭发送功能转为接收功能,接收时,检测RI是否建立起来,当RI为高电平后,接收完毕,又可以转为发送。因此,必须控制端RE*,DE的信号的有效脉宽应该大于发送或接收一帧信号的宽度。
1
从上面的时序图可知:单片机在串行口发送数据时,只要将8位数据位传送完毕,TI标志即建立,但此时应发送的第九位数据位(若发送地址帧时)和停止位尚未发出。如果在这时关闭发送控制,势必造成发送帧数据不完整。
接收数据时也同样如此,单片机在接收完8个数据位后就建立起RI信号,但此时还未接收到第九位数据位(若接收地址帧时)和停止位。所以,接收端必须延时大于2位数据位的时间(1位数据位时间=1/波特率),再作应答,否则会发生总线冲突。
总之,发送和接收控制信号应该足够宽,以保证完整地接收一帧数据,任意两个单机的发送控制信号在时间上完全分开,避免总线争端。
注:延时T秒的取值
(1) 传送地址帧时,T>2X(1/波特率),可以选取T=2.5X(1/波特率)。
(2) 传送数据帧时,T>1X(1/波特率),可以选取T=1.5X(1/波特率)。
实际的软件流程:
1
问题:(【5楼】以解决)
可看到软件流程并没有在 每一帧收发停止位(或第9位)后实现延时,而是在(数据包的)最后一个字节(帧)上延时。这样能保障数据帧的正确(完整性)和稳定性吗?
2、半双工总线收发切换延时问题
为了可靠的工作,在485总线状态切换时需要做适当延时,再进行数据的收发。具体的做法是在数据发送状态下,先将控制端置“1”,延时1ms左右的时间,再发送有效的数据,一包数据发送结束后再延时1ms后,将控制端置“0”。这样的处理会使总线在状态切换时,有一个稳定的工作过程。
------------------------------------------------------------------------------------------------------------------------------------------
| 两个自动转换(零延时)电路: http://www.ouravr.com/bbs/bbs_upload19801/files_9/ourdev_230635.jpg 输出1时,485芯片不工作,总线仍然处于接收状态,靠上拉电阻保证差分电路输出1。 1 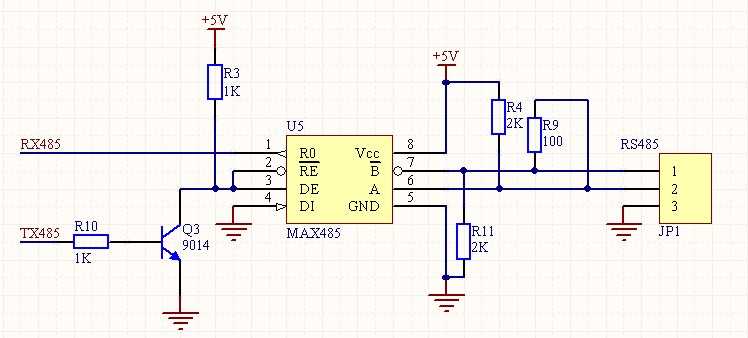 零延时电路图: http://www.ouravr.com/bbs/bbs_upload19801/files_9/ourdev_230999.jpg 1 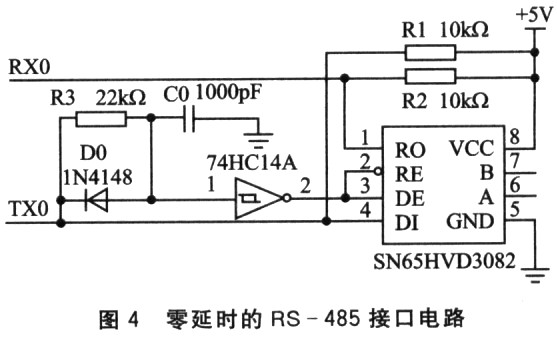 零延时电路波形图: 和上面电路比,输出1时,485芯片也有短时(RC延时)输出。 1  他们如何保证 “控制端RE*,DE的信号的有效脉宽应该大于发送或接收一帧信号的宽度” 的? ------------------------ 这个已经理解了,这两个电路没有使用 单片机来切换,所以不存在发送最后一个帧需要延时的问题。 但是这个问题依然存在: 为了可靠的工作,在485总线状态切换时需要做适当延时,再进行数据的收发。 ------------------------------------ 这两个电路在状态切换时都没有按这个要求来延时。 可看到软件流程并没有在 每一帧收发停止位(或第9位)后实现延时,而是在(数据包的)最后一个字节(帧)上延时。这样能保障数据帧的正确(完整性)和稳定性吗? ------------------------------- 又查了些资料,第一个问题有了新的思路:(具体理解的是否正确,还需要看波形来验证) 对于一个数据包来说,单片机发第一帧(字节)到最后帧之间的数据帧时,单片机都能正确的发出停止位(或第9位),因为这期间没有使用中断里的TI,RI信号作切换。直到最后一个帧才会用TI,RI信号来切换 485。也就是 最后一个帧(字节)才需要延迟 停止位(或第9位)的时间。 从本质上说,在发送/接收 数据包的 最后一个帧(字节)时,需要延时 等待 停止位(或第9位)的完整发送/接收。 也就是应当在 最后一个帧发送/接收后,在软件里写入延时代码 控制485芯片。 |
Maxim带有自动方向控制的半双工RS-485收发器
MAX13487E/MAX13488E半双工RS-485收发器。该系列器件带有AutoDirection功能,发送数据时可自动使能驱动器。这一特性省去了驱动使能控制信号。
----------------------------------------------------------------------------------------------------------------------
今天调了232/485电路,都未延时,开了3小时,每秒发/收一个包(9600bps,8/30字节,不定长),无错误。
用下面两个图 直接把原来的程序(232下的上、下位机)未做任何修改搞成 485了。
上位机用的图:
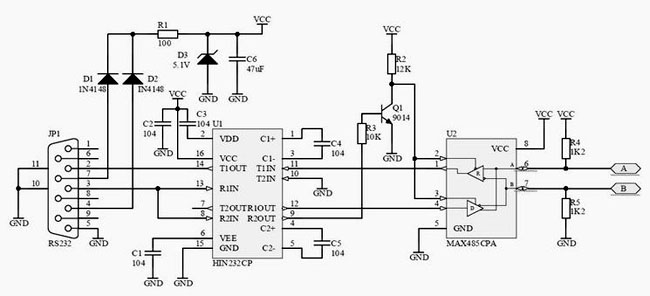
下位机用的图:
----------------------------------------------------------------------------------
半双工总线收发切换延时问题 1ms。有好多帖上说用1ms延时,通讯就稳定了,不用则出现误码。不知究竟为何?
总结下:
1、总线上不间断(长时间连续)的发送数据会产生累积误差(不同晶振频率的误差)。所以用延时(暂停通信一段时间)来消除波特率的误差,避免数据错误。
2、485器件在收、发状态转换时,需要转换时间来过渡到稳定状态。