原创声明:
本原创教程由芯驿电子科技(上海)有限公司(ALINX)创作,版权归本公司所有,如需转载,需授权并注明出处。
适用于板卡型号:
AXU2CGA/AXU2CGB/AXU3EG/AXU4EV-E/AXU4EV-P/AXU5EV-E/AXU5EV-P /AXU9EG/AXU15EG
实验Vivado工程为“rs232_test”。
本章采用AN3485模块的RS232电路实现UART数据传输。
1.模块介绍
AN3845模块专门为工业现场应用设计的RS232/485/422通信模块。它包含一路RS232接口,2路RS485和2路RS422通信接口。配合开发板实现RS232、485和422的数据远程传输和通信。RS232、485和422接口分别采用MAX3232、MAX3485和MAX3490芯片作为电平转换芯片。模块留有一个40针的排母用于连接开发板,RS232接口为一个标准的DB9串口公座,通过串口线直接连接电脑或者其他设备; RS485和RS422接口采用接线端子跟外部连接,超远距离传输可达上千米,另外RS485和RS422接口部分带有正负15KV的ESD防护功能。
AN3845模块实物照片如下:
 AN3845通信模块正面图
AN3845通信模块正面图
1.1 模块参数说明
以下为AN3485通信模块的详细参数:
RS232接口
- 一路标准的DB9公座串行接口;
- 使用MAX3232作为RS232和 TTL电平的转换;
- 传输率高达120Kbps数据通讯速率
RS485接口
- 两路RS485接口,采用3线的接线端子;
- 使用MAX3485作为RS485和TTL的电平转换;
- 工业级设计,抗干扰能力超强,同时采用有效的防雷设计;
- 具有120欧匹配电阻,插上跳线帽即可使能匹配电阻,长距离传输时建议短接。
- 支持多机通讯,允许接在最多128个设备的总线上
- 传输率高达500Kbps数据通讯速率。
RS422接口
- 两路RS422接口,采用5线的接线端子;
- 使用MAX3490作为RS422和TTL的电平转换;
- 工业级设计,抗干扰能力超强,同时采用有效的防雷设计;
- 具有120欧匹配电阻,插上跳线帽即可使能匹配电阻,长距离传输时建议短接。
- 支持多机通讯,允许接在最多128个设备的总线上
- 传输率高达500Kbps数据通讯速率。
1.2 模块功能说明
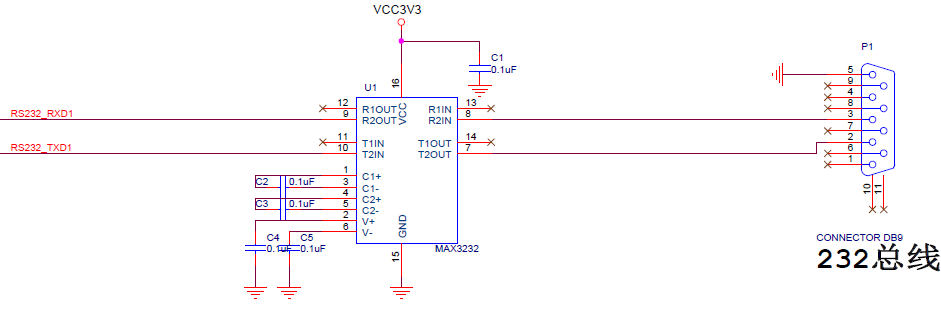
AN3485模块的RS232接口采用MAX3232芯片实现RS232和+3.3V TTL电平的转换。TTL电平的串口接收和发送信号(RXD, TXD)连接到40针的连接器上跟外面的FPGA芯片或者ARM芯片实现串口通信。RS232串口通信的最高速度为120kbps,RS232接口的原理设计图如下图所示。
2. 程序设计
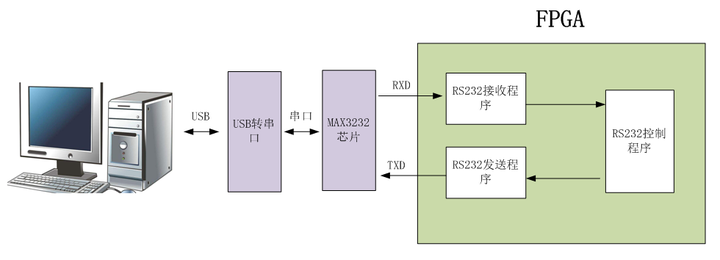
本文所述的串口指异步串行通信,异步串行是指UART(Universal Asynchronous Receiver/Transmitter),通用异步接收/发送。本实验程序设计为每秒钟向串口发送”HELLO ALINX”,如果收到RXD接收的数据,再把接收的数据发送出去,实现回环的功能。
2.1 异步串口通信协议
消息帧从一个低位起始位开始,后面是7个或8个数据位,一个可用的奇偶位和一个或几个高位停止位。接收器发现开始位时它就知道数据准备发送,并尝试与发送器时钟频率同步。如果选择了奇偶校验,UART就在数据位后面加上奇偶位。奇偶位可用来帮助错误校验。在接收过程中,UART从消息帧中去掉起始位和结束位,对进来的字节进行奇偶校验,并将数据字节从串行转换成并行。UART 传输时序如下图所示:
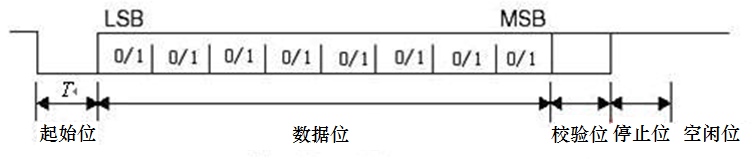
从波形上可以看出起始位是低电平,停止位和空闲位都是高电平,也就是说没有数据传输时是高电平,利用这个特点我们可以准确接收数据,当一个下降沿事件发生时,我们认为将进行一次数据传输。
2.2 波特率
常见的串口通信波特率有2400 、9600、115200等,发送和接收波特率必须保持一致才能正确通信。波特率是指1秒最大传输的数据位数,包括起始位、数据位、校验位、停止位。假如通信波特率设定为9600,那么一个数据位的时间长度是1/9600秒,本实验中的波特率由50MHz时钟产生。
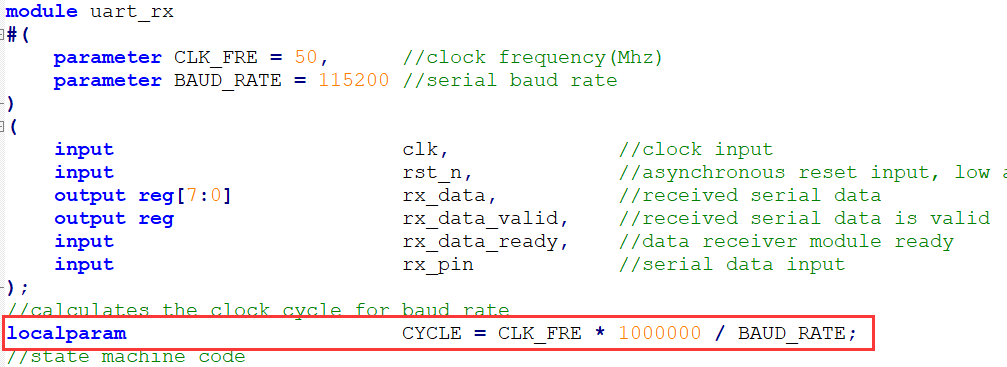
2.3 接收模块设计
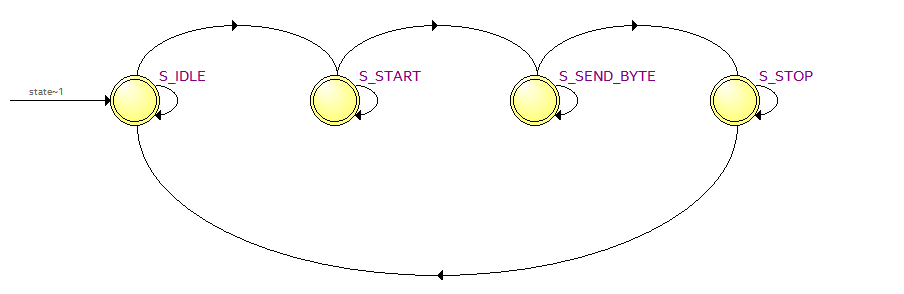
串口接收模块uart_rx是个参数化可配置模块,参数“CLK_FRE”定义接收模块的系统时钟频率,单位是Mhz,参数“BAUD_RATE”是波特率。接收状态机状态转换图如下:
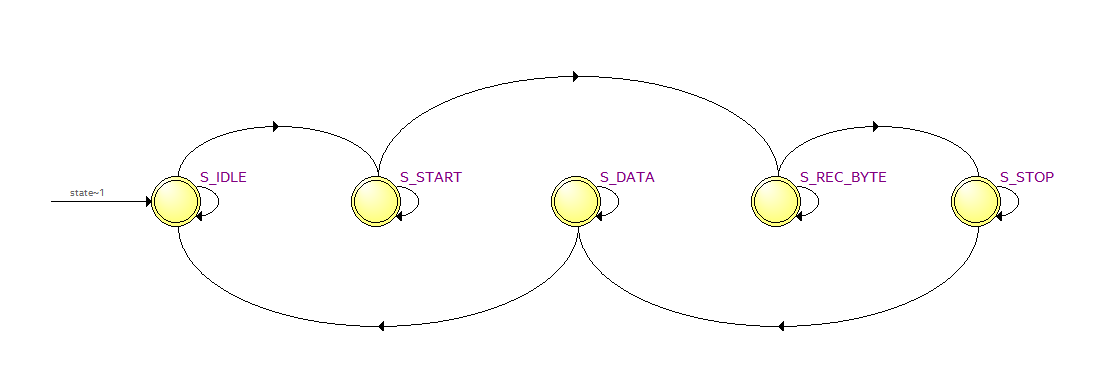
“S_IDLE”状态为空闲状态,上电后进入“S_IDLE”,如果信号“rx_pin”有下降沿,我们认为是串口的起始位,进入状态“S_START”,等一个BIT时间起始位结束后进入数据位接收状态“S_REC_BYTE”,本实验中数据位设计是8位,接收完成以后进入“S_STOP”状态,在“S_STOP”没有等待一个BIT周期,只等待了半个BIT时间,这是因为如果等待了一个周期,有可能会错过下一个数据的起始位判断,最后进入“S_DATA”状态,将接收到的数据送到其他模块。在这个模块我们提一点:为了满足采样定理,在接受数据时每个数据都在波特率计数器的时间中点进行采样,以避免数据出错的情况:
//receive serial data bit data
always@(posedge clk ornegedge rst_n)
begin
if(rst_n ==1'b0)
rx_bits <=8'd0;
elseif(state == S_REC_BYTE && cycle_cnt == CYCLE/2-1)
rx_bits[bit_cnt]<= rx_pin;
else
rx_bits <= rx_bits;
end
注意:本实验没有设计奇偶校验位。
| 信号名称 | 方向 | 宽度(bit) | 说明 |
| clk | in | 1 | 系统时钟 |
| rst_n | in | 1 | 异步复位,低电平复位 |
| rx_data | out | 8 | 接收到的串口数据(8位数据) |
| rx_data_valid | out | 1 | 接收到的串口数据有效(高有效) |
| rx_data_ready | in | 1 | 表示用户可以从接收模块接收数据,当rx_data_ready和rx_data_valid都为高时数据送出 |
| rx_pin | in | 1 | 串口接收数据输入 |
串口接收模块uart_rx端口
2.4 发送模块设计
发送模块uart_tx设计和接收模块相似,也是使用状态机,状态转换图如下:
上电后进入“S_IDLE”空闲状态,如果有发送请求,进入发送起始位状态“S_START”,起始位发送完成后进入发送数据位状态“S_SEND_BYTE”,数据位发送完成后进入发送停止位状态“S_STOP”,停止位发送完成后又进入空闲状态。在数据发送模块中,从顶层模块写入的数据直接传递给寄存器‘tx_reg’,并通过‘tx_reg’寄存器模拟串口传输协议在状态机的条件转换下进行数据传送:
always@(posedge clk ornegedge rst_n)
begin
if(rst_n ==1'b0)
tx_reg <=1'b1;
else
case(state)
S_IDLE,S_STOP:
tx_reg <=1'b1;
S_START:
tx_reg <=1'b0;
S_SEND_BYTE:
tx_reg <= tx_data_latch[bit_cnt];
default:
tx_reg <=1'b1;
endcase
end
| 信号名称 | 方向 | 宽度(bit) | 说明 |
| clk | in | 1 | 系统时钟 |
| rst_n | in | 1 | 异步复位,低电平复位 |
| tx_data | in | 8 | 要发送的串口数据(8位数据) |
| tx_data_valid | in | 1 | 发送的串口数据有效(高有效) |
| tx_data_ready | out | 1 | 发送模块已准备好发送数据,用户可将tx_data_valid信号拉高发送数据给发送模块。当tx_data_ready和tx_data_valid都为高时数据被发送 |
| tx_pin | out | 1 | 串口发送数据发送 |
串口发送模块uart_tx端口
2.5 波特率的产生
在发送和接收模块中,声明了参数CYCLE,也就是UART一个周期的计数值,当然计数是在50MHz时钟下进行的。用户只要设定好CLK_FRE和BAUD_RATE这两个参数即可。
测试程序
测试程序设计FPGA为1秒向串口发送一次“HELLO ALINX ”,不发送期间,如果接受到串口数据,直接把接收到的数据送到发送模块再返回。“ ”,在这里和C语言中表示一致,都是回车换行。
测试程序分别例化了发送模块和接收模块,同时将参数传递进去,波特率设置为115200。
always@(posedge sys_clk ornegedge rst_n)
begin
if(rst_n ==1'b0)
begin
wait_cnt <=32'd0;
tx_data <=8'd0;
state <= IDLE;
tx_cnt <=8'd0;
tx_data_valid <=1'b0;
end
else
case(state)
IDLE:
state <= SEND;
SEND:
begin
wait_cnt <=32'd0;
tx_data <= tx_str;
if(tx_data_valid ==1'b1&& tx_data_ready ==1'b1&& tx_cnt <8'd12)//Send 12 bytes data
begin
tx_cnt <= tx_cnt +8'd1;//Send data counter
end
elseif(tx_data_valid && tx_data_ready)//last byte sent is complete
begin
tx_cnt <=8'd0;
tx_data_valid <=1'b0;
state <= WAIT;
end
elseif(~tx_data_valid)
begin
tx_data_valid <=1'b1;
end
end
WAIT:
begin
wait_cnt <= wait_cnt +32'd1;
if(rx_data_valid ==1'b1)
begin
tx_data_valid <=1'b1;
tx_data <= rx_data;// send uart received data
end
elseif(tx_data_valid && tx_data_ready)
begin
tx_data_valid <=1'b0;
end
elseif(wait_cnt >= CLK_FRE *1000000)// wait for 1 second
state <= SEND;
end
default:
state <= IDLE;
endcase
end
//combinational logic
//Send "HELLO ALINX
"
always@(*)
begin
case(tx_cnt)
8'd0: tx_str <="H";
8'd1: tx_str <="E";
8'd2: tx_str <="L";
8'd3: tx_str <="L";
8'd4: tx_str <="O";
8