一、引子 (超哥协程)
并发本质:保存状态+切换
cpu正在运行一个任务,转而执行另一个任务的情概况:1、是该任务发生了阻塞;2、该任务计算的时间过长或有一个优先级更高的程序替代了它。
协程本质上就是一个线程,使用代码来控制任务的切换。以前线程任务的切换是由操作系统控制的,遇到I/O自动切换,现在我们用协程的目的就是较少操作系统切换的开销(开关线程,创建寄存器、堆栈等,在他们之间进行切换等),在我们自己的程序里面来控制任务的切换。
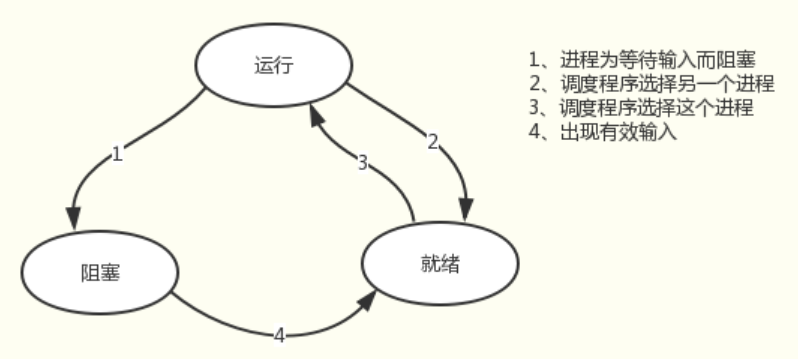
ps:在介绍进程理论时,提及进程的三种执行状态,而线程才是执行单位,所以也可以将上图理解为线程的三种状态
一:其中第二种情况并不能提升效率,只是为了让cpu能够雨露均沾,实现看起来所有任务都被“同时”执行的效果,如果多个任务都是纯计算的,这种切换反而会降低效率。
二、yield 模拟单线程之间的任务切换过程
#1 yiled可以保存状态,yield的状态保存与操作系统的保存线程状态很像,但是yield是代码级别控制的,更轻量级 #2 send可以把一个函数的结果传给另外一个函数,以此实现单线程内程序之间的切换


import time def jishi1hao(): for i in range(6): print("快快来~~~~") yield #yield 可以记录任务的执行状态 time.sleep(1) print("%s号客户2s搞定"%i) def jishi2hao(): g=jishi1hao() #获取到生成器 g.__next__() #执行第一段函数,到第一个yield结束 for i in range(5): time.sleep(1) print("%s号技师正在忙!!!"%i) g.__next__() #继续到下一个yield jishi2hao() #使用yield可以实现程序的切换执行,但是不能提高效率,只是简单的程序分段穿插运行
注意:yield可以实现任务的交替执行,但是不能提高程序的运行效率,反而降低了运行效率(切换过程需要时间)。
#基于yield并发执行,多任务之间来回切换,这就是个简单的协程的体现,但是他能够节省I/O时间吗?不能 import time def consumer(): '''任务1:接收数据,处理数据''' while True: x=yield time.sleep(1) #发现什么?只是进行了切换,但是并没有节省I/O时间 print('处理了数据:',x) def producer(): '''任务2:生产数据''' g=consumer() next(g) #找到了consumer函数的yield位置 for i in range(3): g.send(i) #给yield传值,然后再循环给下一个yield传值,并且多了切换的程序,比直接串行执行还多了一些步骤,导致执行效率反而更低了。 print('发送了数据:',i) start=time.time() #基于yield保存状态,实现两个任务直接来回切换,即并发的效果 #PS:如果每个任务中都加上打印,那么明显地看到两个任务的打印是你一次我一次,即并发执行的. producer() #我在当前线程中只执行了这个函数,但是通过这个函数里面的send切换了另外一个任务 stop=time.time() # 串行执行的方式 s_t=time.time() res=producer() consumer() e_t=time.time() print("yield的时间>>>",stop-start) print("串行的时间>>>",e_t-s_t) #结果显示 #yield的时间>>> 3.0015313625335693 #串行的时间>>> 3.0011236667633057
对于单线程下,我们不可避免程序中出现io操作,但如果我们能在自己的程序中(即用户程序级别,而非操作系统级别)控制单线程下的多个任务能在一个任务遇到io阻塞时就切换到另外一个任务去计算,这样就保证了该线程能够最大限度地处于就绪态,即随时都可以被cpu执行的状态,相当于我们在用户程序级别将自己的io操作最大限度地隐藏起来,从而可以迷惑操作系统,让其看到:该线程好像是一直在计算,io比较少,从而更多的将cpu的执行权限分配给我们的线程。
协程的本质就是在单线程下,由用户自己控制一个任务遇到io阻塞了就切换另外一个任务去执行,以此来提升效率。为了实现它,我们需要找寻一种可以同时满足以下条件的解决方案:
#1、可以检测io操作,在遇到io操作的情况下才发生切换 #2. 可以控制多个任务之间的切换,切换之前将任务的状态保存下来,以便重新运行时,可以基于暂停的位置继续执行。
三、协程介绍
协程:是单线程下的并发,又称微线程,纤程。英文名Coroutine。一句话说明什么是线程:协程是一种用户态的轻量级线程,即协程是由用户程序自己控制调度的。
需要强调的是:
#1. python的线程属于内核级别的,即由操作系统控制调度(如单线程遇到io或执行时间过长就会被迫交出cpu执行权限,切换其他线程运行) #2. 单线程内开启协程,一旦遇到io,就会从应用程序级别(而非操作系统)控制切换,以此来提升效率(!!!非io操作的切换与效率无关)
协程优点:
#1. 协程的切换开销更小,属于程序级别的切换,操作系统完全感知不到,因而更加轻量级 #2. 单线程内就可以实现并发的效果,最大限度地利用cpu
协程缺点
#1. 协程的本质是单线程下,无法利用多核,可以是一个程序开启多个进程,每个进程内开启多个线程,每个线程内开启协程 #2. 协程指的是单个线程,因而一旦协程出现阻塞,将会阻塞整个线程
总结协程特点:
- 必须在只有一个单线程里实现并发
- 修改共享数据不需加锁
- 用户程序里自己保存多个控制流的上下文栈
- 附加:一个协程遇到IO操作自动切换到其它协程(如何实现检测IO,yield、greenlet都无法实现,就用到了gevent模块(select机制)
四、Greenlet
如果我们在单个线程内有20个任务,要想实现在多个任务之间切换,使用yield生成器的方式过于麻烦(需要先得到初始化一次的生成器,然后再调用send。。。非常麻烦),而使用greenlet模块可以非常简单地实现这20个任务直接的切换
#真正的协程模块就是使用greenlet完成的切换 from greenlet import greenlet def eat(name): print('%s eat 1' %name) #2 g2.switch('taibai') #3 print('%s eat 2' %name) #6 g2.switch() #7 def play(name): print('%s play 1' %name) #4 g1.switch() #5 print('%s play 2' %name) #8 g1=greenlet(eat) g2=greenlet(play) g1.switch('taibai')#可以在第一次switch时传入参数,以后都不需要 1
单纯的切换(在没有io的情况下或者没有重复开辟内存空间的操作),反而会降低程序的执行速度。
greenlet只是提供了一种比generator更加便捷的切换方式,当切到一个任务执行时如果遇到io,那就原地阻塞,仍然是没有解决遇到IO自动切换来提升效率的问题。
五、Gevent介绍
Gevent 是一个第三方库,可以轻松通过gevent实现并发同步或异步编程,在gevent中用到的主要模式是Greenlet, 它是以C扩展模块形式接入Python的轻量级协程。 Greenlet全部运行在主程序操作系统进程的内部,但它们被协作式地调度。
#用法 g1=gevent.spawn(func,1,2,3,x=4,y=5)创建一个协程对象g1,spawn括号内第一个参数是函数名,如eat,后面可以有多个参数,可以是位置实参或关键字实参,都是传给函数eat的,spawn是异步提交任务 g2=gevent.spawn(func2) g1.join() #等待g1结束,上面只是创建协程对象,这个join才是去执行 g2.join() #等待g2结束 有人测试的时候会发现,不写第二个join也能执行g2,是的,协程帮你切换执行了,但是你会发现,如果g2里面的任务执行的时间长,但是不写join的话,就不会执行完等到g2剩下的任务了 gevent.joinall([g1,g2]) #等待列表中的所有任务执行完毕 g1.value#拿到func1的返回值
import gevent import time def func1(i): print("func1开始") gevent.sleep(2) print("1111>>>",i) def func2(i): print("func2开始") gevent.sleep(2) print("2222>>>", i) if __name__ == '__main__': s_t=time.time() g1=gevent.spawn(func1,"a") g2=gevent.spawn(func2,"b") g1.join() g2.join() e_t=time.time() print("gevent耗时>>>",e_t-s_t) print("主任务结束")
from gevent import monkey;monkey.patch_all( )必须放在文件开头,表示拾取文件中的所有的I/O操作。
from gevent import monkey;monkey.patch_all() #必须写在最上面,这句话后面的所有阻塞全部能够识别了 import gevent #直接导入即可 import time def eat(): #print() print('eat food 1') time.sleep(2) #加上mokey就能够识别到time模块的sleep了 print('eat food 2') def play(): print('play 1') time.sleep(1) #来回切换,直到一个I/O的时间结束,这里都是我们个gevent做得,不再是控制不了的操作系统了。 print('play 2') g1=gevent.spawn(eat) g2=gevent.spawn(play_phone) gevent.joinall([g1,g2]) print('主')
gevent中的同步与异步效率对比
from gevent import spawn,joinall,monkey;monkey.patch_all() import time def task(pid): """ Some non-deterministic task """ time.sleep(0.5) print('Task %s done' % pid) def synchronous():#同步提交任务,串行,一次出来一个 for i in range(10): task(i) def asynchronous():#异步提交任务 g_l=[spawn(task,i) for i in range(10)] joinall(g_l) if __name__ == '__main__': print('Synchronous:') synchronous() print('Asynchronous:') asynchronous()
六、协程的应用
爬虫
from gevent import monkey;monkey.patch_all() import gevent import requests import time def get_page(url): print('GET: %s' %url) response=requests.get(url) if response.status_code == 200: print('%d bytes received from %s' %(len(response.text),url))
if __name__ == '__main__':
start_time=time.time()
gevent.joinall([
gevent.spawn(get_page,'https://www.zhihu.com/'),
gevent.spawn(get_page,'https://www.yahoo.com/'),
gevent.spawn(get_page,'https://github.com/'),
])
stop_time=time.time()
print('run time is %s' %(stop_time-start_time))
七、I/O模型简介(超哥IO模型)
Stevens在文章中一共比较了五种IO Model:
* blocking IO 阻塞IO
* nonblocking IO 非阻塞IO
* IO multiplexing IO多路复用
* signal driven IO 信号驱动IO(不常见,不讲)
* asynchronous IO 异步IO
再说一下IO发生时涉及的对象和步骤。对于一个network IO (这里我们以read、recv举例),它会涉及到两个系统对象,一个是调用这个IO的process (or thread),另一个就是系统内核(kernel)。当一个read/recv读数据的操作发生时,该操作会经历两个阶段:
#1)等待数据准备 (Waiting for the data to be ready) #2)将数据从内核拷贝到进程中(Copying the data from the kernel to the process)
#1、输入操作:read、readv、recv、recvfrom、recvmsg共5个函数,如果会阻塞状态,则会经历wait data和copy data两个阶段,如果设置为非阻塞则在wait 不到data时抛出异常 #2、输出操作:write、writev、send、sendto、sendmsg共5个函数,在发送缓冲区满了会阻塞在原地,如果设置为非阻塞,则会抛出异常 #3、接收外来链接:accept,与输入操作类似 #4、发起外出链接:connect,与输出操作类似
(1)、阻塞I/O(blocking IO)

上图分析:两个阻塞阶段

当用户进程调用了recvfrom这个系统调用,kernel就开始了IO的第一个阶段:准备数据。对于network io来说,很多时候数据在一开始还没有到达(比如,还没有收到一个完整的UDP包),这个时候kernel就要等待足够的数据到来。
而在用户进程这边,整个进程会被阻塞。当kernel一直等到数据准备好了,它就会将数据从kernel中拷贝到用户内存,然后kernel返回结果,用户进程才解除block的状态,重新运行起来。

(2)非阻塞 IO (设置socket 变成non-blocking)
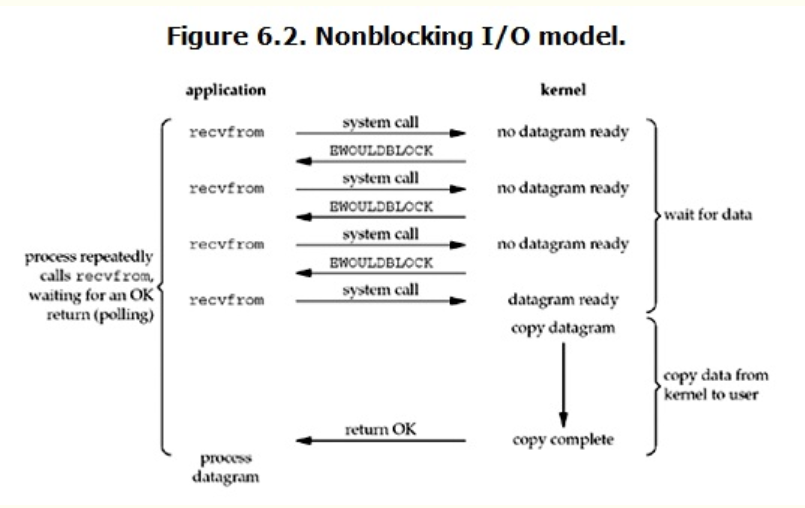
从图中可以看出,当用户进程发出read操作时,如果kernel中的数据还没有准备好,那么它并不会block用户进程,而是立刻返回一个error。从用户进程角度讲 ,它发起一个read操作后,并不需要等待,而是马上就得到了一个结果。用户进程判断结果是一个error时,它就知道数据还没有准备好,于是用户就可以在本次到下次再发起read询问的时间间隔内做其他事情,或者直接再次发送read操作。一旦kernel中的数据准备好了,并且又再次收到了用户进程的system call,那么它马上就将数据拷贝到了用户内存(这一阶段仍然是阻塞的),然后返回。
也就是说非阻塞的recvform系统调用调用之后,进程并没有被阻塞,内核马上返回给进程,如果数据还没准备好,此时会返回一个error。进程在返回之后,可以干点别的事情,然后再发起recvform系统调用。重复上面的过程,循环往复的进行recvform系统调用。这个过程通常被称之为轮询。轮询检查内核数据,直到数据准备好,再拷贝数据到进程,进行数据处理。需要注意,拷贝数据整个过程,进程仍然是属于阻塞的状态。
所以,在非阻塞式IO中,用户进程其实是需要不断的主动询问kernel数据准备好了没有。
# 服务端 import socket import time server=socket.socket() server.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1) server.bind(('127.0.0.1',8083)) server.listen(5) server.setblocking(False) #设置不阻塞 r_list=[] #用来存储所有来请求server端的conn连接 w_list={} #用来存储所有已经有了请求数据的conn的请求数据 while 1: try: conn,addr=server.accept() #不阻塞,会报错 r_list.append(conn) #为了将连接保存起来,不然下次循环的时候,上一次的连接就没有了 except BlockingIOError: # 强调强调强调:!!!非阻塞IO的精髓在于完全没有阻塞!!! # time.sleep(0.5) # 打开该行注释纯属为了方便查看效果 print('在做其他的事情') print('rlist: ',len(r_list)) print('wlist: ',len(w_list)) # 遍历读列表,依次取出套接字读取内容 del_rlist=[] #用来存储删除的conn连接 for conn in r_list: try: data=conn.recv(1024) #不阻塞,会报错 if not data: #当一个客户端暴力关闭的时候,会一直接收b'',别忘了判断一下数据 conn.close() del_rlist.append(conn) continue w_list[conn]=data.upper() except BlockingIOError: # 没有收成功,则继续检索下一个套接字的接收 continue except ConnectionResetError: # 当前套接字出异常,则关闭,然后加入删除列表,等待被清除 conn.close() del_rlist.append(conn) # 遍历写列表,依次取出套接字发送内容 del_wlist=[] for conn,data in w_list.items(): try: conn.send(data) del_wlist.append(conn) except BlockingIOError: continue # 清理无用的套接字,无需再监听它们的IO操作 for conn in del_rlist: r_list.remove(conn) #del_rlist.clear() #清空列表中保存的已经删除的内容 for conn in del_wlist: w_list.pop(conn) #del_wlist.clear() #客户端 import socket import os import time import threading client=socket.socket() client.connect(('127.0.0.1',8083)) while 1: res=('%s hello' %os.getpid()).encode('utf-8') client.send(res) data=client.recv(1024) print(data.decode('utf-8')) ##多线程的客户端请求版本 # def func(): # sk = socket.socket() # sk.connect(('127.0.0.1',9000)) # sk.send(b'hello') # time.sleep(1) # print(sk.recv(1024)) # sk.close() # # for i in range(20): # threading.Thread(target=func).start()
虽然我们上面的代码通过设置非阻塞,规避了IO操作,但是非阻塞IO模型绝不被推荐。
我们不能否定其优点:能够在等待任务完成的时间里干其他活了(包括提交其他任务,也就是 “后台” 可以有多个任务在“”同时“”执行)。
(3)多路复用IO(IO multiplexing) (重点)
多路复用:采用了代理(select)模式,把所有的需要监控的对象传递给selct监控,select监控到了被监控对象有动作,就返回,执行相应的任务。
IO multiplexing这个词可能有点陌生,但是如果我说select/epoll,大概就都能明白了。有些地方也称这种IO方式为事件驱动IO(event driven IO)。我们都知道,select/epoll的好处就在于单个process就可以同时处理多个网络连接的IO。它的基本原理就是select/epoll这个function会不断的轮询所负责的所有socket,当某个socket有数据到达了,就通知用户进程。它的流程如图:


当用户进程调用了select,那么整个进程会被block,而同时,kernel会“监视”所有select负责的socket,当任何一个socket中的数据准备好了,select就会返回。这个时候用户进程再调用read操作,将数据从kernel拷贝到用户进程。
python中的select模块:
import select fd_r_list, fd_w_list, fd_e_list = select.select(rlist, wlist, xlist, [timeout]) 参数: 可接受四个参数(前三个必须) rlist: wait until ready for reading #等待读的对象,你需要监听的需要获取数据的对象列表 wlist: wait until ready for writing #等待写的对象,你需要写一些内容的时候,input等等,也就是说我会循环他看看是否有需要发送的消息,如果有我取出这个对象的消息并发送出去,一般用不到,这里我们也给一个[]。 xlist: wait for an “exceptional condition” #等待异常的对象,一些额外的情况,一般用不到,但是必须传,那么我们就给他一个[]。 timeout: 超时时间 当超时时间 = n(正整数)时,那么如果监听的句柄均无任何变化,则select会阻塞n秒,之后返回三个空列表,如果监听的句柄有变化,则直接执行。 返回值:三个列表与上面的三个参数列表是对应的 select方法用来监视文件描述符(当文件描述符条件不满足时,select会阻塞),当某个文件描述符状态改变后,会返回三个列表 1、当参数1 序列中的fd满足“可读”条件时,则获取发生变化的fd并添加到fd_r_list中 2、当参数2 序列中含有fd时,则将该序列中所有的fd添加到 fd_w_list中 3、当参数3 序列中的fd发生错误时,则将该发生错误的fd添加到 fd_e_list中 4、当超时时间为空,则select会一直阻塞,直到监听的句柄发生变化
结论: select的优势在于可以处理多个连接,不适用于单个连接
#服务端 from socket import * import select server = socket(AF_INET, SOCK_STREAM) server.bind(('127.0.0.1',8093)) server.listen(5) # 设置为非阻塞 server.setblocking(False) # 初始化将服务端socket对象加入监听列表,后面还要动态添加一些conn连接对象,当accept的时候sk就有感应,当recv的时候conn就有动静 rlist=[server,] rdata = {} #存放客户端发送过来的消息 wlist=[] #等待写对象 wdata={} #存放要返回给客户端的消息 print('预备!监听!!!') count = 0 #写着计数用的,为了看实验效果用的,没用 while True: # 开始 select 监听,对rlist中的服务端server进行监听,select函数阻塞进程,直到rlist中的套接字被触发(在此例中,套接字接收到客户端发来的握手信号,从而变得可读,满足select函数的“可读”条件),被触发的(有动静的)套接字(服务器套接字)返回给了rl这个返回值里面; rl,wl,xl=select.select(rlist,wlist,[],0.5) print('%s 次数>>'%(count),wl) count = count + 1 # 对rl进行循环判断是否有客户端连接进来,当有客户端连接进来时select将触发 for sock in rl: # 判断当前触发的是不是socket对象, 当触发的对象是socket对象时,说明有新客户端accept连接进来了 if sock == server: # 接收客户端的连接, 获取客户端对象和客户端地址信息 conn,addr=sock.accept() #把新的客户端连接加入到监听列表中,当客户端的连接有接收消息的时候,select将被触发,会知道这个连接有动静,有消息,那么返回给rl这个返回值列表里面。 rlist.append(conn) else: # 由于客户端连接进来时socket接收客户端连接请求,将客户端连接加入到了监听列表中(rlist),客户端发送消息的时候这个连接将触发 # 所以判断是否是客户端连接对象触发 try: data=sock.recv(1024) #没有数据的时候,我们将这个连接关闭掉,并从监听列表中移除 if not data: sock.close() rlist.remove(sock) continue print("received {0} from client {1}".format(data.decode(), sock)) #将接受到的客户端的消息保存下来 rdata[sock] = data.decode() #将客户端连接对象和这个对象接收到的消息加工成返回消息,并添加到wdata这个字典里面 wdata[sock]=data.upper() #需要给这个客户端回复消息的时候,我们将这个连接添加到wlist写监听列表中 wlist.append(sock) #如果这个连接出错了,客户端暴力断开了(注意,我还没有接收他的消息,或者接收他的消息的过程中出错了) except Exception: #关闭这个连接 sock.close() #在监听列表中将他移除,因为不管什么原因,它毕竟是断开了,没必要再监听它了 rlist.remove(sock) # 如果现在没有客户端请求连接,也没有客户端发送消息时,开始对发送消息列表进行处理,是否需要发送消息 for sock in wl: sock.send(wdata[sock]) wlist.remove(sock) wdata.pop(sock) # #将一次select监听列表中有接收数据的conn对象所接收到的消息打印一下 # for k,v in rdata.items(): # print(k,'发来的消息是:',v) # #清空接收到的消息 # rdata.clear() --------------------------------------- #客户端 from socket import * client=socket(AF_INET,SOCK_STREAM) client.connect(('127.0.0.1',8093)) while True: msg=input('>>: ').strip() if not msg:continue client.send(msg.encode('utf-8')) data=client.recv(1024) print(data.decode('utf-8')) client.close()
select做得事情和第二阶段的阻塞没有关系,就是从内核态将数据拷贝到用户态的阻塞,始终帮你做得监听的工作,帮你节省了一些第一阶段阻塞的时间。
IO多路复用的机制:
select机制: Windows、Linux
poll机制 : Linux #和lselect监听机制一样,但是对监听列表里面的数量没有限制,select默认限制是1024个,但是他们两个都是操作系统轮询每一个被监听的文件描述符(如果数量很大,其实效率不太好),看是否有可读操作。
epoll机制 : Linux #它的监听机制和上面两个不同,他给每一个监听的对象绑定了一个回调函数,你这个对象有消息,那么触发回调函数给用户,用户就进行系统调用来拷贝数据,并不是轮询监听所有的被监听对象,这样的效率高很多。