最新教程下载:http://www.armbbs.cn/forum.php?mod=viewthread&tid=95243
第5章 PHY芯片和STM32的MAC基础知识
本章节为大家讲解STM32自带的MAC和PHY芯片的基础知识,为下一章底层驱动的讲解做一个铺垫。
5.1初学者重要提示
5.2什么是MAC
5.3 MAC地址
5.4 STM32自带MAC基础知识
5.5以太网PHY基础知识
5.6总结
5.1 初学者重要提示
- 学习本章节后,务必学习STM32参考手册中MAC章节的基础知识讲解,非常重要。
- 实际项目中,关于MAC的配置问题,需要大家学习我们论坛网友发的这个帖子。
IEEE MAC地址购买价格及购买方案选择:http://www.armbbs.cn/forum.php?mod=viewthread&tid=28416。
5.2 什么是MAC
媒体访问控制(MAC,Media Access Control),又称作介质访问控制,简称MAC,是局域网中数据链路层的下层部分,提供地址及媒体访问的控制方式,使得不同设备或网络上的节点可以在多点的网络上通信,而不会互相冲突,上述的特性在局域网中格外重要。早期网络发展时以MAC判别各个网络接口的位置,但后来互联网发展后,才有IP的制定与使用。若只是两台设备之间全双工的通信,因为两台设备可以同时发送及接收数据,不会冲突,因此不需要用到MAC协议。
媒体访问控制MAC子层负责解决与媒体接入有关的问题,在物理层的基础上进行无差错的通信。
MAC子层是网络与设备的接口,它从网络层接收数据帧,然后通过媒体访问规则和物理层将数据帧发送到物理链路上。它也从物理层接收数据帧,再送到网络层。总的来说,MAC有三大功能:
- 决定节点何时发送数据包。
- 将数据帧发送到物理层,然后发送到物理链路。
- 从物理层接收数据帧,然后送给网络层处理。
其中最重要的是第一点:决定节点何时发送数据包。对于每一种媒体访问控制技术,用来控制节点发送时机的规则叫做媒体访问规则。局域网上的节点不能想要发送数据就发送,节点只能在轮到它的时候才发送。
5.3 MAC地址
MAC地址,又称为物理地址、硬件地址,用来定义网络设备的位置。在OSI模型中,第三层网络层负责 IP地址,第二层数据链路层则负责 MAC地址。因此一个主机会有一个MAC地址,而每个网络位置会有一个专属于它的IP地址。
MAC地址长度是48bit(6字节),由16进制的数字组成,分为前24位和后24位:
- 前24位叫做组织唯一标志符(Organizationally Unique Identifier,即OUI),是由IEEE的注册管理机构给不同厂家分配的代码,区分了不同的厂家。
- 后24位是由厂家自己分配的,称为扩展标识符。同一个厂家生产的网卡中MAC地址后24位是不同的。
MAC地址的完整数据格式如下(来自wiki百科):
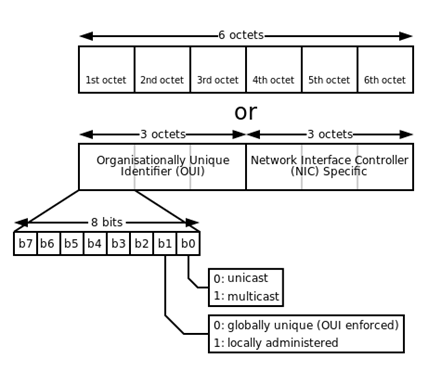
第一个字节的后两位比较重要:
b0 = 0:表示MAC单播地址。
b0 = 1 : 表示MAC组播地址。
b1 = 0:表示OUI分配的全球唯一MAC地址。
b1 = 1:表示用于本地管理的MAC地址。
为了更好地理解,举几个例子:
- 00:xx:xx:xx:xx:xx是MAC单播地址。
- 01:xx:xx:xx:xx:xx是MAC组播地址。
- 01:00:5e:xx:xx:xx是IPv4组播地址。
- ff:ff:ff:ff:ff:ff则作为广播地址。
- 00:50:c2:xx:xx:xx 是意法半导体的MAC地址。
5.4 STM32自带MAC基础知识
关于STM32自带的MAC部分,STM32参考手册中写的晦涩难懂,特别是中文翻译版本,逻辑混乱,如果可以的话,建议大家看英文版。
STM32参考手册中对MAC的讲解主要分为三部分:
- MAC的接口MII和RMII。
参考手册中对这一部分讲解的比较详细,也比较容易理解,建议初学者务必读一读。我们这里就不将其复制粘贴过来了。
- MAC802.3帧格式,帧发送,帧接收等方面的讲解。
这一个部分知识点理解起来比较困难,配合下一章节的底层驱动就好理解了。
- MAC的DMA收发方式控制。
手册中给出了DMA方式的发送和接收的初始化顺序,在下一章节讲解底层驱动的时候结合驱动代码会理解的更好,建议初学者也读一遍。
5.5 以太网PHY基础知识
仅有STM32自带的MAC还不能做网络通信,还需要外接以太网PHY芯片才可以,如同RS485通信一样,仅有一个串口是不行的,还需要外接RS485的PHY芯片。
PHY(Port Physical Layer),可称之为端口物理层,是一个对OSI模型物理层的简称。现在常用于STM32的有DP83848,LAN8270,DM9161/9162等。这些PHY芯片都大同小异,基本寄存器都是一样的,只有扩展寄存和厂商专门设置的寄存器不同。如果用户将其中一个PHY驱动成功了,驱动另一个也是非常方便的,下面是DP83848和DM9161/9162的基本寄存器和扩展寄存器:
/* DP83848C and DM9161 PHY Registers is the same */ #define PHY_REG_BMCR 0x00 /* Basic Mode Control Register */ #define PHY_REG_BMSR 0x01 /* Basic Mode Status Register */ #define PHY_REG_IDR1 0x02 /* PHY Identifier 1 */ #define PHY_REG_IDR2 0x03 /* PHY Identifier 2 */ #define PHY_REG_ANAR 0x04 /* Auto-Negotiation Advertisement */ #define PHY_REG_ANLPAR 0x05 /* Auto-Neg. Link Partner Abitily */ #define PHY_REG_ANER 0x06 /* Auto-Neg. Expansion Register */ #define PHY_REG_ANNPTR 0x07 /* Auto-Neg. Next Page TX .DM9161 NO */ /* Register BMCR bit defination */ #define PHY_FULLD_100M 0x2100 /* Full Duplex 100Mbit */ #define PHY_HALFD_100M 0x2000 /* Half Duplex 100Mbit */ #define PHY_FULLD_10M 0x0100 /* Full Duplex 10Mbit */ #define PHY_HALFD_10M 0x0000 /* Half Duplex 10MBit */ #define PHY_AUTO_NEG 0x1000 /* Select Auto Negotiation */ /* PHY Extended Registers only for DP83848C */ #define PHY_REG_STS 0x10 /* Status Register */ #define PHY_REG_MICR 0x11 /* MII Interrupt Control Register */ #define PHY_REG_MISR 0x12 /* MII Interrupt Status Register */ #define PHY_REG_FCSCR 0x14 /* False Carrier Sense Counter */ #define PHY_REG_RECR 0x15 /* Receive Error Counter */ #define PHY_REG_PCSR 0x16 /* PCS Sublayer Config. and Status */ #define PHY_REG_RBR 0x17 /* RMII and Bypass Register */ #define PHY_REG_LEDCR 0x18 /* LED Direct Control Register */ #define PHY_REG_PHYCR 0x19 /* PHY Control Register */ #define PHY_REG_10BTSCR 0x1A /* 10Base-T Status/Control Register */ #define PHY_REG_CDCTRL1 0x1B /* CD Test Control and BIST Extens. */ #define PHY_REG_EDCR 0x1D /* Energy Detect Control Register */ /* PHY Extended Registers only for DM9161 */ #define PHY_REG_DSCR 0x10 /* Specified Congfiguration Register */ #define PHY_REG_DSCSR 0x11 /* Specified Congfiguration and Status Register */ #define PHY_REG_10BTCSR 0x12 /* 10Base-T Status/Control Register */ #define PHY_REG_PWDOR 0x13 /* Power Down Control Register */ #define PHY_REG_CONGFIG 0x14 /* Specified Congfig Register */ #define PHY_REG_INTERRUPT 0x15 /* Specified interrupt Register */ #define PHY_REG_SRECR 0x16 /* Specified Receive Error Counter */ #define PHY_REG_DISCR 0x17 /* Specified Disconnect Counter Register */ #define PHY_REG_RLSR 0x18 /* Hardware reset latch state Register */ #define PHY_REG_PSCR 0x1D /* Power Saving control register */
对于初学者来说,了解这些知识点就够了,具体如何配置这些寄存器会在下个章节讲解。
5.6 总结
本章节就为大家讲解这么多,主要是为下章节的讲解做个铺垫。学习完毕本章节后,务必将STM32参考手册中MAC章节读一遍。