教程不断更新中:http://www.armbbs.cn/forum.php?mod=viewthread&tid=98429
第39章 emWin6.x指针输入设备(摇杆)
本章节为大家讲解指针输入设备(Pointer Input Devices,简称PID),指针输入设备包括触摸屏、鼠标、游戏摇杆等。触摸屏的控制已经在移植章节进行了讲解,本章我们使用开发板上自带的摇杆来控制光标,让大家对指针输入设备有个全面的认识,以后使用任何其它的输入设备都是一样的。
39.1 初学者重要提示
39.2 指针输入设备介绍
39.3 指针输入设备的API函数
39.4 五项摇杆操作游标
39.5 实验例程说明(RTOS)
39.6 实验例程说明(裸机)
39.7 总结
39.1 初学者重要提示
1、对于初学者来说,本章节比较容易,只需学会函数GUI_PID_StoreState的使用即可,以后操作其它类型的输入设备都是类似的,而且都可以使用这个函数来实现。
2、指针输入设备所有API函数在emWin手册中都有讲解,下图是中文版手册里面API函数的位置
下图是英文版手册里面API函数的位置:
39.2 指针输入设备介绍
指针输入设备指鼠标、触摸屏、游戏操纵杆等设备。单个应用中可以使用多个指针输入设备,以支持鼠标、触摸屏、游戏操纵杆的同时使用。一般情况下,指针输入设备驱动所做的是在检测到事件(比如移动鼠标或者按下触摸屏)时调用函数GUI_PID_StoreState()。窗口管理器负责对PID事件作出正确反应,如果未使用窗口管理器,则由用户应用程序负责对PID事件作出反应。
39.3 指针输入设备的API函数
指针输入设备主要用到下面两个函数,如果用户使用emWin自带的PID驱动,则程序代码中用不到下面两个函数。

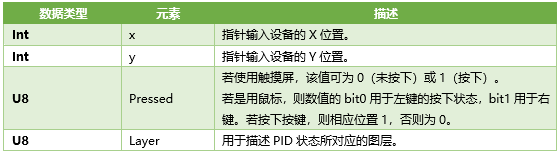
上面两个函数的参数都是GUI_PID_STATE * pState。GUI_PID_STATE结构体的定义如下:
typedef struct { int x, y; U8 Pressed; U8 Layer; } GUI_PID_STATE;
结构体各个成员表示的含义如下:
39.4 五向摇杆操作游标
下面通过一个实例程序来说明指针输入设备API函数的使用方法,这里仅需用到函数GUI_PID_StoreState()。
摇杆任务的程序:
/* ********************************************************************************************************* * 函 数 名: AppTaskUserIF * 功能说明: 按键消息处理 * 形 参: p_arg 是在创建该任务时传递的形参 * 返 回 值: 无 优 先 级: 4 ********************************************************************************************************* */ static void AppTaskUserIF(void *p_arg) { OS_ERR err; uint8_t ucKeyCode; int16_t TimeAcc = 10; /* 动态的加速数值 */ GUI_PID_STATE State; int16_t Max; (void)p_arg; /* 避免编译器报警 */ while (1) { ucKeyCode = bsp_GetKey(); if(ucKeyCode != KEY_NONE) { /* K1键按下 打印任务执行情况 */ if(ucKeyCode == KEY_1_DOWN) { DispTaskInfo(); } /* K2键按下 向消息队列发送数据 */ else if(ucKeyCode == KEY_2_DOWN) { OSSemPost((OS_SEM *)&SEM_SYNCH, (OS_OPT )OS_OPT_POST_1, (OS_ERR *)&err); } /* 获得新的坐标值,每次移动10个像素单位 */ GUI_PID_GetState(&State); /* 按下摇杆左键,向左移动10个像素 */ if (ucKeyCode == JOY_DOWN_L) { State.x -= TimeAcc; } /* 按下摇杆右键,向右移动10个像素 */ if (ucKeyCode == JOY_DOWN_R) { State.x += TimeAcc; } /* 按下摇杆上键,向上移动10个像素 */ if (ucKeyCode == JOY_DOWN_U) { State.y -= TimeAcc; } /* 按下摇杆下键,向下移动10个像素 */ if (ucKeyCode == JOY_DOWN_D) { State.y += TimeAcc; } /* 确定坐标还在屏幕的范围内,如果不在,调整到显示屏范围内 */ if (State.x < 0) { State.x = 0; } if (State.y < 0) { State.y = 0; } Max = LCD_GetXSize() - 1; if (State.x >= Max) { State.x = Max; } Max = LCD_GetYSize() - 1; if (State.y > Max) { State.y = Max; } /* 根据摇杆OK键是否按下,设置按下消息 */ State.Pressed = (ucKeyCode == JOY_DOWN_OK ) ? 1: 0; /* 设置图层为0,因为我们仅使用了图层0,修改后的坐标值也是供图层0使用的 */ State.Layer = 0; /* 存储当前的PID状态到emWin */ GUI_PID_StoreState(&State); } OSTimeDly(20, OS_OPT_TIME_DLY, &err); } }
使用摇杆控制光标要注意以下几个问题
1、光标位置的修改是相对的,要在当前位置的基础之上进行移动,上面的程序中就是先获取光标的当前位置,然后再做修改。
2、 emWin的指针输入设备含有一个 FIFO 缓冲器,默认情况使用函数GUI_PID_StoreState最多可以保存5个PID事件,用户可以在GUIConf.h文件中重新配置宏定义GUI_PID_BUFFER_SIZE来设置。比如设置FIFO为10,就可以定义为
#define GUI_PID_BUFFER_SIZE 10
3、用户只需将新设置的坐标值通过函数GUI_PID_StoreState存入到指针输入设备的FIFO里面,窗口管理器会自动对PID事件作出正确反应(用户只需循环调用函数WM_Exec,GUI_Exec或者GUI_Delay即可),如果未使用窗口管理器,则由用户应用程序负责对PID事件作出反应,即调用函数GUI_PID_GetState来获取存入到指针输入设备FIFO里面的坐标值。
39.5 实验例程说明(RTOS)
配套例子:
V7-552_emWin6.x实验_指针输入设备之摇杆(RTOS)
实验目的:
- 学习emWin使用摇杆操作光标。
- emWin功能的实现在MainTask.c文件里面。
实验内容:
1、K1按键按下,串口或者RTT打印任务执行情况(串口波特率115200,数据位8,奇偶校验位无,停止位1)。
2、摇杆向上按,实现游标向上移动,支持长按。
3、摇杆向下按,实现游标向下移动,支持长按。
4、摇杆向左按,实现游标向左移动,支持长按。
5、摇杆向右按,实现游标向右移动,支持长按。
6、摇杆按下OK键,发送按下消息。
7、(1) 凡是用到printf函数的全部通过函数App_Printf实现。
(2) App_Printf函数做了信号量的互斥操作,解决资源共享问题。
8、默认上电是通过串口打印信息,如果使用RTT打印信息:
MDK AC5,MDK AC6或IAR通过使能bsp.h文件中的宏定义为1即可
#define Enable_RTTViewer 1
9、各个任务实现的功能如下:
App Task Start 任务 :启动任务,这里用作BSP驱动包处理。
App Task MspPro任务 :消息处理,这里用作LED闪烁。
App Task UserIF 任务 :按键消息处理。
App Task COM 任务 :暂未使用。
App Task GUI 任务 :GUI任务。
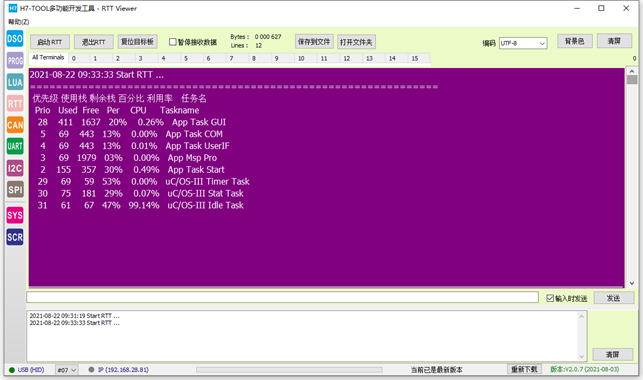
μCOS-III任务调试信息(按K1按键,串口打印):

RTT 打印信息方式:
程序设计:
任务栈大小分配:
μCOS-III任务栈大小在app_cfg.h文件中配置:
#define APP_CFG_TASK_START_STK_SIZE 512u
#define APP_CFG_TASK_MsgPro_STK_SIZE 2048u
#define APP_CFG_TASK_COM_STK_SIZE 512u
#define APP_CFG_TASK_USER_IF_STK_SIZE 512u
#define APP_CFG_TASK_GUI_STK_SIZE 2048u
任务栈大小的单位是4字节,那么每个任务的栈大小如下:
App Task Start 任务 :2048字节。
App Task MspPro任务 :8192字节。
App Task UserIF 任务 :2048字节。
App Task COM 任务 :2048字节。
App Task GUI 任务 :8192字节。
系统栈大小分配:
μCOS-III的系统栈大小在os_cfg_app.h文件中配置:
#define OS_CFG_ISR_STK_SIZE 512u
系统栈大小的单位是4字节,那么这里就是配置系统栈大小为2KB
emWin动态内存配置:
GUIConf.c文件中的配置如下:
#define EX_SRAM 1/*1 used extern sram, 0 used internal sram */ #if EX_SRAM #define GUI_NUMBYTES (1024*1024*24) #else #define GUI_NUMBYTES (100*1024) #endif
通过宏定义来配置使用内部SRAM还是外部的SDRAM做为emWin的动态内存,当配置:
#define EX_SRAM 1 表示使用外部SDRAM作为emWin动态内存,大小24MB。
#define EX_SRAM 0 表示使用内部SRAM作为emWin动态内存,大小100KB。
默认情况下,本教程配套的所有emWin例子都是用外部SDRAM作为emWin动态内存。
emWin界面显示效果:
800*480分辨率界面效果。
39.6 实验例程说明(裸机)
配套例子:
V7-551_emWin6.x实验_指针输入设备之摇杆(裸机)
实验目的:
- 学习emWin使用摇杆操作光标。
- emWin功能的实现在MainTask.c文件里面。
emWin界面显示效果:
800*480分辨率界面效果。
emWin动态内存配置:
GUIConf.c文件中的配置如下:
#define EX_SRAM 1/*1 used extern sram, 0 used internal sram */ #if EX_SRAM #define GUI_NUMBYTES (1024*1024*24) #else #define GUI_NUMBYTES (100*1024) #endif
通过宏定义来配置使用内部SRAM还是外部的SDRAM做为emWin的动态内存,当配置:
#define EX_SRAM 1 表示使用外部SDRAM作为emWin动态内存,大小24MB。
#define EX_SRAM 0 表示使用内部SRAM作为emWin动态内存,大小100KB。
默认情况下,本教程配套的所有emWin例子都是用外部SDRAM作为emWin动态内存。
39.7 总结
指针输入设备方面的知识就为大家讲解这么多,如果大家实际应用中要用到其它类型的指针输入设备,采用本章节讲解的方法即可。