1.通信方式分类
(1)并行通信
发送方和接收方用多根数据线连接,多位数据同时发送。传输线多,长距离传输时成本大。

(2)串行通信
单根数据线发送数据,逐位发送。长距离传送成本低,但控制相对复杂。

串行通信又可分为:异步串行通信和同步串行通信。
异步串行通信:所谓“异步”,指的是双方设备使用各自的时钟,以字符为单位传输,采用一种特殊的格式称为“帧”(如下图),且各字符之间的间隙不等。
一帧数据由起始位,数据位,校验位和停止位构成。
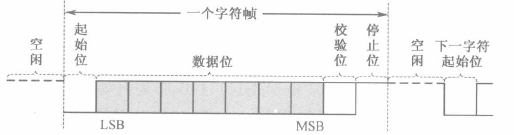
常态下,数据线上为高电平。起始位为低电平,也就是说,起始位出现,表示有一帧数据要传输了。
校验方式有奇偶校验、和校验和循环冗余校验三种方式。
其中“和校验”是指,对数据块求和,产生一个字节的校验数据存到数据块末尾,接收方接受数据时对数据块再求和,和末尾的校验数据比较,不一致就表示传输发生错误。
同步串行通信:双方的时钟严格一致,传送的字符数据间没有间隙,双方实现同步。
2.RS232和TTL电平的转换
RS232是美国电子工业协会于1962年发布的串行通信接口标准,RS即Recomend Standard,推荐标准,232为标示号。RS232用的是负电平逻辑,-3V ~ -15V 为1,+3 ~ +15V为0。
TTL是Transistor-Transistor Logic的简写,晶体管-晶体管逻辑。工作电压5V。规定:
对于输出电路:电压大于等于(≥)2.4V为逻辑1;电压小于等于(≤)0.4V为逻辑0;
对于输入电路:电压大于等于(≥)2.0V为逻辑1;电压小于等于(≤)0.8V为逻辑0;
RS232和TTL接口不仅有工作电压的不同。RS232传输速率低,传输距离不长,采用共地传输产生共模干扰。二者之间需要通过转换芯片转换电平,如MAX232。
MAX232外围电路图:
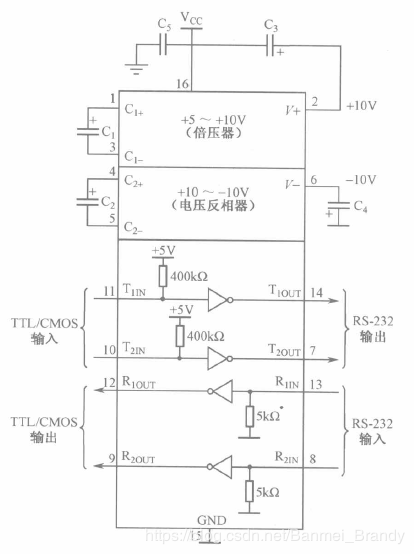
上半部分为电源转换电路,下半部分为发送和接收部分。
注意输入输出要一一对应。从T1in输入就要从T1out输出,从R1in输入就要从R1out输出。
3.波特率
波特率是衡量串行数据传输速率的指标,和比特率一个单位,即每秒传输了多少位,bit per second,bps。
波特率的计算公式:
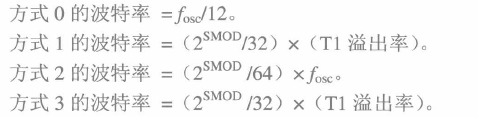
计算定时器装入的初值:
设初值为X,那么定时器就是每计 256-X 个数溢出一次。
首先根据晶振频率计算计一个数需要的时间。
如11.0592MHz,12个时钟周期等于一个机器周期,所以计一个数需要的时间为频率11.0592MHz的倒数再乘上12,即12/11059200(s)。
那么定时器溢出一次的时间就是 12/11059200*(256-X)。作个倒数就是溢出率。
接着根据采用的波特率和选择的工作方式SMOD,代入上面相应的计算公式,就可以计算出初值X了。此时计算出的X为十进制,然后转成16进制。
常用波特率初值表:
为什么51系列单片机的晶振会用11.0592MHz这个神奇的数?
因为如果采用整数如12MHz或6MHz的话,计算出的初值就不是一个整数,导致定时出现累积误差。试来试去,用11.0592MHz能非常准确地计算出定时器的初值。只要是标准的通信速率,算出来的初值都是整的。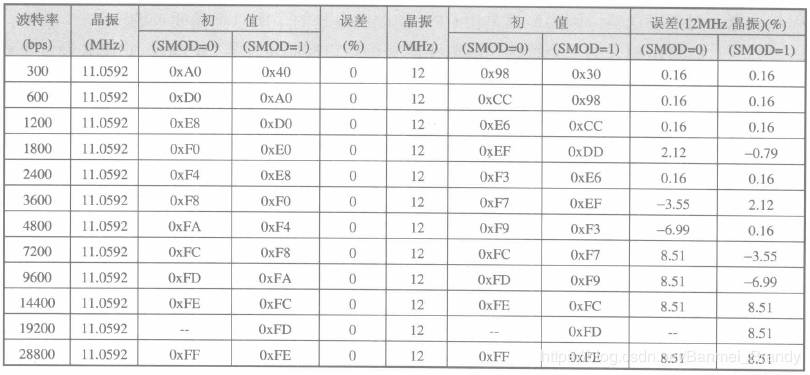
4.通信例程
串口的初始化:
- 设定定时器的工作方式 TMOD = …
- 根据设定的波特率和晶振频率(以及SMOD),计算定时器的初值。
- 启动定时器 TR1 = 1;
- 设定串行口的工作方式 SCON = …
- 串行口开中断 ES = 1,打开总中断EA = 1。
串口中断程序:
- 从SBUF里取数据
- RI清0
- 发送数据
- 判断是否发送完成;TI清0
- (可通过设定标志位来把代码移动到主函数里)
下面是例程的注释,程序实现在上位机上输入字符,下位机(单片机)返回“I get ”+输入的字符。
#include "reg51.h"
typedef unsigned char u8;
typedef unsigned int u16;
u8 flag,r,i; //定义标志位,取数据的变量r和发送字符的变量i
u8 code table[] = "I get ";
void UsartInit()
{
TMOD = 0x20; //设定定时器1为工作方式2,8位自动重装
TH1 = 0xF3; //装入初值(波特率4800,晶振12M,加倍)
TL1 = 0xF3;
PCON = 0x80; //SMOD是TCON的最高位,此处设SMOD为1,1000 0000
TR1 = 1; //启动定时器1
SCON = 0x50; //设置串口为工作方式1,允许接收位REN置1,0101 0000
ES = 1; //串口中断允许
EA = 1; //打开总中断
}
void main()
{
UsartInit(); //串口初始化
while(1) //持续等待中断的出现
{
if(flag == 1) //中断发生且中断程序跑完
{
ES = 0; //把中断允许先关掉,防止下面发送数据时又申请中断
for (i=0;i<6;i++)
{
SBUF = table[i]; //一位一位地发送数据
while(!TI); //判断是否发送完成
TI = 0; //TI在发送数据完成后自动置1,把TI清0
}
SBUF = r; //发送最初接收的数据
while(!TI);
TI = 0; //同上清0
ES = 1; //中断允许重新打开
flag = 0; //标志位清0,等待下次数据的输入
}
}
}
void Usart() interrupt 4
{
r = SBUF; //从SBUF里取接受到的数据
RI = 0; //RI在接收数据完成后自动置1,把RI清0
flag = 1; //标志位置为1
}