Automation Studio是贝加莱公司的控制软件开发平台,软件可运行在贝加莱的基于PC的控制器上,基于Automation Studio我们可构建一个完整的控制软件构建、测试和仿真运行平台。本文以一个简单的例子介绍用Automation Studio进行基于C++的控制软件开发环境搭建和仿真运行。
- 我们的目标:
1)用C++写一个用户程序,该程序被实时控制器的一个实时任务所调用,每100ms执行一次。
2)用组态工具画一个可视化界面,把用户程序中的一些变量和界面上的控件关联起来。
3)把C++程序和可视化界面都下载到具体的硬件中去,并运行。
为达到上述目的,在一个实际项目开发中(以贝加莱系统为例),我们通常需要三个硬件平台:
1)一台装有windows的笔记本,安装好Automation Studio开发软件,工程师用于软件开发。
2)一台安装在现场的实时控制器,装有实时操作系统(Vxworks)。
3)一块安装在现场的触摸屏作为人机界面,实现操作的输入和状态显示。
在教学过程中为每个人都配齐上述硬件成本比较高,我们采用变通的方法,在我们的笔记本电脑上,安装一个ARSim软件,来模拟一个实际的控制器硬件,再安装一个VNC Viewer软件,用来模拟一块触摸屏。它们之间通过TCP/IP通信,因为都在一台电脑上,所以都通过本地IP地址127.0.0.1来访问。
软件安装
Automation Studio软件可到贝加莱官网上进行下载,试用期为30天,本文所用版本为v4.2.1,ARSim仿真软件已包含在内。。
VNC Viewer可采用各种开源软件,比如Real VNC
创建新工程
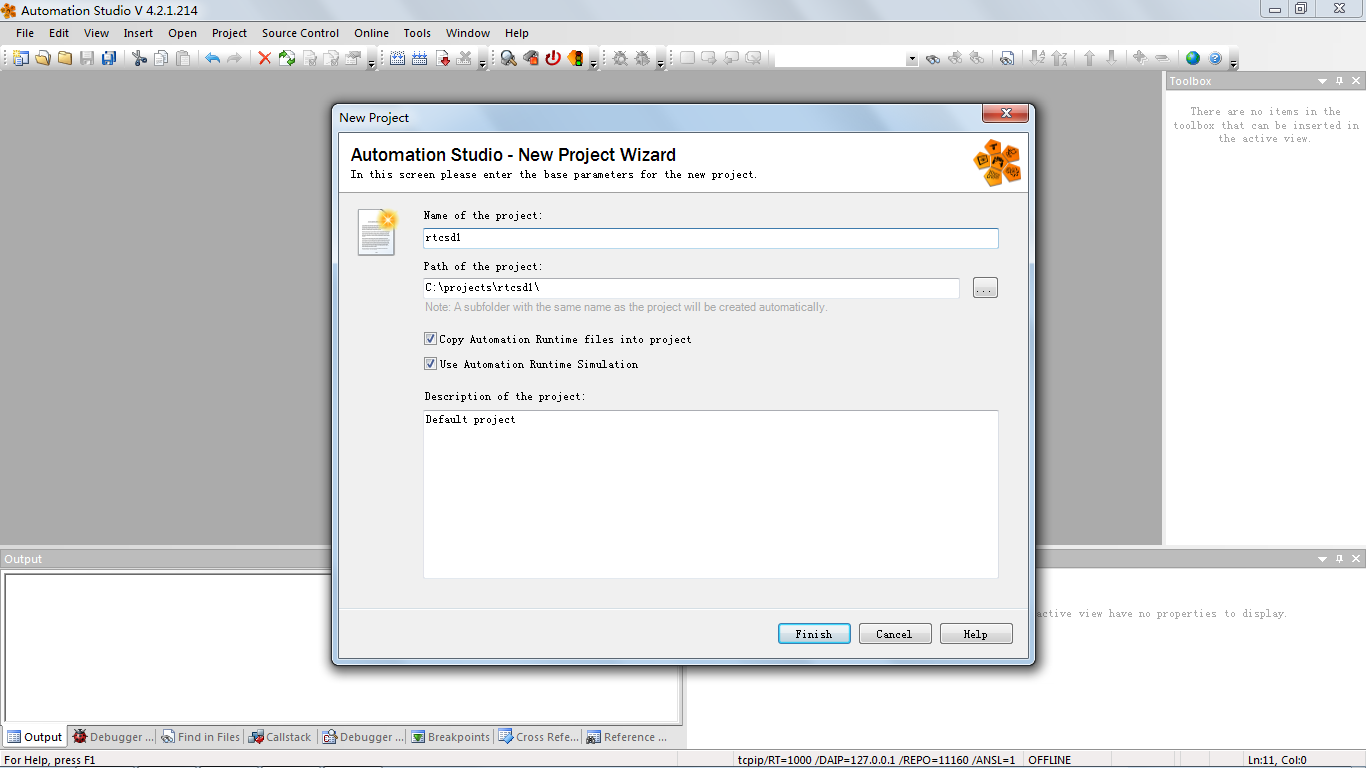
打开Automation Studio,点击File -> New Project,在对话框中选择新工程路径并命名工程名,我们建立一个rtcsd1的新工程,如下图所示。
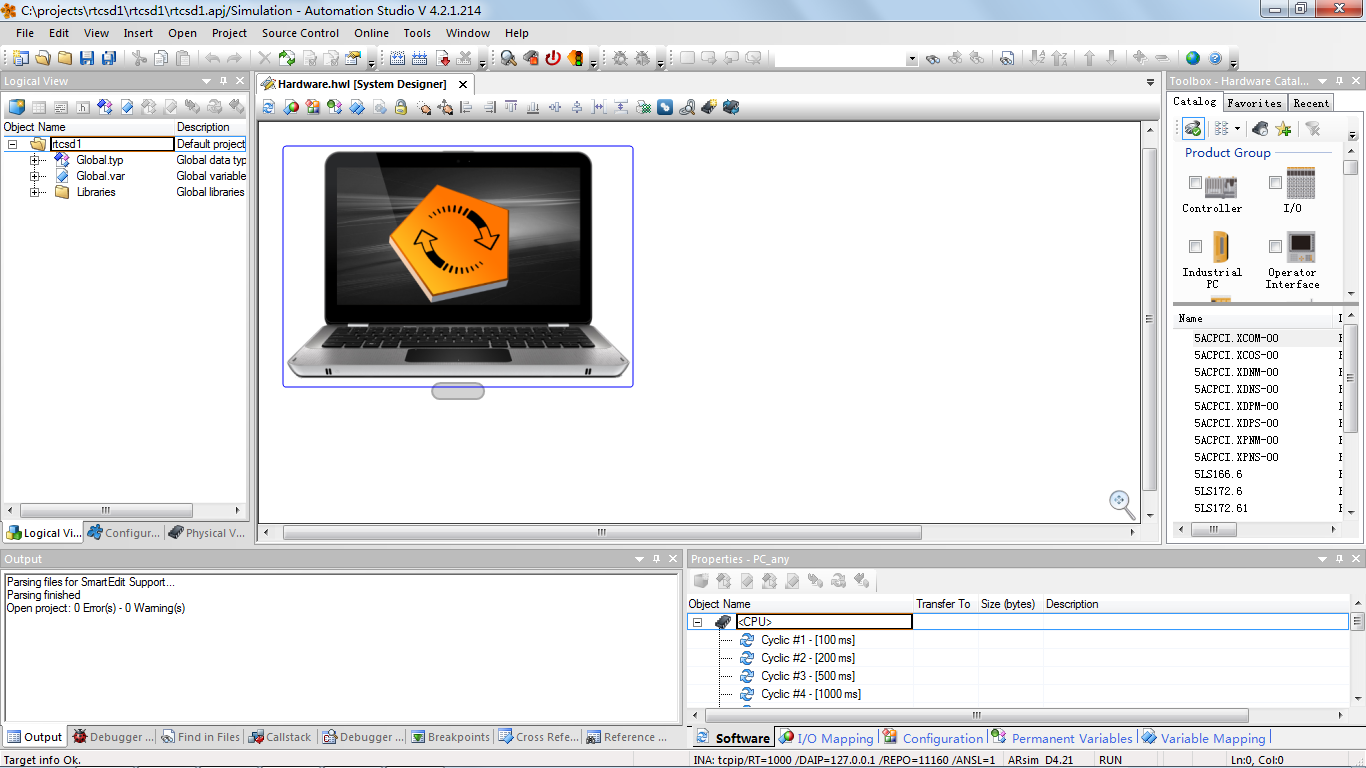
主界面如下图所示
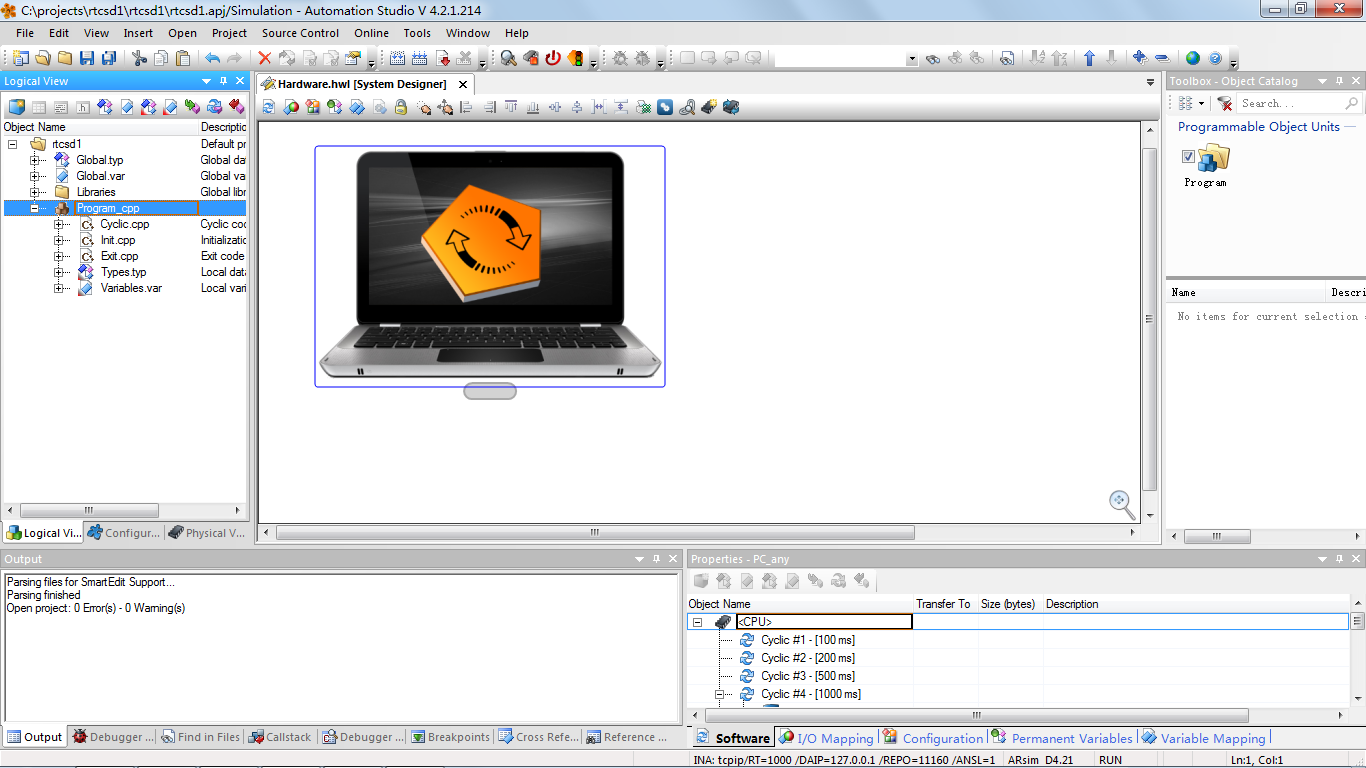
接下来我们要添加一个C++程序,双击右侧的Program图标创建一个C++程序,将程序名修改为Program_cpp,如下图所示
点击Cyclic.cpp,添加自己的代码如下:
#include <bur/plctypes.h>
#ifdef _DEFAULT_INCLUDES
#include <AsDefault.h>
#endif
#include "complex.h"
using namespace std;
unsigned long bur_heap_size = 0xFFFF;
complex c1(20, 10);
complex c2(1,1);
void _CYCLIC ProgramCyclic(void)
{
c1 = c1 + c2;
x = c1.real();
y = c1.imag();
}
这里我们实例化两个Complex复数对象,Complex类是我们之前自己编写的,定义在头文件complex.h里,我们把complex.h文件拷贝到Program_cpp程序的子目录中,并在Cyclic.cpp文件里添加:
#include "complex.h"
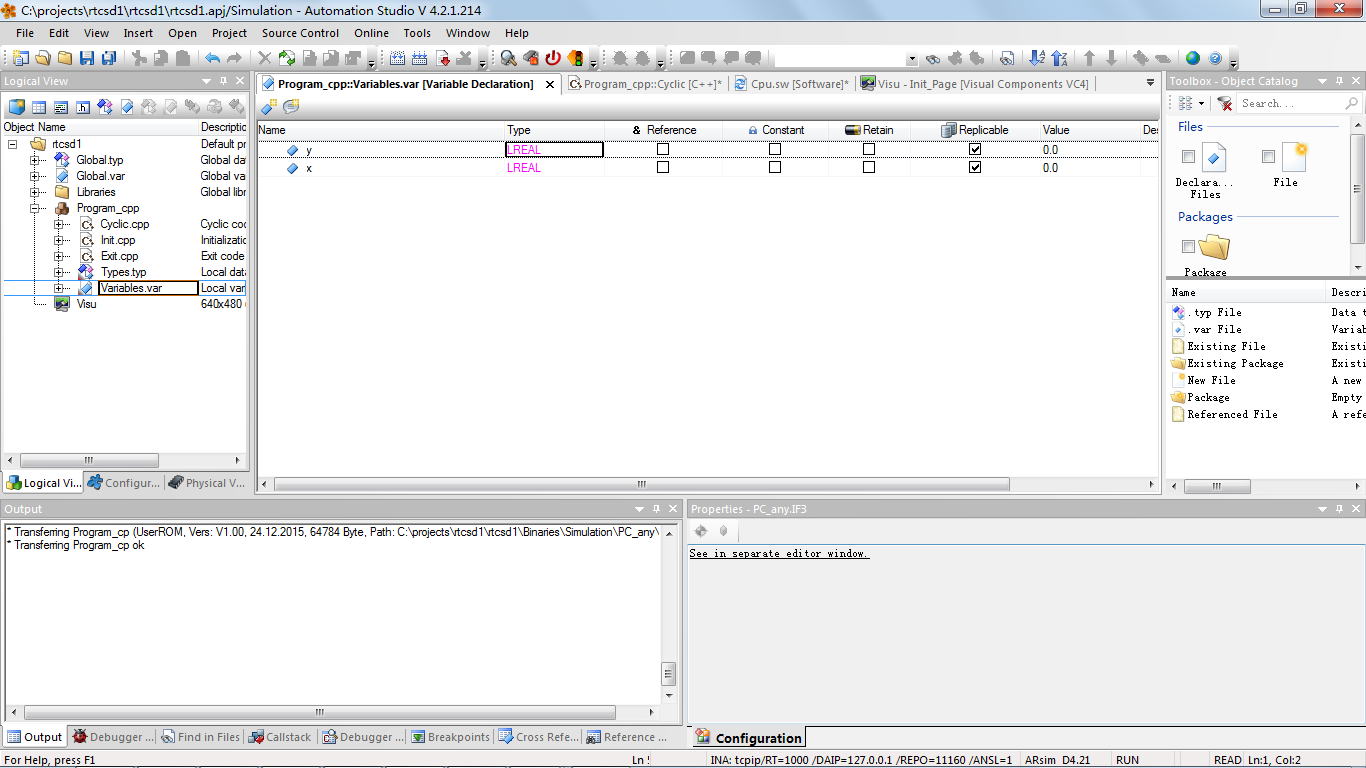
在函数ProgramCyclic()中,我们把复数c1的实部和虚部分别赋给变量x和y,我们把x和y的定义放在单独的变量定义文件Variables.var中,如下图所示:
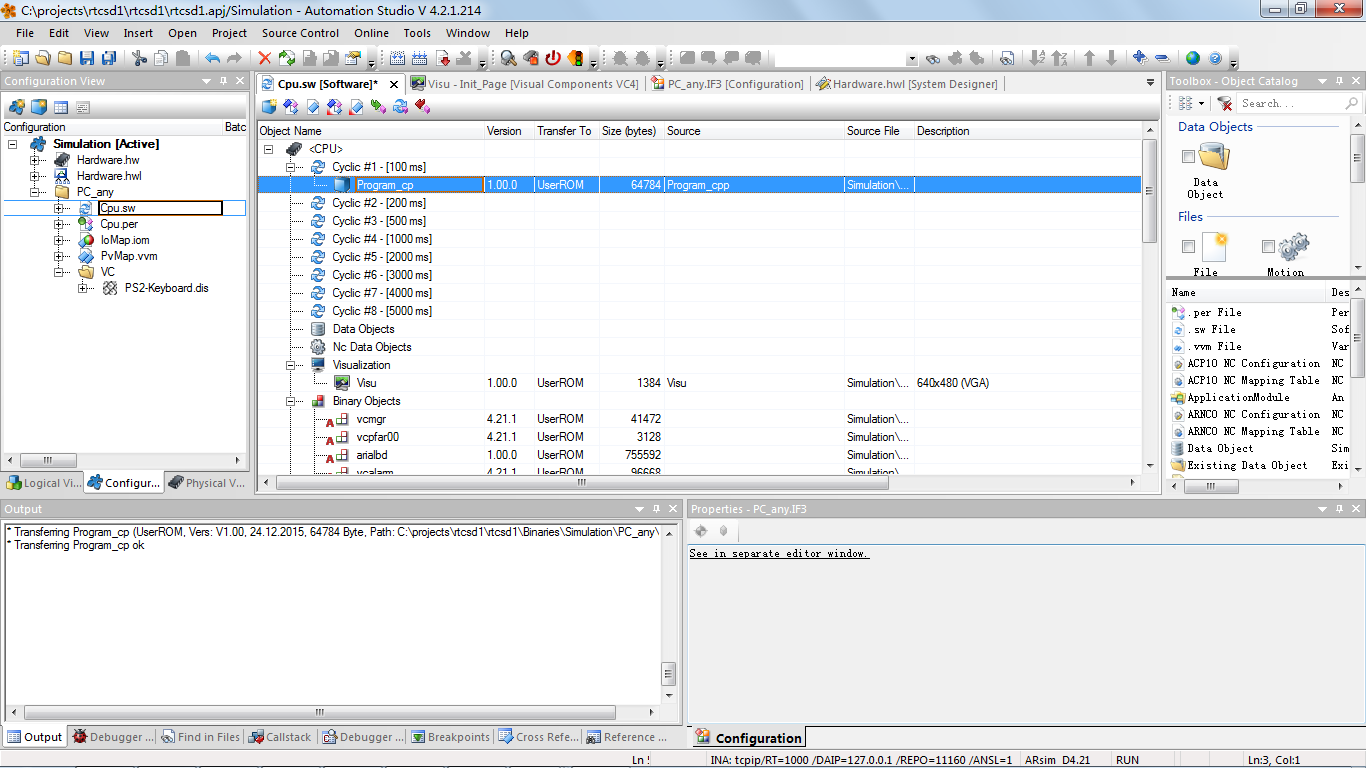
C++程序的编写我们已经完成了,大家注意到,在这段程序里,没有main()函数,这是因为通常我们编写的程序生成二进制文件后,运行时是作为一个独立的进程被操作系统调用的。而在这里,函数ProgramCyclic()前面有一个修饰关键字_CYCLIC,表明这个程序将被控制器实时操作系统的一个周期性实时任务所调用。点击软件左侧工程导航器的Configuration View选项卡,并双击PC_any下的Cpu.sw文件,如下图所示,可以看到实时操作系统有八个周期性任务,我们把VisuProgram_cpp程序放入第一个周期任务,循环周期为100ms。
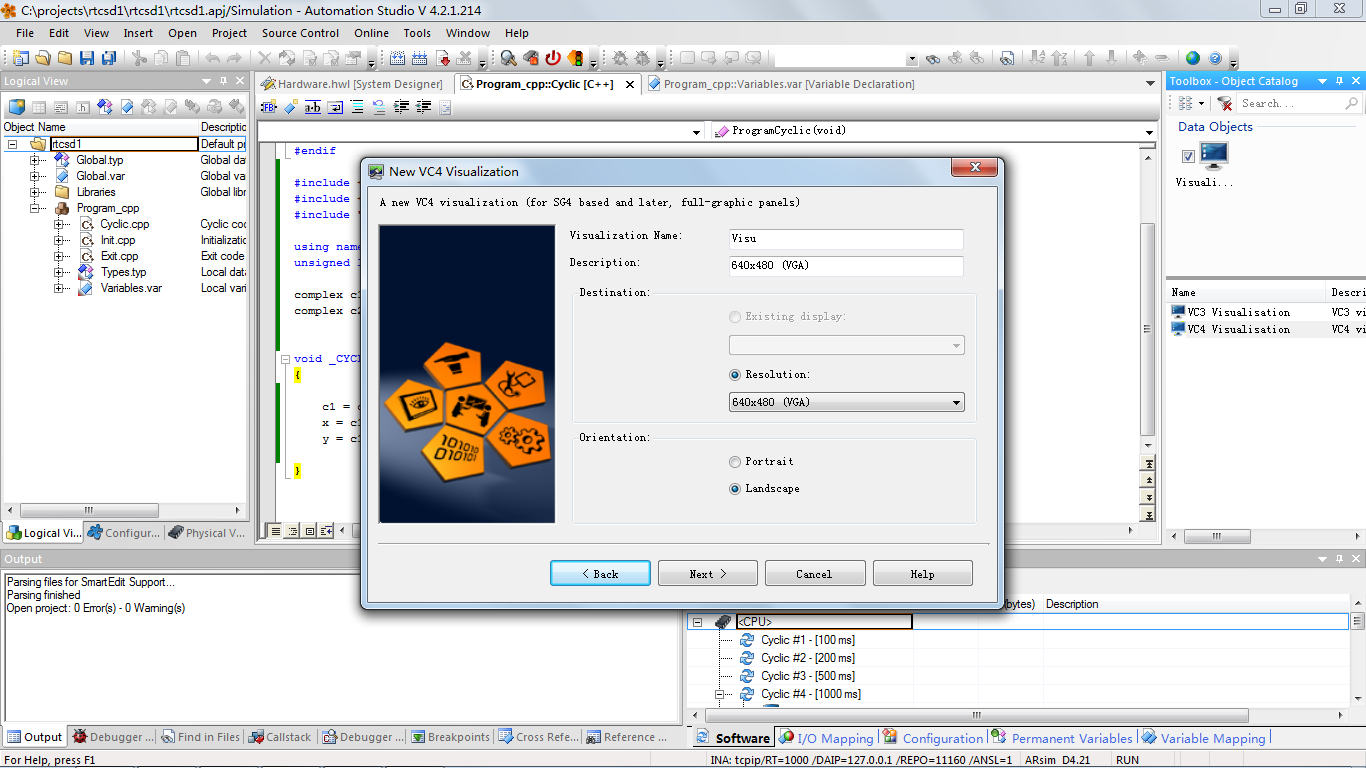
C++程序的编写我们告一段落,下面我们来设计可视化人机界面,首先添加一个可视化对象VC4 Visualisation,命名为Visu
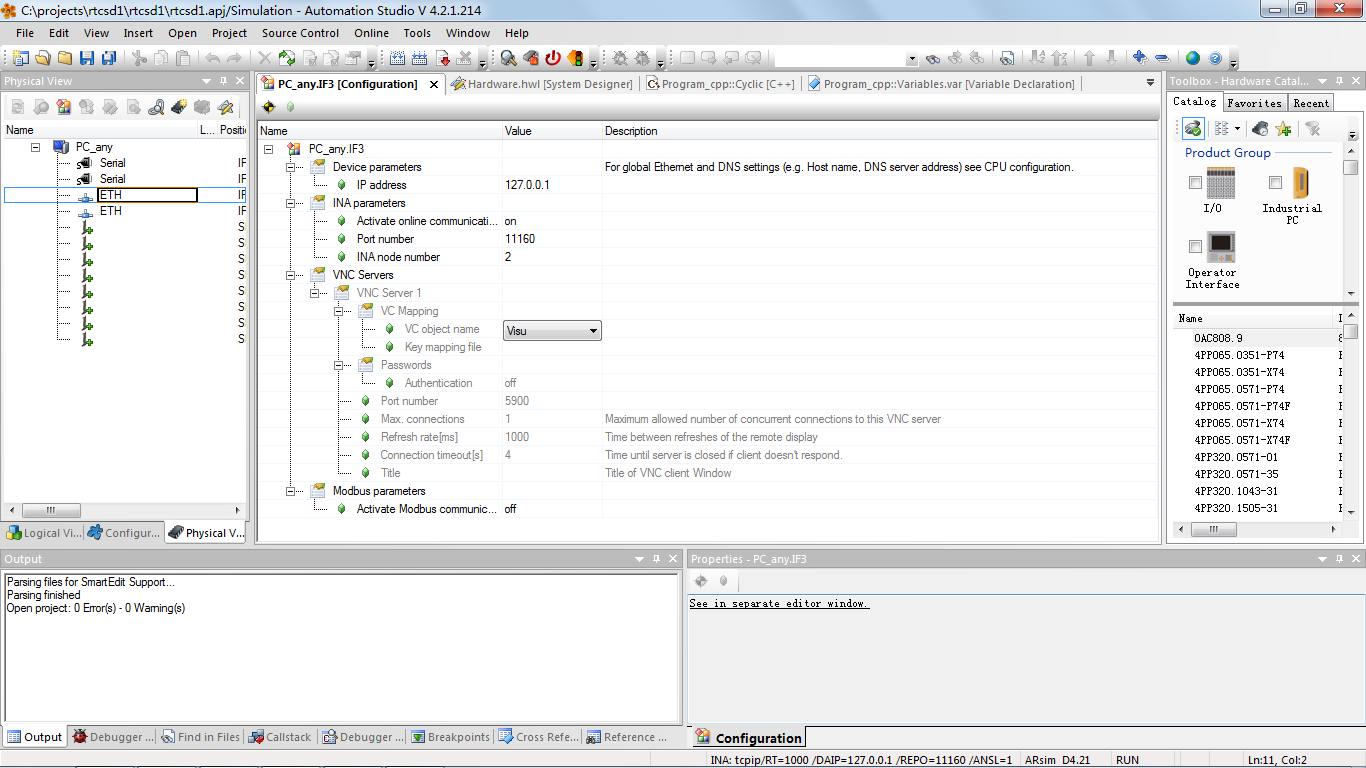
点击软件左侧工程导航器的PhysicalView选项卡,导航器显示的树状结构是我们的仿真控制器硬件ARSim的硬件资源,右键点击第一个网卡ETH,选择Configuration,在弹出的界面中,将Visu对象映射到一个VNC Server中去,如下图所示。
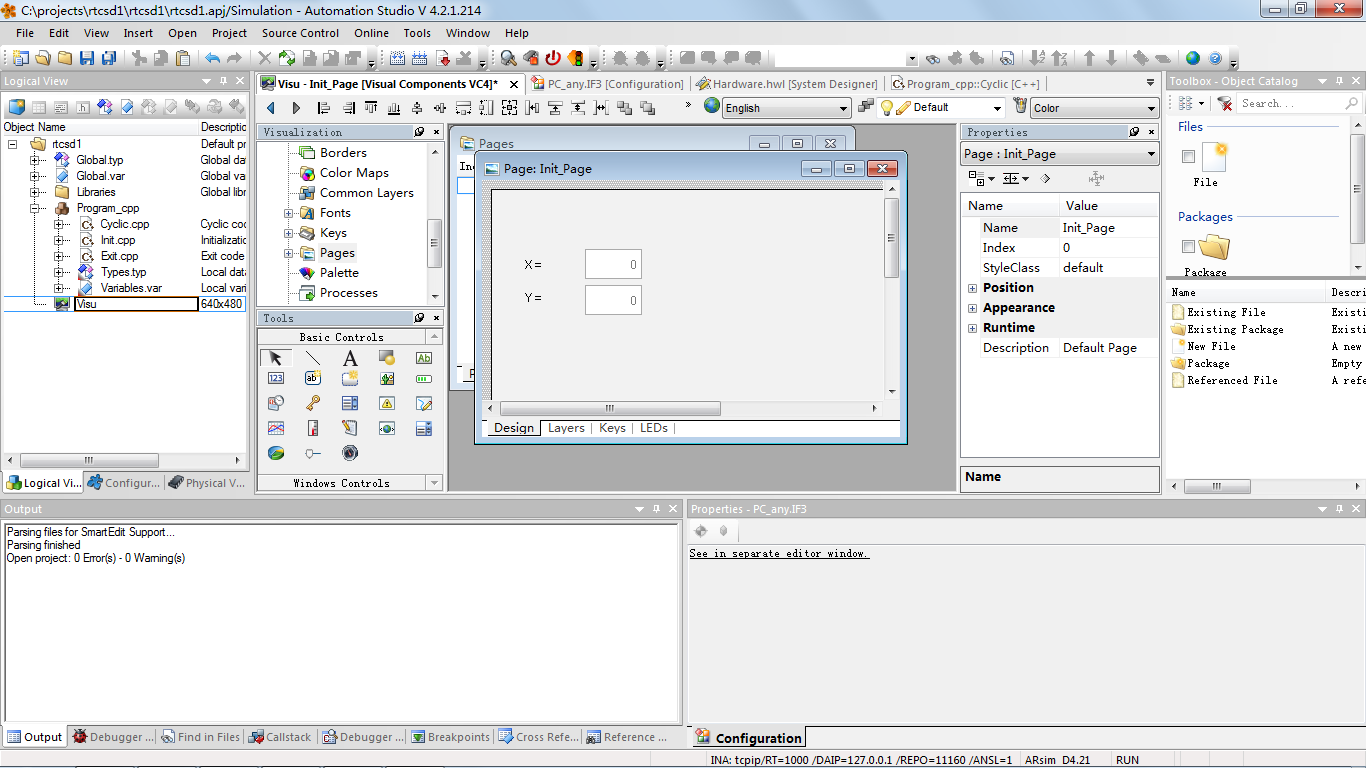
编辑Visu画面,创建4个控件,如下图所示:
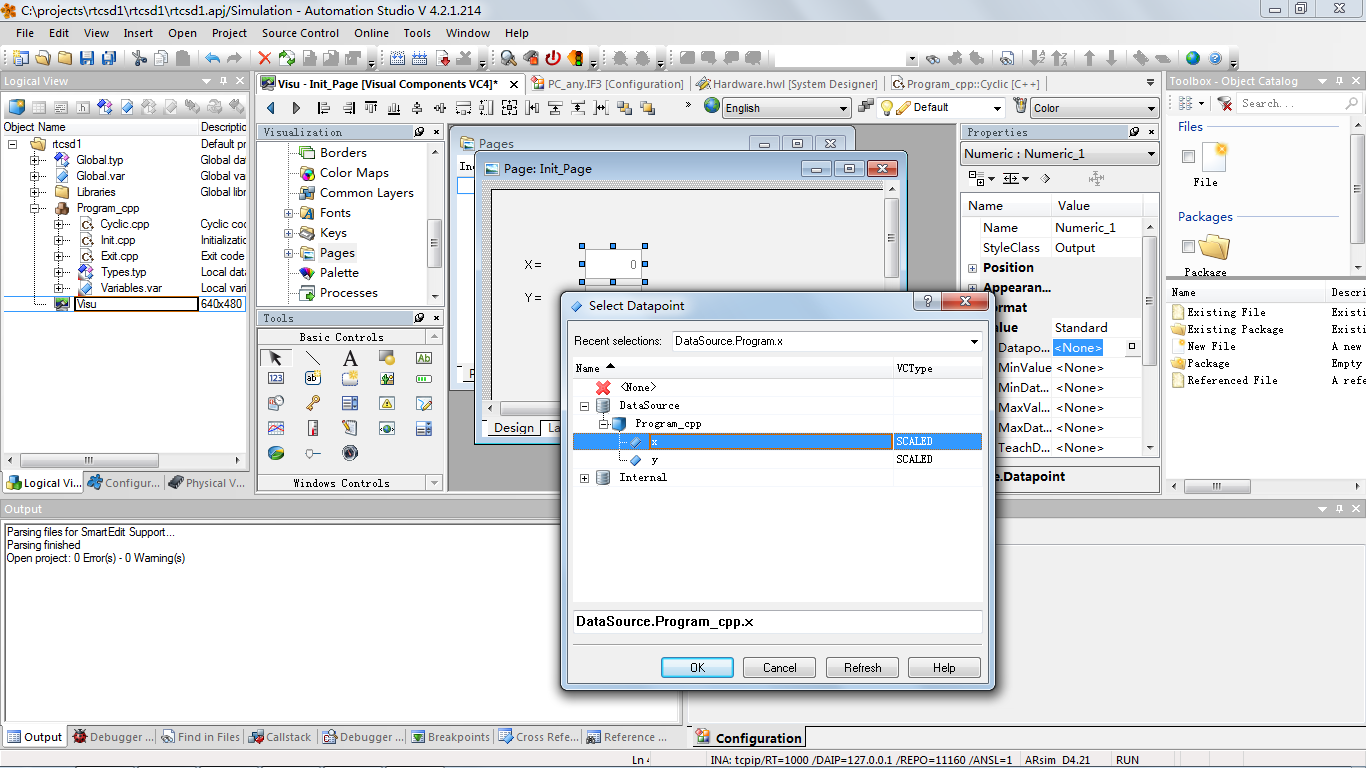
接下来我们把两个显示控件与变量x,y链接起来,如下图所示
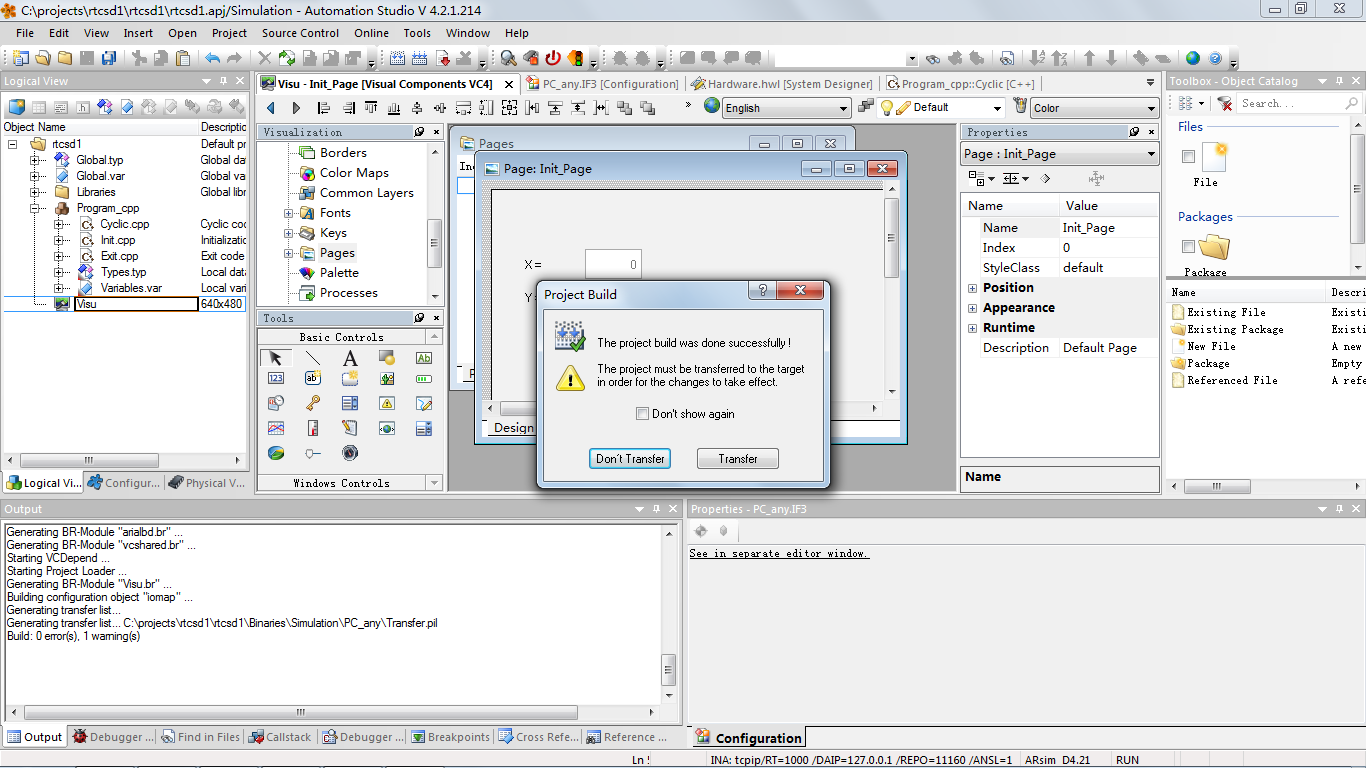
点击菜单Project -> Build Configuration,编译工程,成功后软件询问是否把该工程下载到控制器硬件(这里是仿真控制器ARSim)中去,点击Transfer按钮进行下载,如下图所示。
下载完成后,程序将自动在ARSim中运行,现在我们需要通过VNC Viewer浏览人机界面,双击VNC Viewer,输入本地IP:127.0.0.1,将看到如下的运行画面。
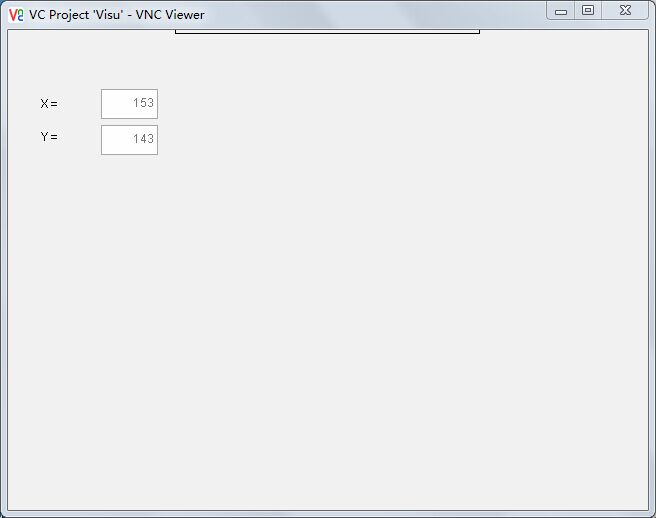
x和y的值实时显示在画面上,并且每个100ms增加1,这个和我们的程序设计和配置是一致的。
更详细的操作介绍,可参见贝加莱文档。当完成上述练习后,就对Automation Studio的基本开发环境有了初步了解,可进一步调用STL、贝加莱提供的功能库以及自定义库来完成C++软件开发。