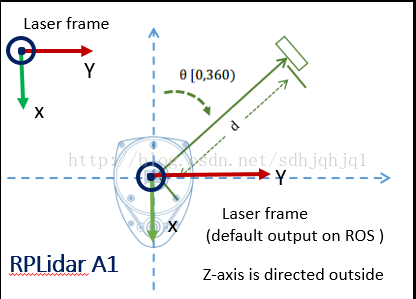
RPLIDAR是低成本的二维雷达解决方案,由SlamTec公司的RoboPeak团队开发,本次学习用的是RPLidar A1型号激光雷达,它能扫描360°,6米半径的范围它适合用于构建地图,SLAM,和建立3D模型,其固定方案如下如:
接下来介绍如何使用这款雷达:
1、安装
建立工作空间并编译(当然也可以使用现有的空间)
mkdir -p ~/turtlebot_ws/src
cd ~/turtlebot_ws/src
git clone https://github.com/ncnynl/rplidar_ros.git
cd ..
catkin_make
source /turtlebot_ws/devel/setup.bash当然也可以使用~/.bashrc设置环境,那么在下次打开终端时就会自动进入该环境
echo “source ~/turtlebot_ws/devel/setup.bash” >> ~/.bashrc配置端口
检查端口权限
ls -l /dev |grep ttyUSB
赋予端口权限
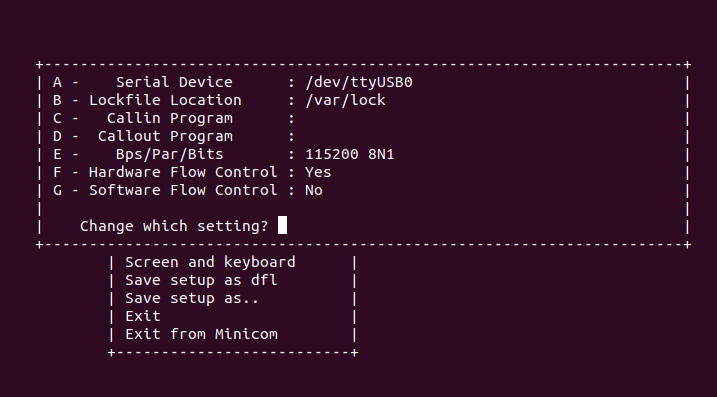
sudo chmod a+rw /dev/ttyUSB0这里可以使用minicom配置端口号、波特率等,可以参考:http://blog.csdn.net/sdhjqhjq1/article/details/79133502
3、运行测试
打开roscore
roscore进入turtlebot_ws运行rplidar和rviz
cd ~/turtlebot_ws
. devel/setup.bash
roslaunch rplidar_ros view_rplidar.launch这时候我们可以看到激光雷达工作了

4、运行脚本建立其他名称
./scripts/create_udev_rules.sh使用别名,在启动的launch文件,修改使用别名
./scripts/create_udev_rules.sh