串口的全程为串行接口,也称为串行通信接口,是采用串行通信方式的扩展接口。与串口对应的并行接口,例如高速AD和DA,
这些都是用的并行接口,而且在编程也简单一些。
串口有一下特点:
(1)通信线路简单,只要一对传输线就可以实现双向通信。
(2)布线简单,成本低。
(3)通信距离长,可以实现数米到数千米的通信距离。
(4)传输速率慢。
常见的串口速率如4800 , 9600 , 115200bps,代表每秒钟发送多少bit数据,例如9600bps就代表1秒内发送9600bit数据。
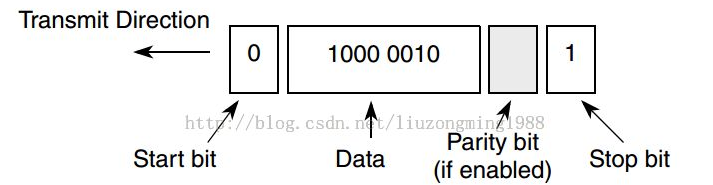
串口协议 : 协议比较简单,一般都是10位数据,1个起始位 低电平 ,然后八个数据位,低位在前,一个奇偶校验位,平时
一般不用,最后是一位停止位高电平,这样一帧数据发送结束。
下面介绍一下我的程序框架:
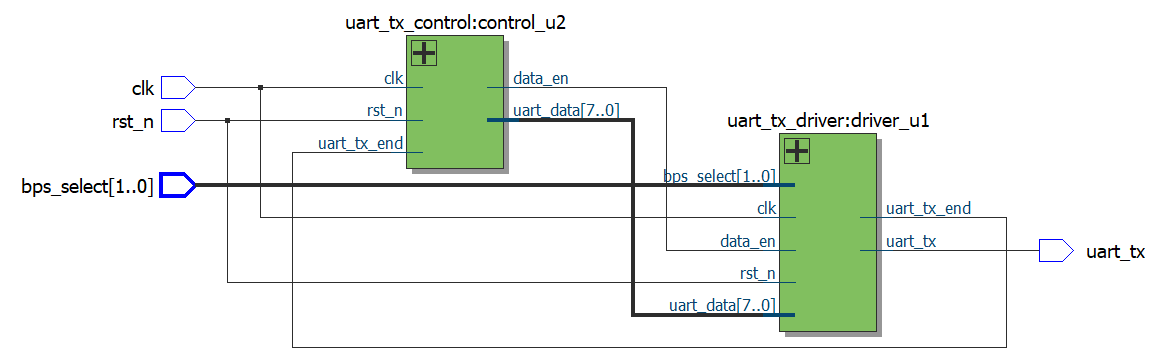
整体框架分为两个部分:一个是串口驱动部分 另一个是串口数据控制部分。串口驱动部分负责串口驱动和波特率的选择,串口数据控制模块
负责控制数据内容的控制和发送速度的控制。

从上面时序图可以看出,每10ms发送一帧数据,这里data_en负责波特率驱动使能,uart_tx_end有两个功能,一个是关闭data_en使能,另一个是给10ms计数器
清零。
/*----------------------------------------------------------------------- Date : 2017-09-03 Description : Design for uart_driver. -----------------------------------------------------------------------*/ module uart_tx_driver ( //global clock input clk , //system clock input rst_n , //sync reset //uart interface output reg uart_tx , //user interface input [1:0] bps_select , //波特率选择 input [7:0] uart_data , input data_en , //发送数据使能 output reg uart_tx_end ); //-------------------------------- //Funtion : 参数定义 parameter BPS_4800 = 14'd10417 , BPS_9600 = 14'd5208 , BPS_115200 = 14'd434 ; reg [13:0] cnt_bps_clk ; reg [13:0] bps ; reg bps_clk_en ; //bps使能时钟 reg [3:0] bps_cnt ; wire [13:0] BPS_CLK_V = bps >> 1 ; //-------------------------------- //Funtion : 波特率选择 always @(posedge clk or negedge rst_n) begin if(!rst_n) bps <= 1'd0; else if(bps_select == 2'd0) bps <= BPS_115200; else if(bps_select == 2'd1) bps <= BPS_9600; else bps <= BPS_4800; end //-------------------------------- //Funtion : 波特率计数 always @(posedge clk or negedge rst_n) begin if(!rst_n) cnt_bps_clk <= 1'd0; else if(cnt_bps_clk >= bps - 1 && data_en == 1'b0) cnt_bps_clk <= 1'd0; else cnt_bps_clk <= cnt_bps_clk + 1'd1; end //-------------------------------- //Funtion : 波特率使能时钟 always @(posedge clk or negedge rst_n) begin if(!rst_n) bps_clk_en <= 1'd0; else if(cnt_bps_clk == BPS_CLK_V - 1) bps_clk_en <= 1'd1; else bps_clk_en <= 1'd0; end //-------------------------------- //Funtion : 波特率帧计数 always @(posedge clk or negedge rst_n) begin if(!rst_n) bps_cnt <= 1'd0; else if(bps_cnt == 11) bps_cnt <= 1'd0; else if(bps_clk_en) bps_cnt <= bps_cnt + 1'd1; end //-------------------------------- //Funtion : uart_tx_end always @(posedge clk or negedge rst_n) begin if(!rst_n) uart_tx_end <= 1'd0; else if(bps_cnt == 11) uart_tx_end <= 1'd1; else uart_tx_end <= 1'd0; end //-------------------------------- //Funtion : 发送数据 always @(posedge clk or negedge rst_n) begin if(!rst_n) uart_tx <= 1'd1; else case(bps_cnt) 4'd0 : uart_tx <= 1'd1; 4'd1 : uart_tx <= 1'd0; //begin 4'd2 : uart_tx <= uart_data[0];//data 4'd3 : uart_tx <= uart_data[1]; 4'd4 : uart_tx <= uart_data[2]; 4'd5 : uart_tx <= uart_data[3]; 4'd6 : uart_tx <= uart_data[4]; 4'd7 : uart_tx <= uart_data[5]; 4'd8 : uart_tx <= uart_data[6]; 4'd9 : uart_tx <= uart_data[7]; 4'd10 : uart_tx <= 1; //stop default : uart_tx <= 1; endcase end endmodule
/*----------------------------------------------------------------------- Date : 2017-XX-XX Description : Design for . -----------------------------------------------------------------------*/ module uart_tx_control ( //global clock input clk , //system clock input rst_n , //sync reset //user interface output reg [7:0] uart_data , output reg data_en , input uart_tx_end ); //-------------------------------- //Funtion : 参数定义 parameter DELAY_10MS = 500_000 ; reg [31:0] cnt_10ms ; wire delay_10ms_done ; //data define reg [31:0] cnt_1s; //-------------------------------- //Funtion : cnt_10ms always @(posedge clk or negedge rst_n) begin if(!rst_n) cnt_10ms <= 1'd0; else if(cnt_10ms == DELAY_10MS - 1 && uart_tx_end == 1'd1) cnt_10ms <= 1'd0; else cnt_10ms <= cnt_10ms + 1'd1; end assign delay_10ms_done = (cnt_10ms == DELAY_10MS - 1) ? 1'd1 : 1'd0; //-------------------------------- //Funtion : data_en always @(posedge clk or negedge rst_n) begin if(!rst_n) data_en <= 1'd0; else if(delay_10ms_done) data_en <= 1'd1; else if(uart_tx_end) data_en <= 1'd0; end ///////////////////////数据测试///////////////////////////// //-------------------------------- //Funtion : cnt_1s always @(posedge clk or negedge rst_n) begin if(!rst_n) cnt_1s <= 1'd0; else if(cnt_1s == 49_999_999) cnt_1s <= 1'd0; else cnt_1s <= cnt_1s + 1'd1; end //-------------------------------- //Funtion : uart_data always @(posedge clk or negedge rst_n) begin if(!rst_n) uart_data <= 1'd0; else if(uart_data >= 10) uart_data <= 1'd0; else if(cnt_1s == 49_999_999) uart_data <= uart_data + 1'd1; end endmodule