
BJROBOT 线速度校正
1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动
roslaunch znjrobot bringup.launch。
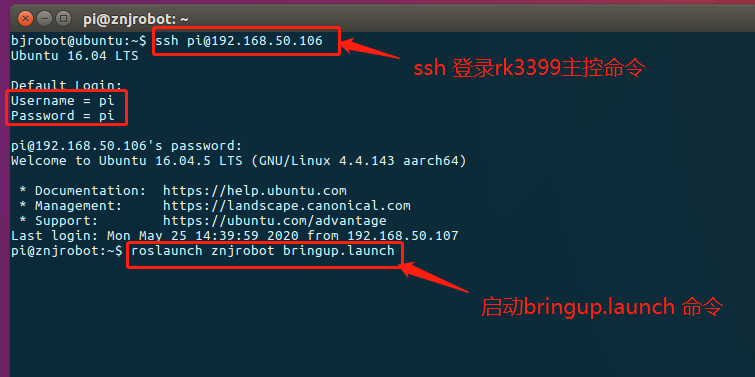
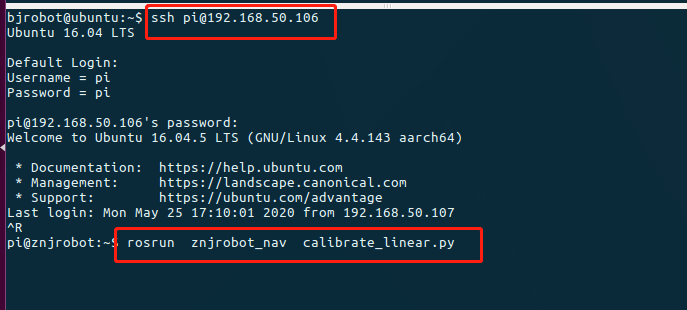
2.在虚拟机端打开一个终端,ssh 过去小车主控端,启动校正线速度命令rosrunznjrobot_nav calibrate_linear.py
3.在虚拟机端再打开一个终端,直接启动 rosrunrqt_reconfigure rqt_reconfigure

4点击 start_test,进行第一次的走一米测试,测量小车走的距离。
假如小车走了 1.1 米,那么线速度的比例系数 linear_scale = 1.1/1=1.1 假如小车走了 0.9 米,那么线速度的比例系数 linear_scale = 0.9/1= 0.9
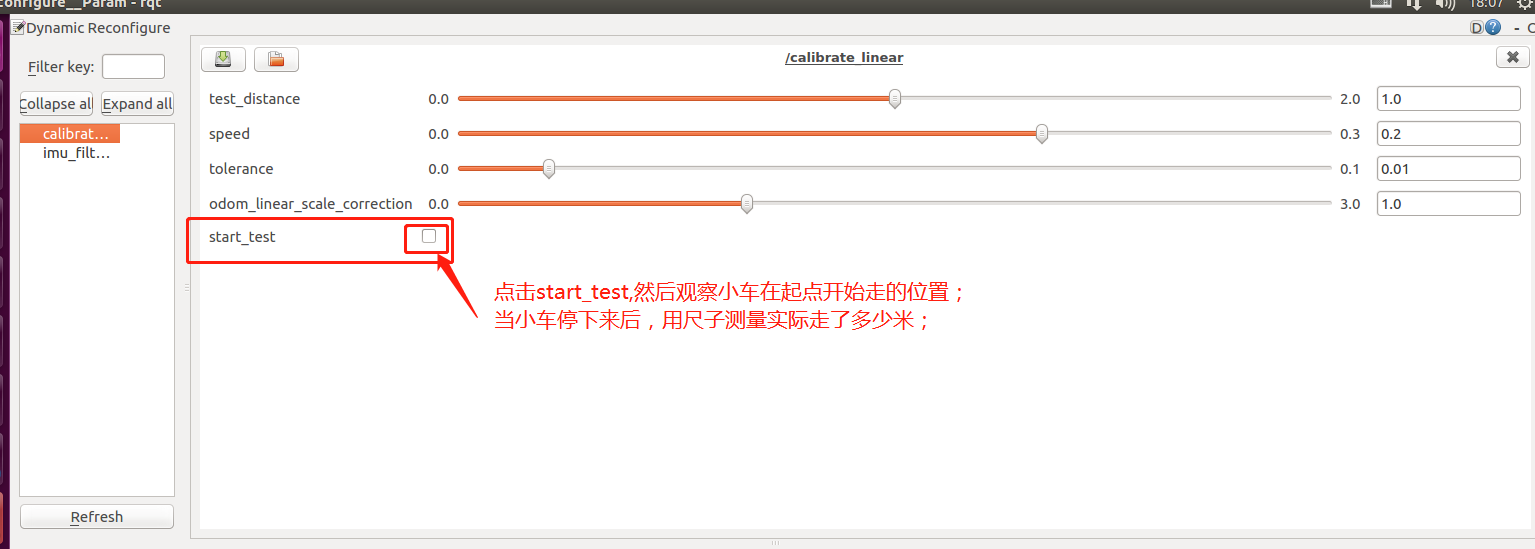
5.然后车放回原来起点位置,把比例系数修改到下图所示位置,再点击 start_test,当小车停下来的时候,再次测量小车是否走了一米,如果接近或者差不多 1 米,那么这个比例系数就是正确的。误差再 1 厘米以内可以接
受。
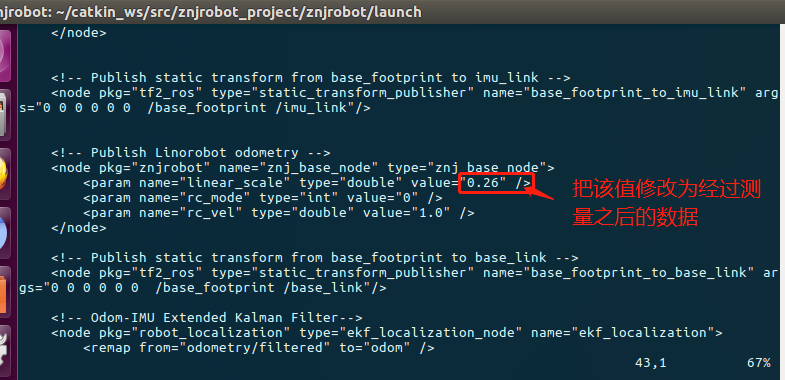
6.在主控端的bringup.launch 文件中把linear_scale 修改成实际计算好的线速度比例系数。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736

