1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch。
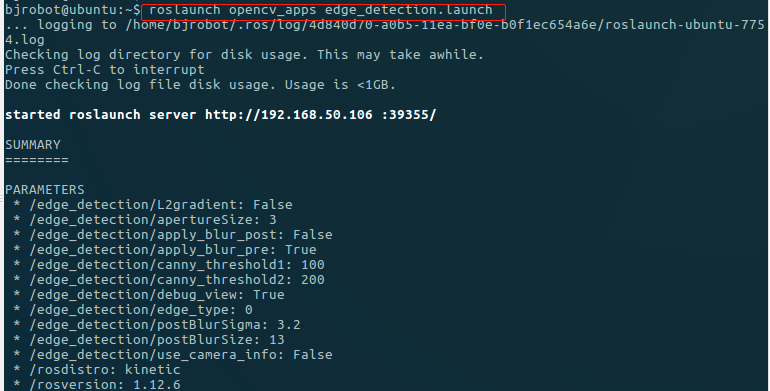
2.在虚拟机端启动 roslaunch opencv_apps edge_detection.launch 进行边缘提取采集。
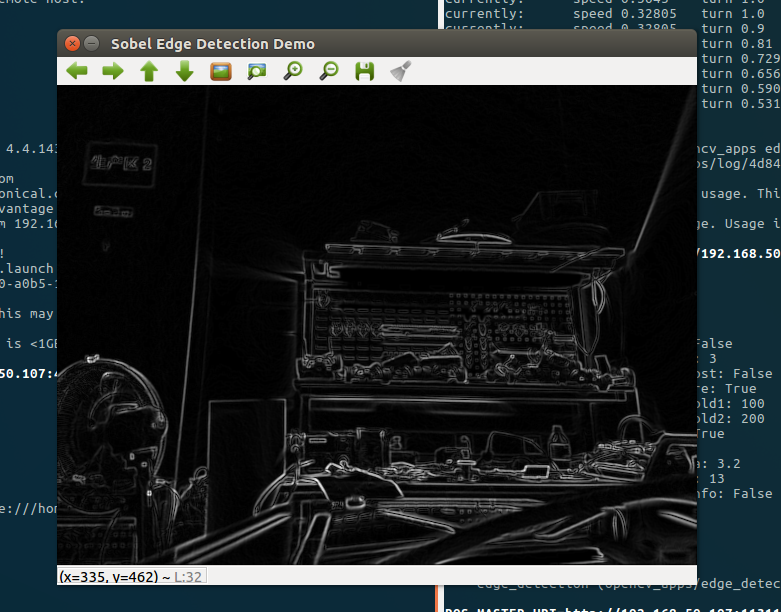
效果如下:
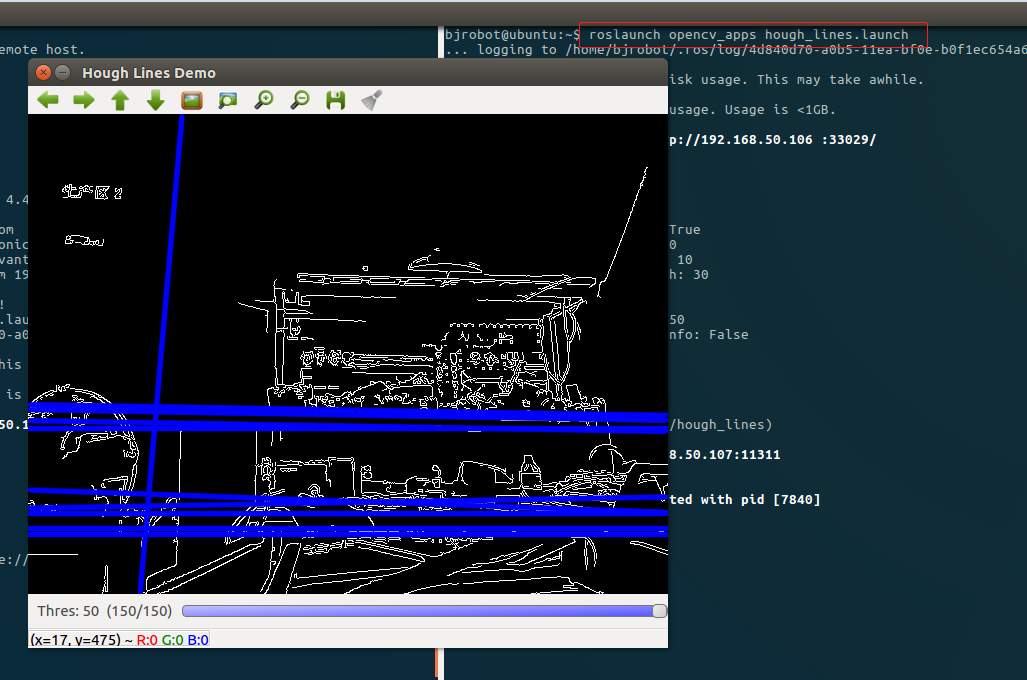
3.在虚拟机端启动 roslaunch opencv_apps hough_lines.launch 进行哈夫变换直线检测。
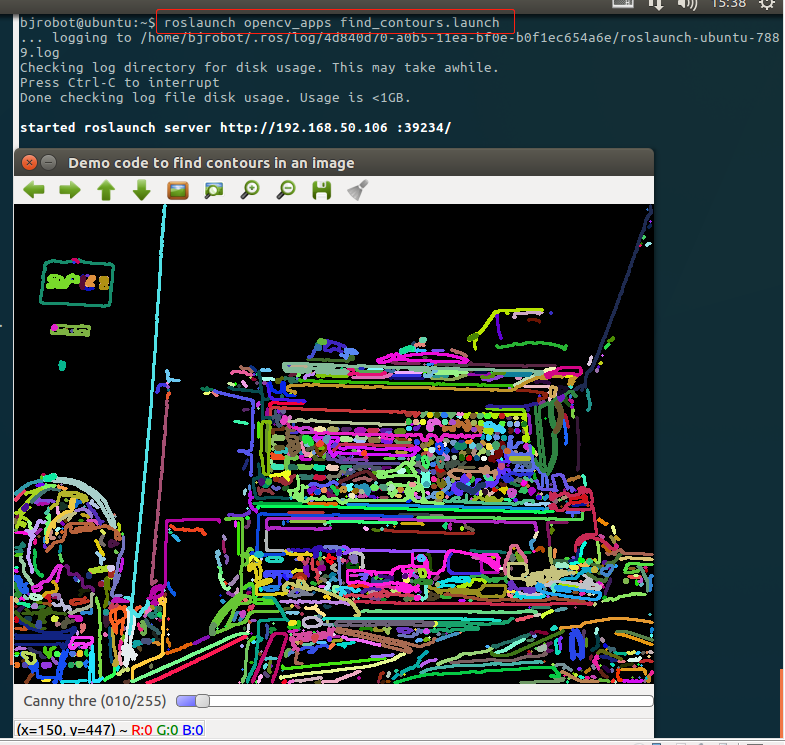
4.在虚拟机端启动 roslaunch opencv_apps find_contours.launch 进行霍夫变换日元检测

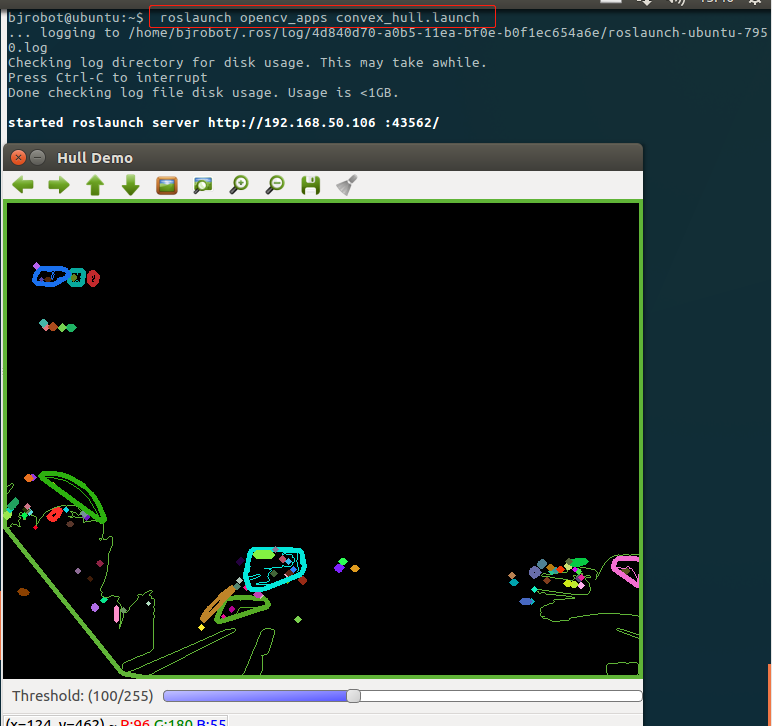
5.虚拟机端启动 roslaunch opencv_apps convex_hull.launch 进行凸包检测
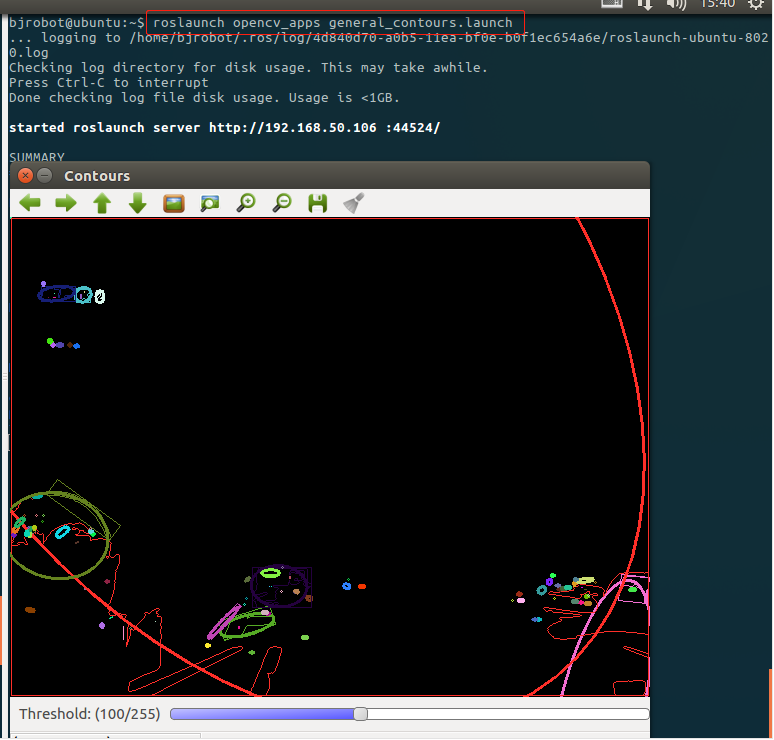
6.在虚拟机端启动 roslaunch opencv_apps general_contours.launch 进行椭圆形检测。
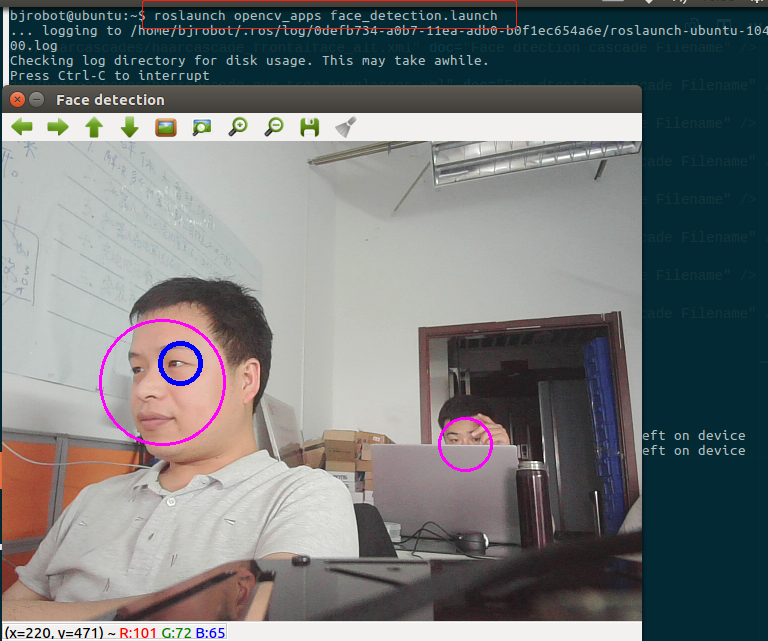
7.在虚拟机端启动 roslaunch opencv_apps face_detection.launch 进行人脸检测
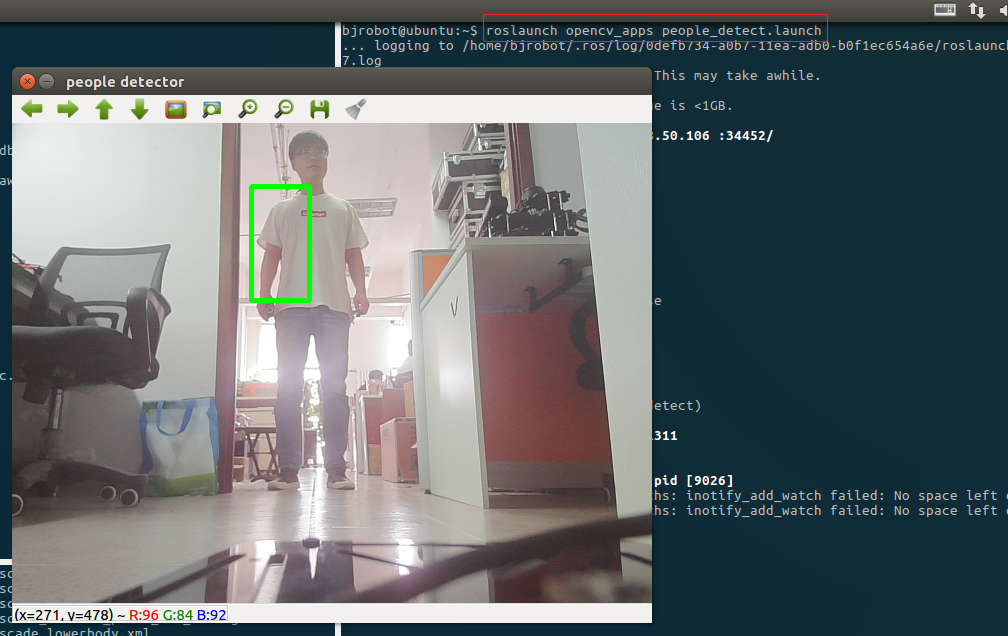
8.在虚拟机端启动 roslaunch opencv_apps people_detect.launch hot 特征量进行人的检测。
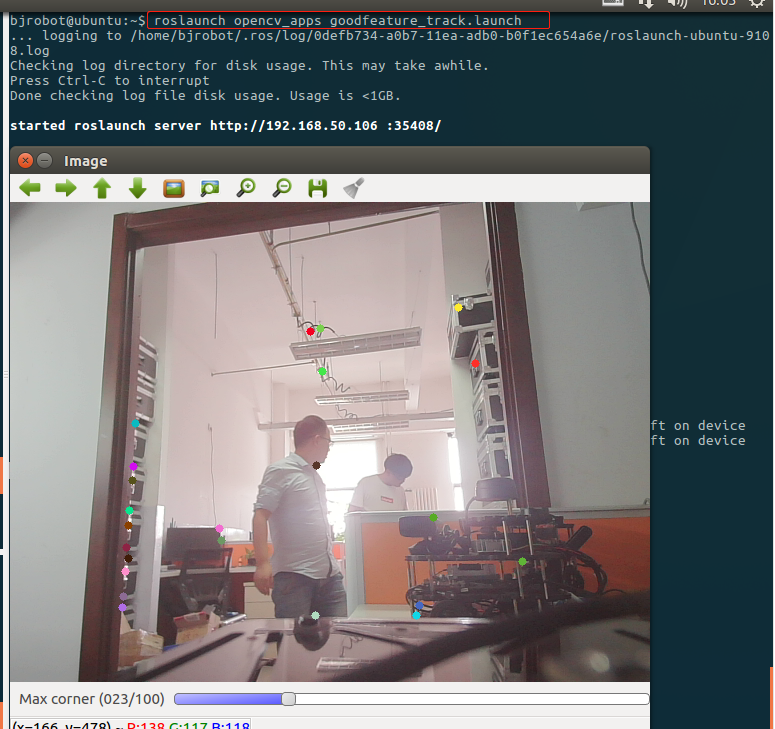
9.在虚拟机端启动 roslaunch opencv_apps goodfeature_track.launch 进行动作特征分析。
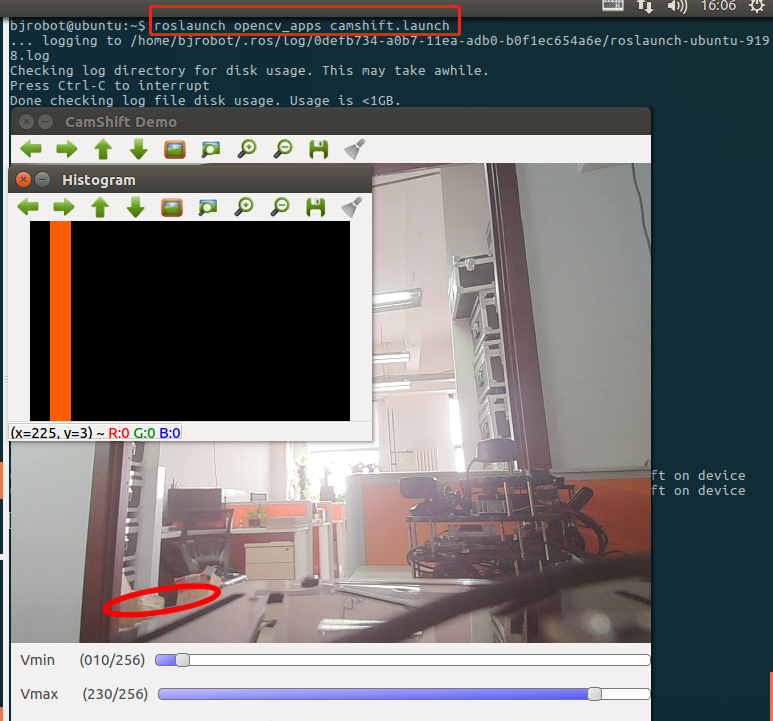
10在虚拟机端启动 roslaunch opencv_apps camshift.launch 进行颜色检测。
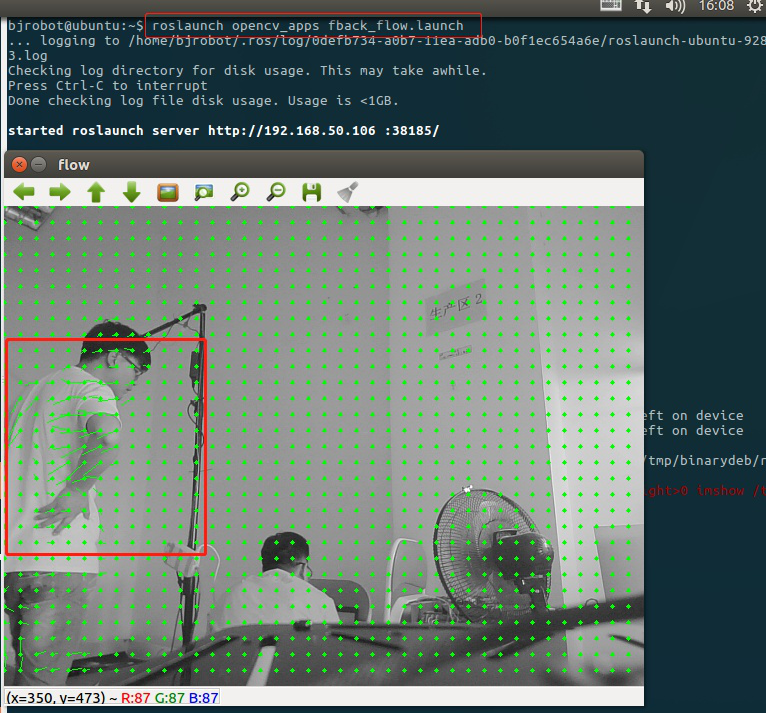
11.在虚拟机端启动roslaunch opencv_apps fback_flow.launch 进行gunnar farneback (optle)检测
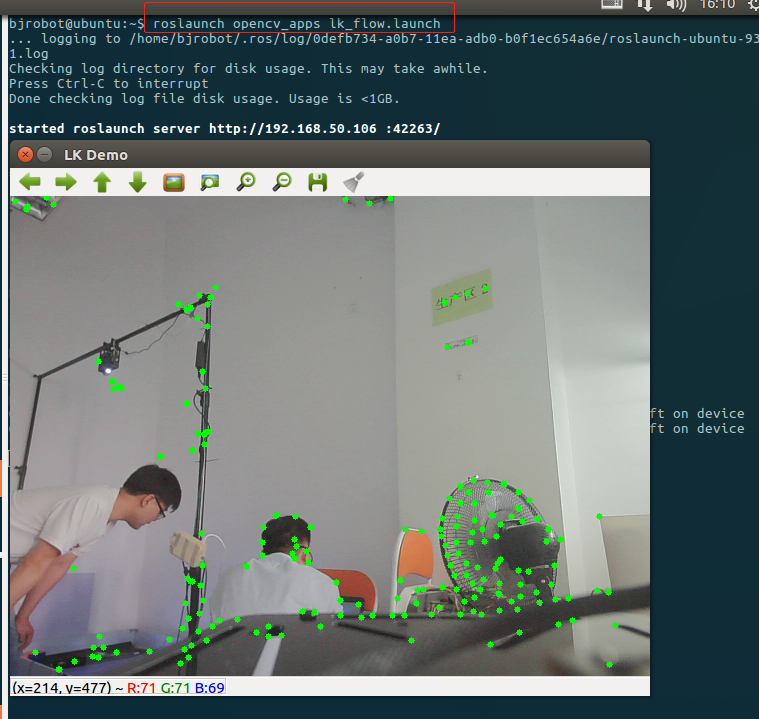
12.在虚拟机端启动 roslaunch opencv_apps lk_flow.launch 进行 lucas- kanade 法的optle 流检测
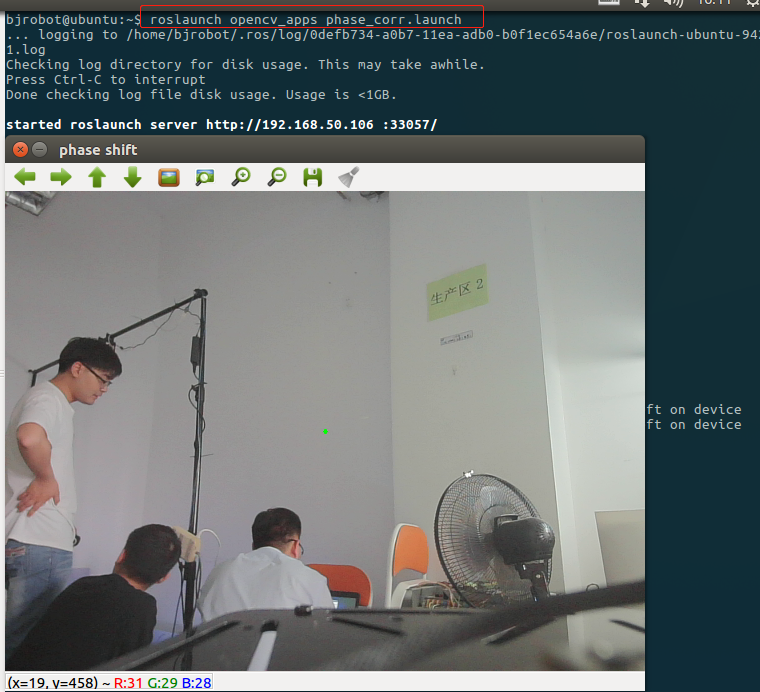
13.在虚拟机端启动 roslaunch opencv_apps phase_corr.launch 进行周波数相位模拟计算。
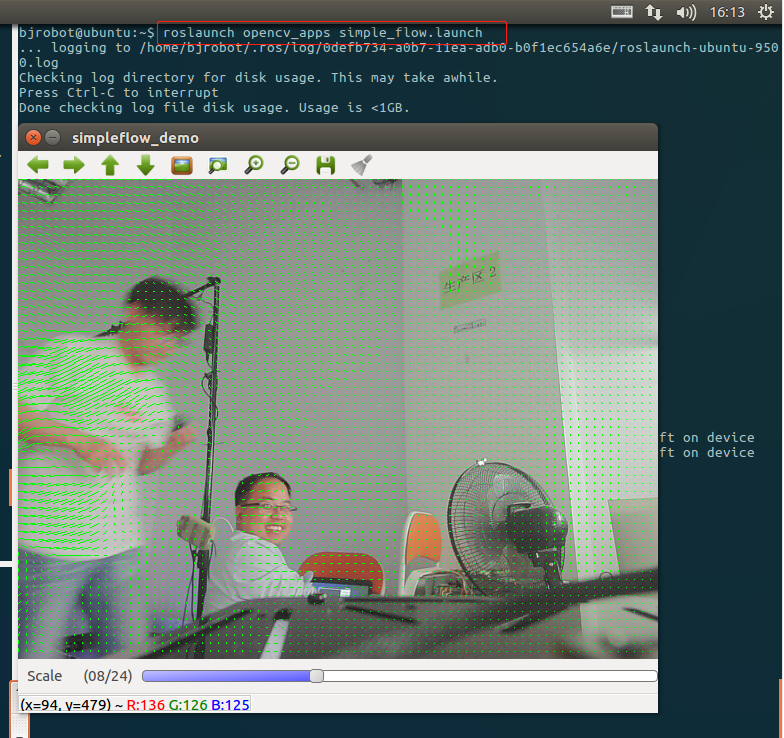
14.在虚拟机端启动 roslaunch opencv_apps simple_flow.launch进行simple_flow 的 opta 流检测
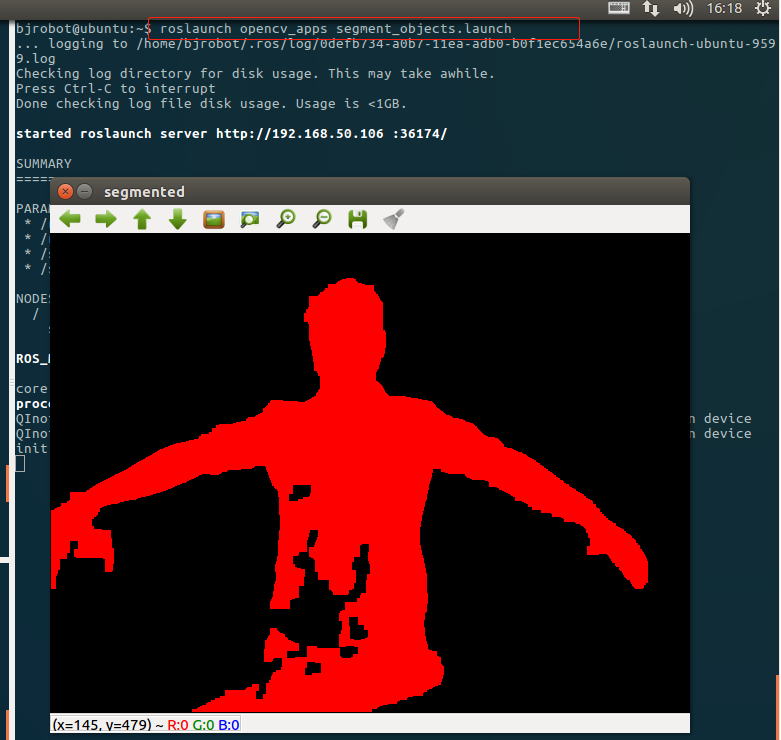
15.在虚拟机端启动 roslaunch opencv_apps segment_objects.launch 进行单一物体的区域分割
16.在虚拟机端启动 roslaunch opencv_apps rgb_color_filter.launch 进行图像过滤。

17.在虚拟机端启动 roslaunch opencv_apps hls_color_filter.launch 进行 hls 色特征采集
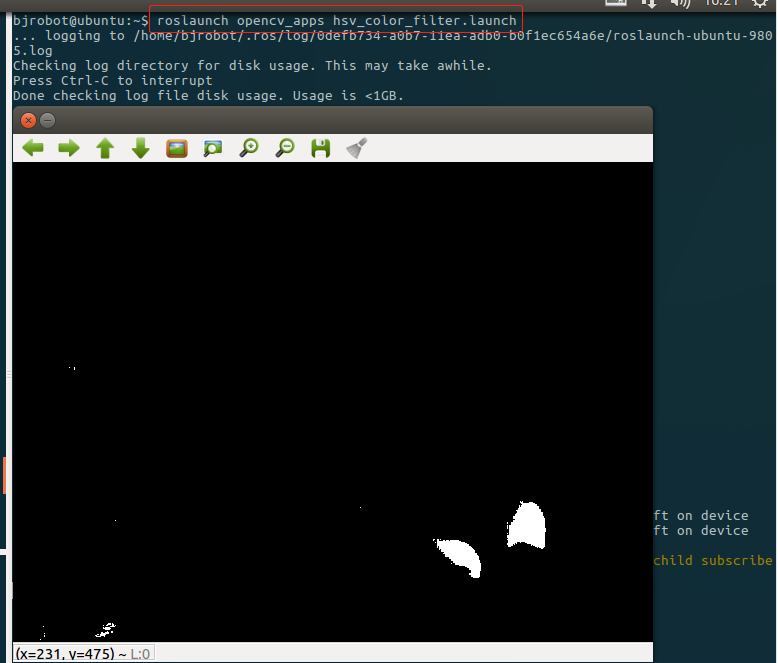
18.在虚拟机端启动 roslaunch opencv_apps hsv_color_filter.launch 进行 hsv 色特征采集