时代不断变化,科技不断进步,随着5G技术的出现,自动驾驶成为了人工智能领域研究的热点。虽然,对自动驾驶技术的研究越来越深入,但是,不得不承认,自动驾驶技术依然存在很大的不足。
目前,自动驾驶尚未成熟,尽管自动驾驶技术已经成为了研究的热门,但它未来要走的道路依然还很长,为了能够更好的了解自动驾驶,今天,我们就来学习一下,自动驾驶的相关知识。
车路协同教学与试验先导平台 · 研发背景
随着我国交通行业的不断发展,智能交通系统在提升道路安全性、提高公路交通设施使用效率、解决城市交通拥堵问题等应用中扮演着越发重要的角色。同时,随着人工智能、通信、信息技术的不断突破,智能交通技术及应用也在进行着飞速革新,诸如智慧城市、智能管控、车路协同、自动驾驶等已成为智能交通系统新时代核心技术发展的关键方向。但目前交通领域缺少一种能够将智能交通前沿技术进行融合展示,应用于集教学、科研、展示为一体的,服务于新形势下人才培养、技术测试、效果展示、沉浸体验的新型智能交通一体化综合实验平台。
智能交通系统前沿技术的复合创新型人才培养需求逐渐迫切。特别是主动管控技术、车路协同技术、自动驾驶技术,作为智能交通系统发展的更高级阶段,融合了新一代通信技术、传感器感知技术、交通检测技术、图像处理技术、大数据分析技术等,能够充分挖掘道路交通运行潜力,改进复杂交通环境下道路信息多元化提取方式,通过动态实时的信息交互,缓解交通拥堵、保证行车安全、提高居民出行舒适性。
在此背景之下,北京智能佳科技有限公司、北京千乘科技有限公司联合北京工业大学驾驶行为实验室经过多年的技术迭代与升级,研发出一套面向新一代智能交通人才培养的综合实验平台及系统——车路协同科研教学与实训先导平台,提出了智能交通新兴技术需求驱动的教学、研究、展示、体验一体化的平台级和系统级解决方案。
自动驾驶 · 行业痛点
自动驾驶之所以仍然存在不足和巨大的改进空间,是因为自动驾驶行业,有着两大痛点:
1、自动驾驶人才缺口:一份来自indeed网站数据显示,从2015年开始,与自动驾驶相关的技术岗位需求增加了近10倍。
2、高校存在问题:理论丰富,实践经验较弱,缺乏“理论”到“实践”的中间桥梁。
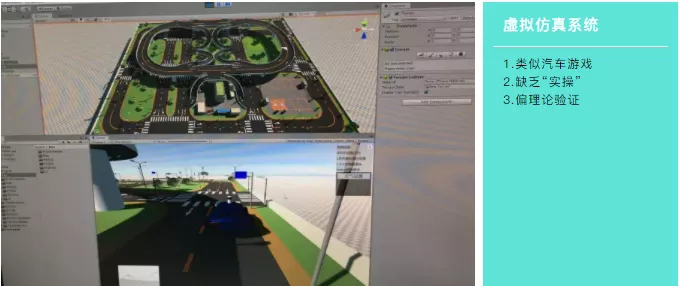
重展示,轻操作

轻实践,重理论
缺乏“教学实训”工程应用人才培养实践平台
而针对目前的缺点,车路协同科研教学与实训先导平台应运而生,并且走在了科技的前沿。
解决 · 思路
为了解决上述的行业痛点,车路协同科研教学与实训先导平台在研发时提出了以下思路。
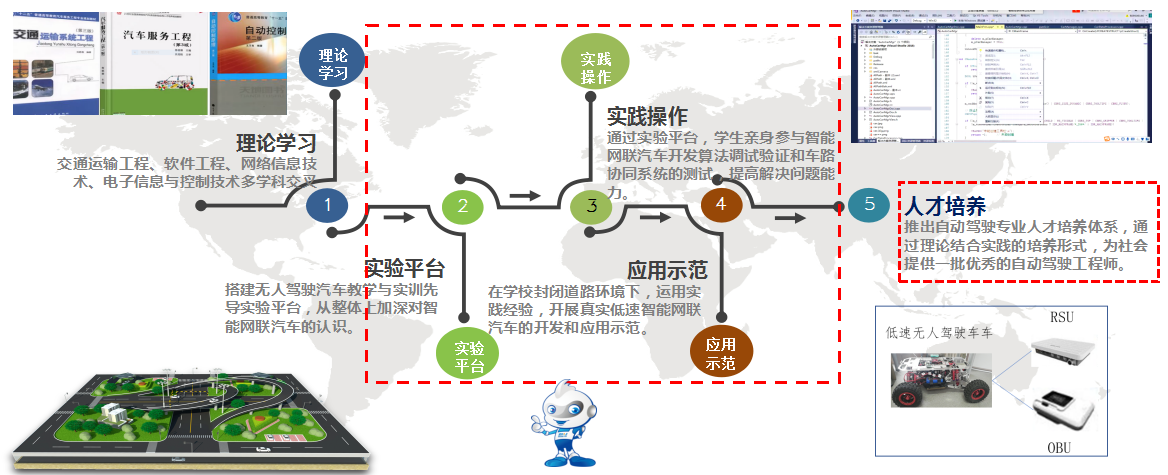
搭建目标
1、培养学生自我发展、自我实践的创新能力
2、以多学科交叉为特色的综合应用实训平台
3、智能交通系统设施、控制设备的微缩移植
功能理念
虚实一体
既有道路元素、交通元素、通信元素等物理实体平台级展示,又有管控方案、优化策略、虚拟现实等系统级应用。
数字孪生
实现现实场景、平台场景、虚拟场景的实时互动,通过数字孪生技术在中控系统再现交通场景、通信场景、管控场景,并与人机动态耦合。
互联互通
平台通过可扩展的开放接口,实现平台场景(智能车与中控系统)与现实道路元素、车辆、驾驶模拟系统、虚拟仿真系统的定制化互联互通,支撑技术测试、虚拟体验、仿真评估等实际需求,并可实现自主研发与升级。
设计理念
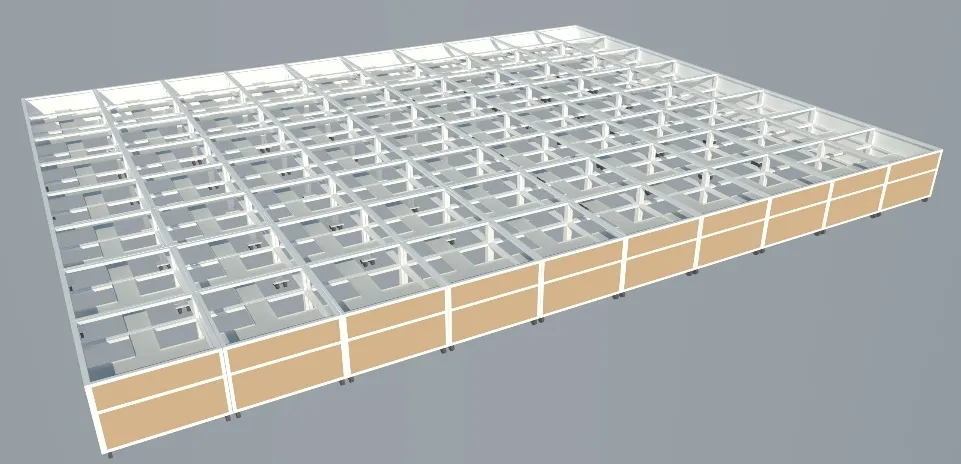
模块化
平台的物理结构由多个独立标准化模块组装而成,每个支撑框架可移动组装。各模块各司其职,其开放、可扩展的特性,为增添其它交通场景,提供便利。针对不同需求方,能够提供不同场景、不同尺寸的定制化设计。
结构化
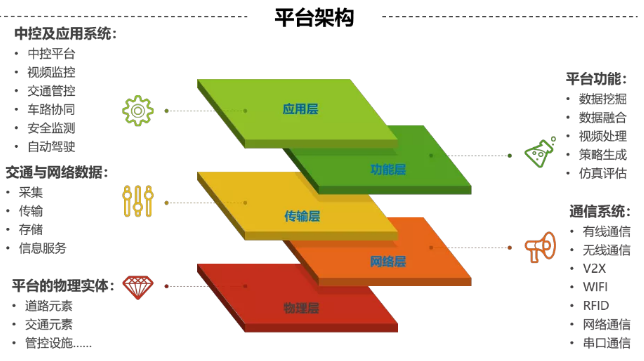
平台采用系统架构设计思路,整个平台包含物理层、网络层、传输层、功能层和应用层。物理层由道路、交通元素、管控设施、智能车辆等物理实体组成。网络层分为有线通信系统和无线通信系统。传输层主要负责平台数据的采集、传输、存储。功能层负责实现对于采集数据的融合处理和进一步的数据挖掘,根据数据分析结果生成相应控制策略,进行仿真评估。应用层主要由中控平台系统、智能车辆系统和交通管控系统组成。
综合性
平台基于“多层次、模块化、立体式、可扩展、可定制、易拆卸、易组装”的设计思想,通过模块化路面、立体式路网、协同式控制的结构形式进行呈现,综合实现物理要素映射、新兴技术再现、关键场景再造、优化策略评估等。
搭建中间桥梁,推动车路协同及自动驾驶的技术创新,打造国内一流乃至国际领先的车路协同全栈式教学与实训先导实验平台,助力培养车路协同和自动驾驶人才。
车路协同科研教学与实训先导平台 · 介绍
车路协同科研教学与实训先导平台可实现道路环境、交通设施、自动车辆微缩移植到实验室,分层模拟构建包括交叉口、快速路、匝道在内的典型道路环境及智能交通设备。同时,可进行交通道路环境和交通事件模拟,支持道路设计、交通管理、交通安全、违法管理、车辆行为优化等教学、科研工作。

车路协同科研教学与实训先导平台以多学科交叉融合为特色,以自主创新实训为手段、以团队协作为组织模式,以培养综合知识应用及创新能力为目标,惠及交通运输工程、自动化工程、软件工程、通信工程等专业的学生,团队合作,构建以多学科交叉为特色的综合应用实训平台,培养学生自我发展、自我实践的创新能力。

车路协同科研教学与实训先导平台采用模块化、积木式设计,具有开放性、扩展性结构,支持多学科交叉实训和教学、科研、展示协同创新。采用模块化、积木式设计思想,实现任意模块间的拆分和组合,利于各模块都得定制化设计和组装,便于平台的拆解、移动、组装、替换和维护。平台聚焦交通专业认知、交通工程设计、交通管理与控制、智能车路协同和自动驾驶技术等交通管理专业的技术实训和教学研究。
车路协同科研教学与实训先导平台由物理层、网络层、传输层、功能层和应用层组成,其中物理层涉及平台的物理实体,如道路元素、交通元素、平台物理模块等,网络层涉及通信模块、有线/无线通讯、物理元素之间的连接等,传输层涉及交通与网络数据采集、传输、存储、信息服务等,功能层涉及数据挖掘、融合、策略生成等,还包括平台包含的功能模块,应用层涉及中控系统功能,交通工程应用系统等。如交通控制、交通管理、车路协同、交通安全、自动驾驶等应用。
车路协同科研教学与实训先导平台可实现全方位的交通管理专业的教学和实训,主要有交通工程认知、信息采集系统、视频监控系统、信号控制系统、停车场管理、智能车辆系统、实时定位系统、车路协同系统、网联车队系统和中控管理系统等十大功能。

智能路网 · 模型
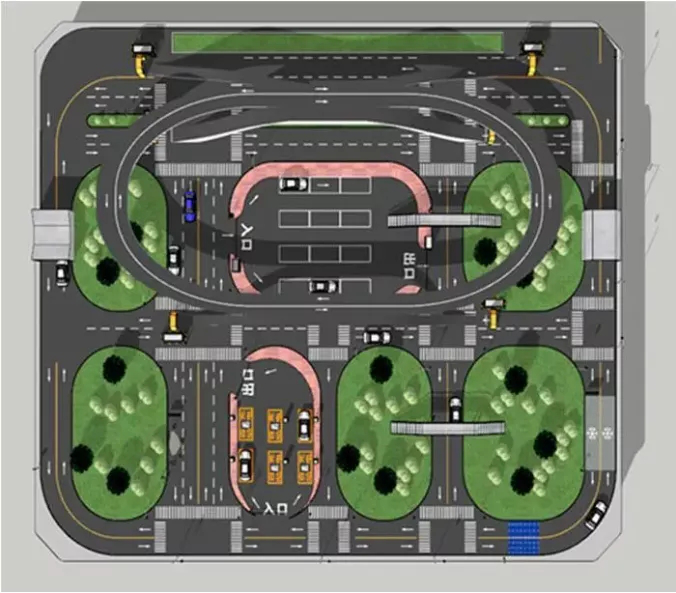
定制不同的交通路网环境
作为智能车运行的载体,智能路网系统可定制不同交通路网环境,设计成整体固定和模块化拼装两种方式。
道路可设计成城市道路、高速路、潮汐道路、公交道路、生态道路、各种匝道等,配置各种道路设施和标志标线,以及各类传感器模块。
可提供现车辆位置信息读取,交通信号灯智能调度,停车位智能动态分配与充电等功能。


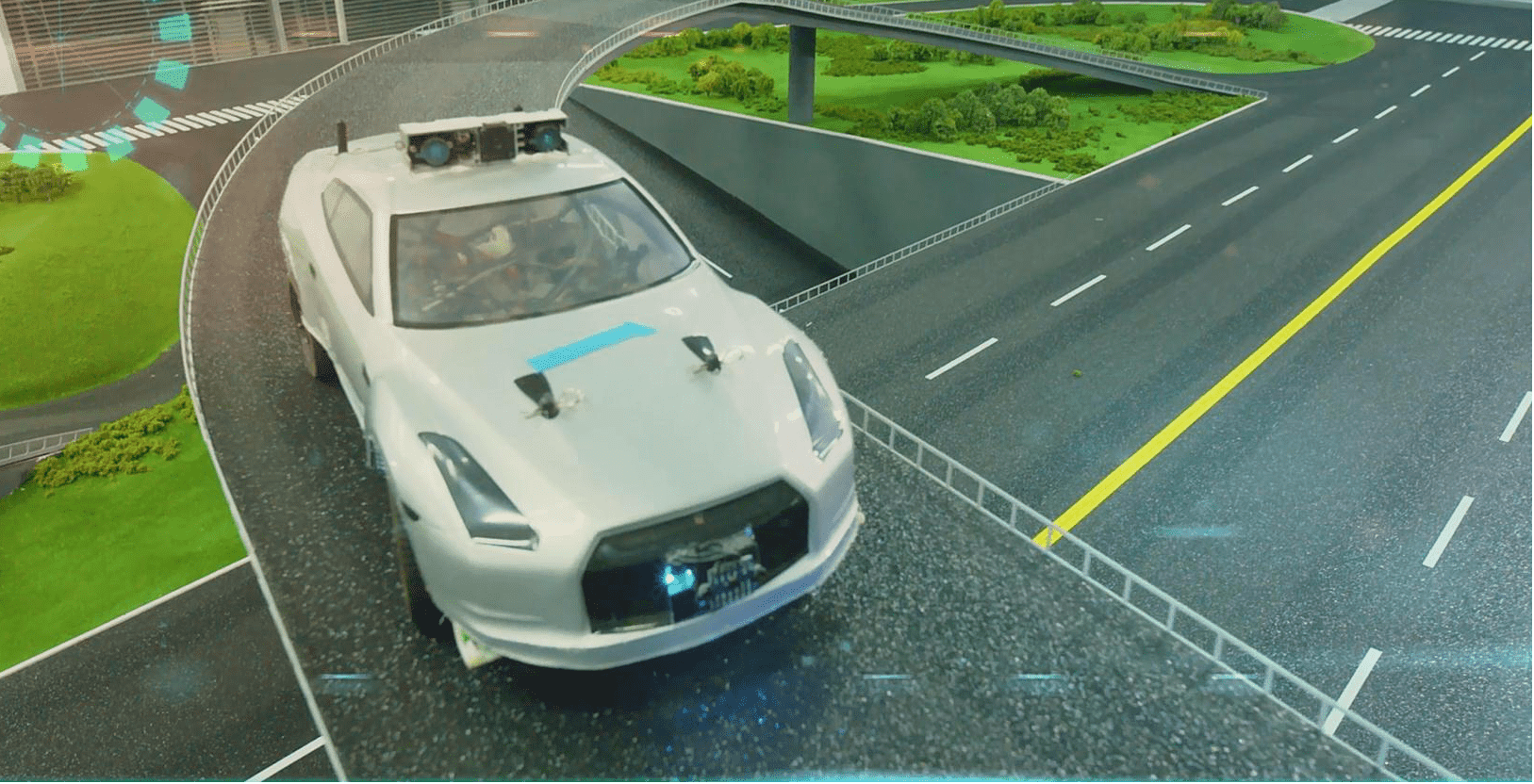
车路协同科研教学与实训先导平台是国内首创——无人车室内研发方案,为自动驾驶的研究与普及提供了条件。
关于自动驾驶方面的知识,到这里就告一段落,如果您对此感兴趣,请关注我们,我们将为您提供更多人工智能领域的文章。