GelSight技术:使得机器人可以稳稳地握住电缆
GelSight技术使机械手能够沿着USB电缆的长度移动,而不会掉落
早在2011年,我们首次听说了由MIT开发的系统,该系统实质上是使机器人能够通过指尖去“感受”。现在,这项技术被广泛应用于机器人精准操纵电缆。
这个系统的基本版本被称为GelSight,它包含一块一面涂有金属漆的透明合成橡胶板。当涂漆的一面压在一个表面上时,它会变形为该表面的形状。透过橡胶未涂漆的另一面,可以由向上压入的涂料看出表面的细微轮廓。
然后使用相机和计算机算法,可以将这些轮廓转换为3D图像,从而捕获深度小于1微米,宽度小于2微米的细节。为了使系统不会被多种颜色或材料所混淆,选择使用油漆来规范表面的光学质量。
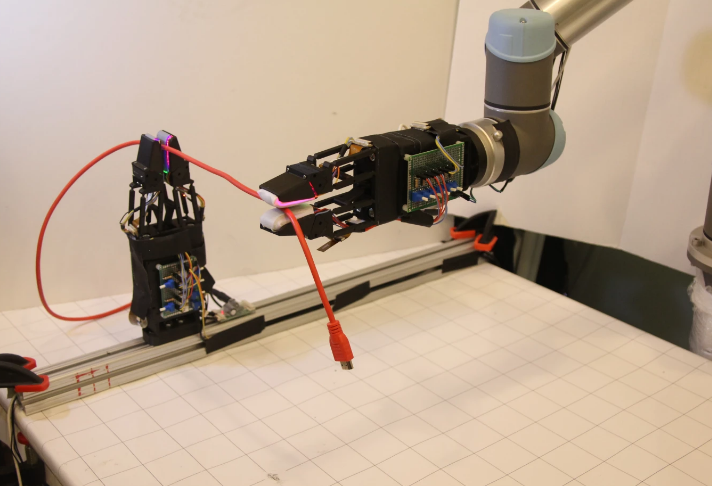
麻省理工学院的研究人员在博士后学生Yu She的带领下,已经开始采用这种技术,并将其应用于双指机器人的抓手指垫上。
实验显示,当机械手紧紧夹在电缆上时,该系统既可以知道电缆在每个垫片上的位置,又可以通过监视摩擦力得知电缆在机械手之间的穿行速度。使用该数据,计算机可以在三维空间中连续调整机械手的“姿势”及其抓握强度。调整“姿势”可将电缆居中放置在两个垫片之间,而调整抓握强度可以在保持握住电缆的同时,随着它的移动使电缆在两个垫片之间滑动。
除此之外,当前该项技术还可以让机械手抓住松动的耳塞式电缆,沿着电缆的长度滑动,直到其末端检测到插头,调整该插头的方向,然后将其插入耳机插孔中。不过,一旦进一步发展,人们就会希望该技术能够应用到生活当中,例如在汽车的装配线上插入电线,甚至对患者进行手术缝合。
